my quad in hover having the throttle stick in the mid position slowly descends or climbs
This problem exists in every flight mode!
1 Like
Post a link to the .bin flight log for help with this.
What was fligh mode ?
Do you installed GPS , if you don’t have GPS the altitude will change by barometer oscillation
Happening to me also!
There is some serious BUG. AC 4.0.5
Didnt have this problem with 4.0.3
to describe my setup: I have companion computer that generates PPM signal. If drone is higher than requested, it gives signal to descent and other way around. There is some hysteresis (deadzone).
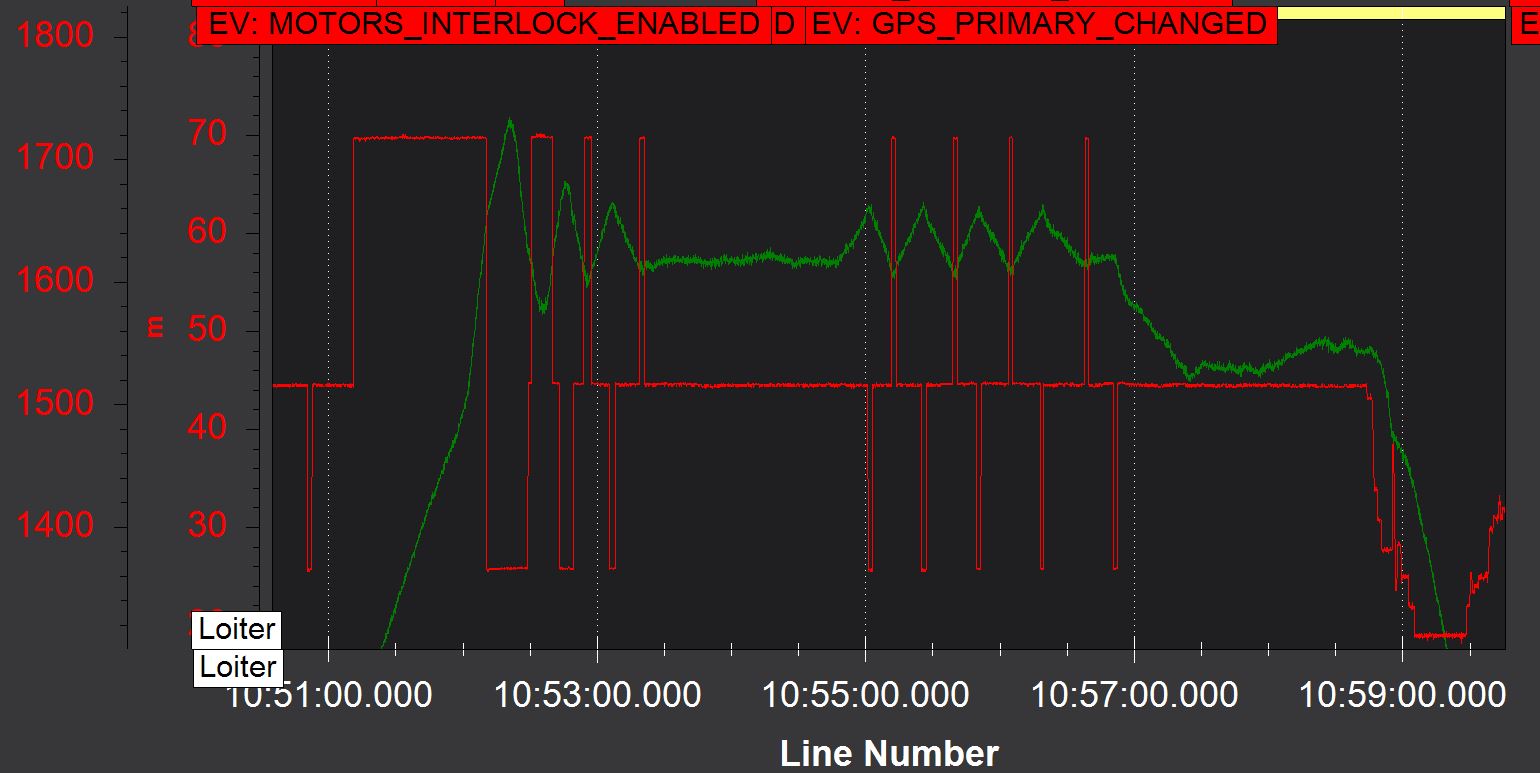
Look at my signal. notice that it started to ascent much sooner than i change signal (my signal is not 1500 but cca 1520 - but deadzone is set to 80). then i gave signal to lower altitude for cca 3sec. and then it didnt stop descending until i gave signal to acsent again. look:
What the hell is going on?
