Here is a copter that I have been flying and does OK on 11x4.5 inch props, but I wanted to try 10x4.5 inch props to see how it would fly. The result is this very strange motor surging ( see video ) This test was with the following:
ArduCopter 4.1 In Kakute F7
Fully charged 4 cell battery.
100 % commanded throttle, confirmed 100 % in ardupilot the entire time.
Only change is switching to 10x4.5 inch props.
Does anyone have an idea what is causing this motor surging or how to fix this ???
Are you suspecting that this an ArduPilot issue, that a setting could solve this ? Here is a log of it flying with the 11x4.5 props, any suggestions of where to start on this is appreciated !
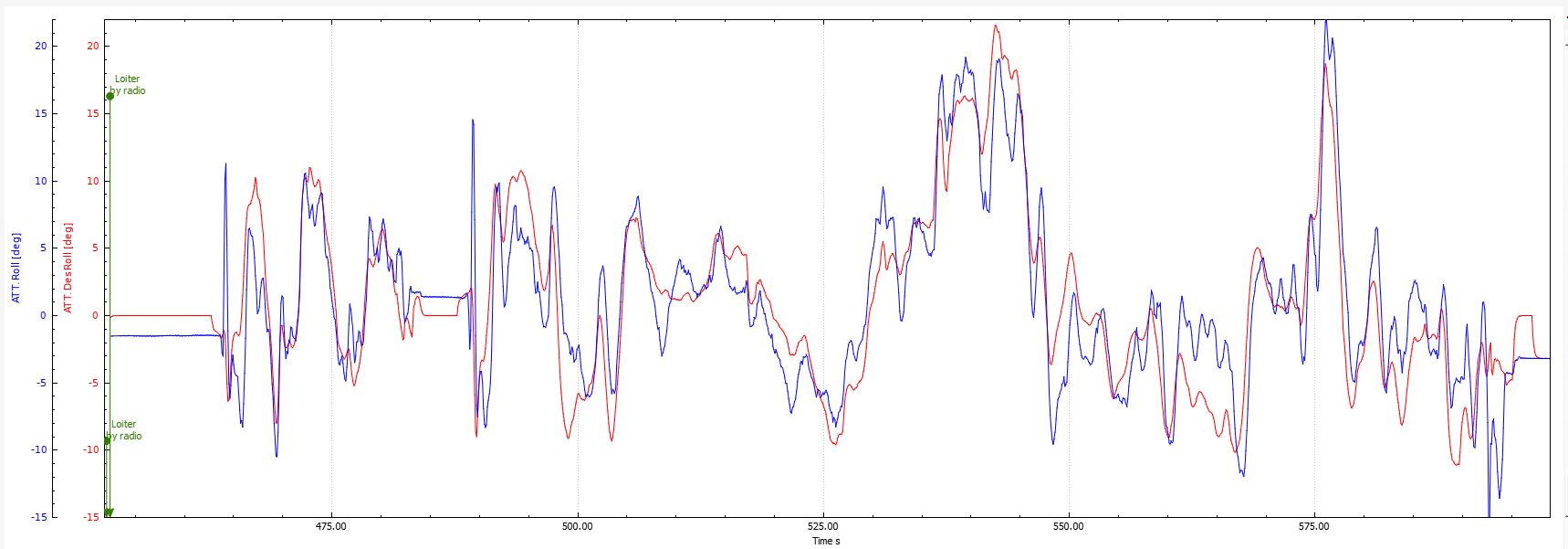
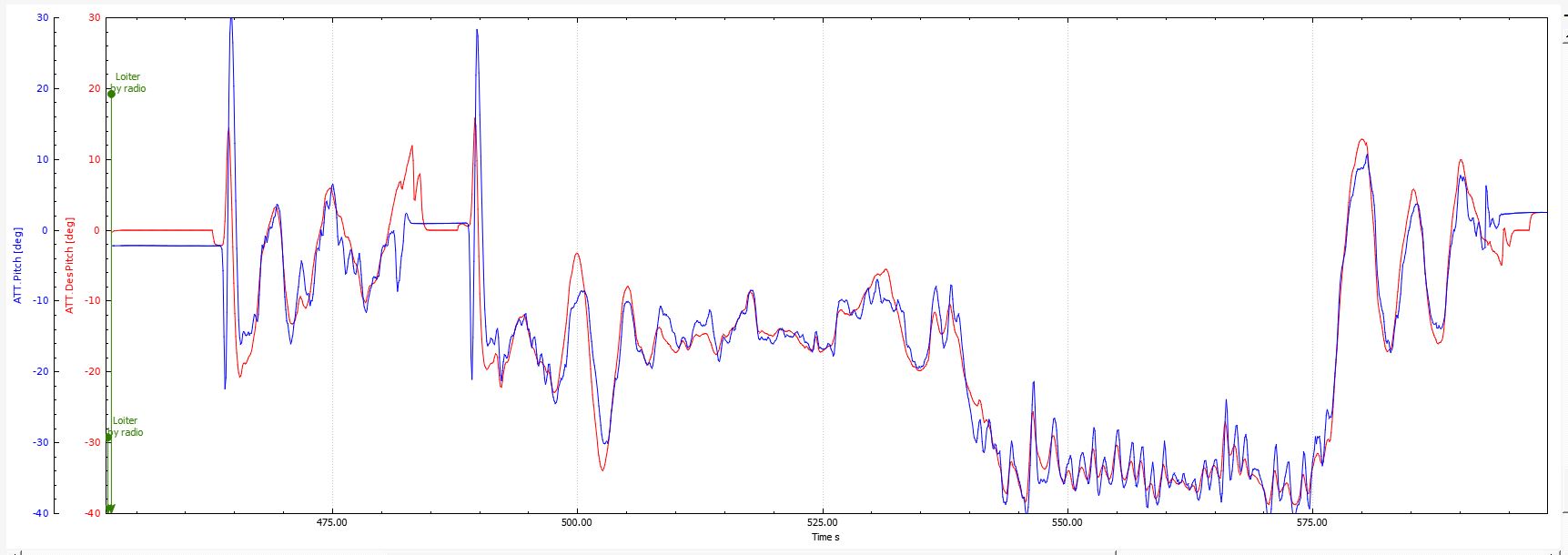
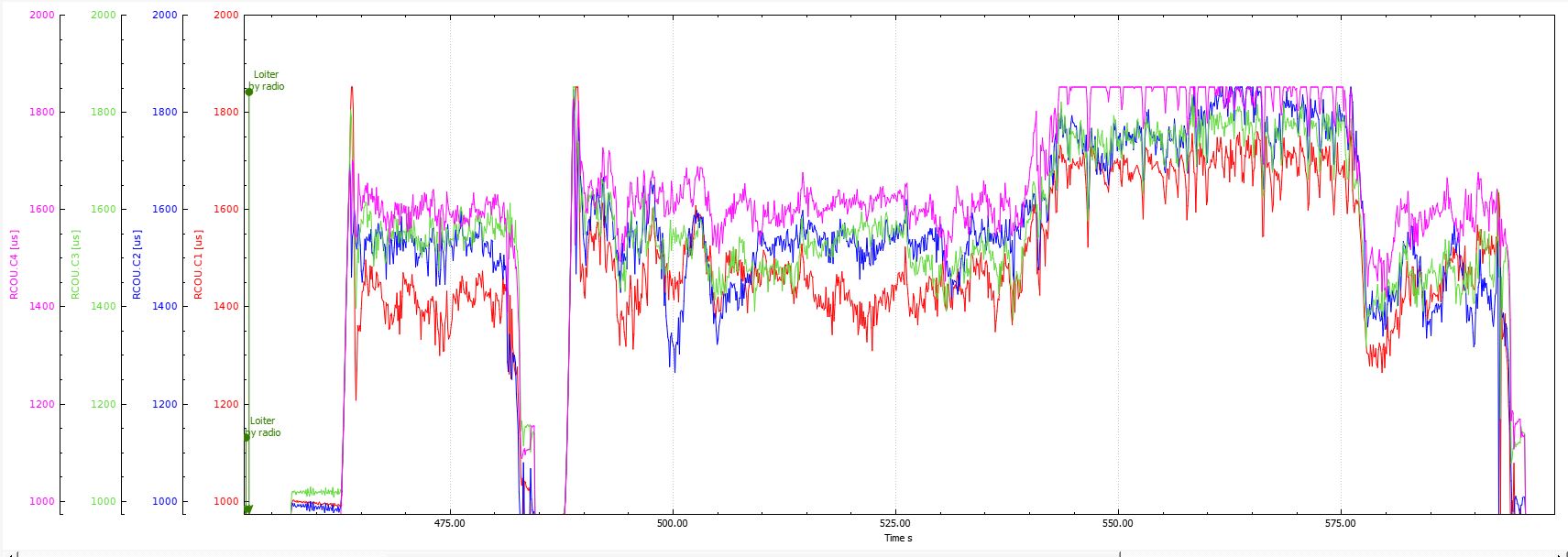
motors are going to maximum in that log (at times) and pitch/roll stability is only just getting by. Things could be better.
Plug in these values and stick to the 11inch props, unless you can reduce the take off weight.
MOT_BAT_VOLT_MAX,16.80
MOT_BAT_VOLT_MIN,13.20
BATT_ARM_VOLT,14.70
BATT_CRT_VOLT,14.00
BATT_LOW_VOLT,14.40
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