https://drive.google.com/file/d/1tOUGgBhP77czQsGMN1Plej_JMrxZ1PJ3/view?usp=sharing
https://drive.google.com/file/d/1kIZxi31NuQQXQ6AQ_J0-ri34HXvdvfWI/view?usp=sharing
https://drive.google.com/file/d/1mpG4MwMpxbRyEPreIMoFv19_udoiJNLj/view?usp=sharing
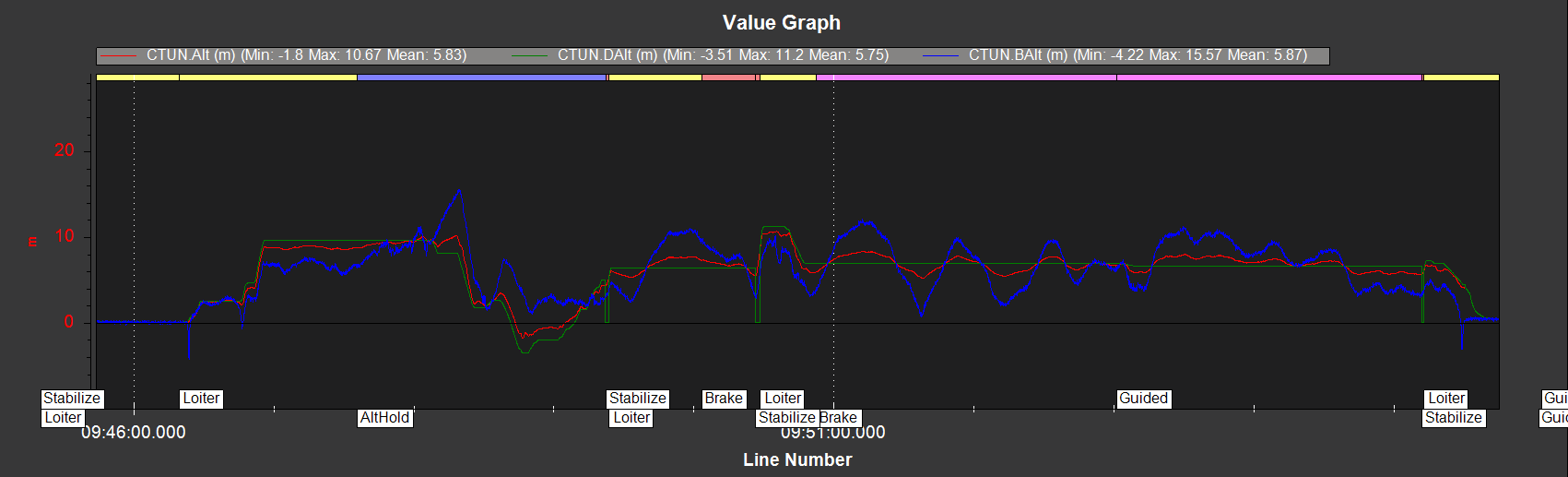
Your problem is your Barometer pressure is highly affected by airspeed. This is a common problem and is an issue with the aerodynamic design of the aircraft. Another baro problem is ground effect causing a pressure bubble as you get close to the ground.
One solution is to use gps altitude.
Have you seen mine? and can you tell me why this was never issue with previous version? and if you read GPS altitude, it is quite the same with barometric. It was a calm day, and drone wasnt moving to sides
Hi @Vaclav_Demeter
i cant understand your problem, by looking at the log everything was ok and FC reacted well to throttle change
Look at time 10:55. the drone started to ascend way before the throttle changed and later, the drone continued descending with throttle at middle level. and again and again.
Am i missing something obvious?
tanks
According to the log, is there a vibration problem?
and
Should the barometer be in an air-flowing environment?
Because in my quad, the flight is in the center of the quad and the flight control is closed all around
vibration level is good
no actually
tanks
how to disable barometer ?
If in your case barometer is indeed the problem, than just set the EK2_alt_source to 2 (GPS). Right now you have it set to 0 propably. I havent seen your logs, so i dont know.
But its not problem in my case.
as @Vaclav_Demeter said you can set EK2_ALT_SOURCE = 2 to use GPS altitude
but be careful in case of GPS glitch your copter will be crazy badly so always fly in aria with good GPS signal
@Vaclav_Demeter in your case i checked your log many times and im out of idea whats happening but let try with EK2_ALT_SOURCE = 2 too in your case and see what will happen
Well. I could but it wouldnt solve my problem. Because if you look at the logs, the batometric altitude and gps altitude are very similar.
So it measures altitude precisely with both barometer and gps (alt_source is set to barometer)
and yet it decides to ascend/descent.
Very strange issue.
Yes but we need to change something, to get a point to work on it
I understand,but there is a little-big problem.
I had this firmware uploaded one more day before these logs. and that day this wasnt an issue.
Than the day from the logs it happened more than once.
So i thought about what parameters did i change in the morning and there were only two.
I changed LGR_OPTION from 0 to 3 (because as i wrote in different post in 4.0.5 lgr deploy/retract based on altitude dont work in loiter. it worked with 4.0.3)
and changed PLND_EST_TYPE from 0 to 1
Both should have no effect on this.
But still i changed them back.
Since then, i flew for maybe 10 hours and this error didnt occur again.
That is the problem. Because i cannot really replicate the error.
But i know its there, and its possibly dangerous.
I have a big expensive drone on which i cannot really test parameters i am not sure wont endanger my drone.
And when this drone goes to client, and this error occurs, it could be dangerous.
And that is really a problem, because since arducopter 4 was released, i havent found any really stable version.
I have 2 GPS CAN connected. on early releases of arducopter 4 there were some compass issues. than arducopter 4.0.3 seemed good, but once in a while “internal error 0x400 (or something similar)” occured, which did not allow me to arm (even after reset) (and i read in other post that someone had the same issue with 2 CAN GPS connected). Than there was 4.0.4 which is no longer flaged as stable in mission planner.
And now there is 4.0.5 which i know has this mysterious error.
And as i wrote, somehow the same settings for landing gear as in 4.0.3 dont work.
So officially you can now only buy Here3 CAN GPS (if you want larger quantities and not buy on amazon/ebay) and yet i have found no stable firmware that would allow me to use them.