…and probably run Autotune
A few things I notice with this configuration. Tuning is not great. It’s not typical that the Rate I term is higher than P. Did you manually lower P? Stabilize Pitch and Roll look low also for this craft. These F450’s fly pretty well on defaults.
You certainly don’t want to use a smaller prop the average motor output is a bit higher than you would want now with the 11" props and they are not that well balanced (motor output balance)
I would:
Put the 11" props back on
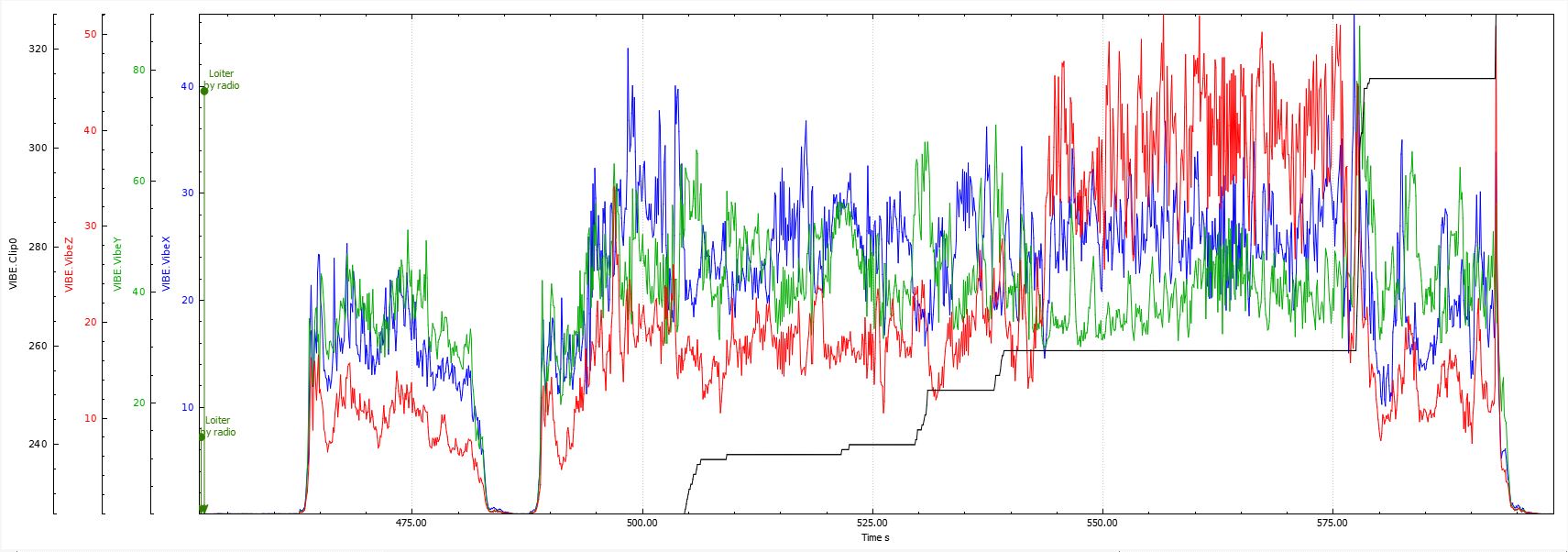
Fix the Vibe problem.
Reset the PID’s to default
Set the Motor Voltage scaling parameters
Set INS_LOG_BAT_MASK to 1 (to record data for the notch filter)
Make a simple AltHold hover flight for ~ 1 minute and post that log.
Set notch filter params
Run Autotune
Thank you for the detailed analysis and recommendations. I have and am flying 2 of these copters built with the exact same items, so I know I am not getting a hardware or connection problem, etc.
I changed the PID’s manually, because with stock settings, I was getting occasional loss of control in mid flight and crashes. If I run auto tune from default settings, I have to run it over tall grass as auto tune induces a loss of control crash 3 out of 4 attempts. When the autotune did finish without crashing, and was successfully saved, the resulting tune was very unstable and wanted to crash in flight even more than the stock settings.
I can restore defaults and attempt auto tune again. Is there anything you would recommend I change before doing the auto tune, or change manually before doing auto tune ???
Yes, reset to default. The vibe problem should be addressed 1st. Balance the props, and how is the Kakute F7 mounted? I have these FC’s and they need a compliant mount particularly on those noodle plastic F450 frames (have had a few).
Then connect to Mission Planner and hit the Alt>A keys for the tuning plug in and enter the values as prompted. Accept for INS_GYRO_FILTER (leave at default) set these (I do it manually from a screen shot of the values shown). Also set INS_LOG_BAT_MASK to 1 as I mentioned. Then make a flight in AltHold for ~ 1 min and post that Flight Log. The Notch filter should be set before running Autotune. After setting these parameters (I can help with that) you will make another flight with INS_LOG_BAT_OPTIONS set to 2 and make another AltHold ~1min hover flight and post that log.
Then if things look good you can run Autotune. It’s a bit of a lengthy process but all these cool features are there for a reason and should be taken advantage of.
OK, I have wiped the flight controllers, and just put the latest 4.1 firmware into the copters with the default settings.
I will do as you instruct and give you the results the moment I have them.
I have the Kakute F7 mounted on rubber vibration isolation mounts ( the 4 corner mounts ), and the sensor on the Kakute F7 is mounted on foam from the factory.
OK, maybe they need to be softer or the props are way out of balance. The vibe levels are too high to achieve an optimum tune. And as I said the IMU isolation foam on the Kakute F7 is not worth much. OK for Betaflight but unless you have a very rigid frame, which is the opposite of the F450 noodle, you need better isolation for Arducopter.
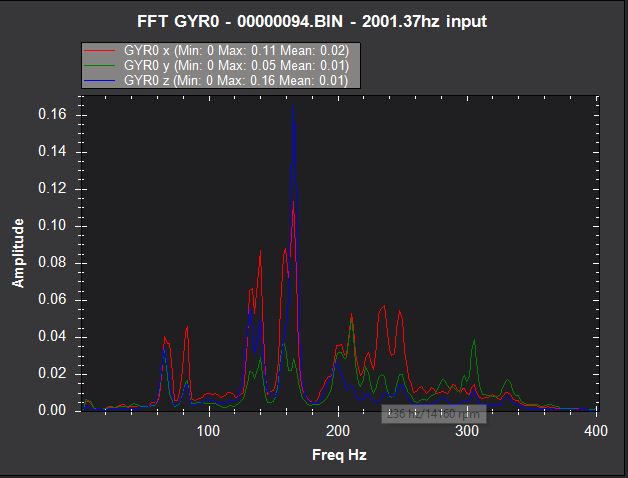
Here are 2 files, first is a crash landing and the last one is a one minute hover with INS LOG BAT MAK set to 1
I ran the autotune, and it worked ! Seemed to fly pretty good after autotune, no red VIB warning. BUT did not like to go fast, at 40 MPH I got an EKF error message, and it went to LAND mode and landed.
You didn’t follow the process as outlined. If you had you would not have run Autotune until after the Notch Filter had been configured. But whatever it’s flying. And you didn’t leave INS_GYRO_FILTER at default as suggested. Change it to 20Hz
Vibration Compensation Failsafe occurred in log 93. And as I posted before with Fast Forward Flight your motors are commanded to max and you lose stability. That craft as configured is not capable of this. Fly fast and risk a crash.
Autotune wouldn’t change the Gyro filter value. You don’t have to go back to default, you can set the Notch filter setting now and then run Autotune again after log review:
Follow this configuration carefully:
INS_HNTCH_ENABLE,1 (Then refresh the parameters to enable the following and set them)
INS_HNTCH_ATT,40 (ignore any warning, just do it)
INS_HNTCH_BW,35
INS_HNTCH_FREQ,70
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.36
Then change INS_LOG_BAT_OPTIONS to 2
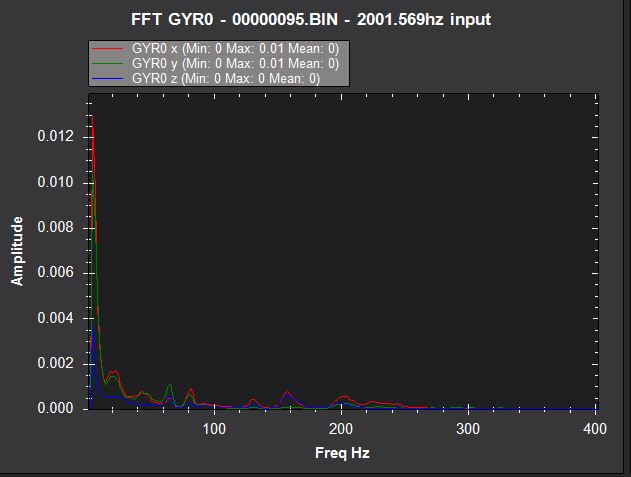
Don’t run Auto tune at this point just make another 1min Hover flight in AltHold and post that log. If it looks like the Notch filter is doing it’s job then you can run Auto Tune and hopefully be done with it!
Wow, that is a HUGE difference in the graphs !!! I ran autotune, and this time it tuned itself in less than 1/2 the time, and it flys great. Thank you for the help, I have been fighting this problem for over a year now. Even though they flew, I had to always be careful to keep control inputs smooth to avoid a loss of control and crash. It is good to finally get them stable and to where I can trust them.
One other question, you said I might be on the edge with the 11x4.5 props. Do you think it would be worth trying 12x4.5 inch props ?
Absolutely. I have built a few quads on those frames and have one still with extended arms and 13" props. So if they will fit go for it. You will have to change the notch filter parameters because the hover throttle position will change and the hover motor RPM which are considerations for the filter. If you do this set the INS_LOG_BAT_OPTIONS back to 0 and make another AltHold hover flight to determine new parameter values.