AUTO_OPTIONS,2 would be appropriate for some highly tested and regulated environments. Normally you wouldnt use this because if your copter is powered and you accidentally switch to Auto mode, it will just launch and go. Best to stick with manually raising the throttle.
Fair point. I’ll argue if you set it at 2 you still need to arm in a different mode. At that point blades are turning so a take off should be expected. I would be more worried about options set to 3. But I’ll agree that leaving it at 0 and using the throttle is the safest if the operator isn’t confident in their procedures.
Sorry, I tried to replicate the issue but I cannot replicate it anymore. Please ignore the issue on the radio.
1 Like
Yeah I just read the options now, since I already had a rant ![]()
1 Like
You got me worried a little bit. Lets say AUTO_OPTIONS is Allow Arming, I guess the steps will be:
- Disable Motor Emergency Stop
- Right YAW stick to arm the motors
- Flip the mode switch to AUTO
- Do I need to raise the throttle from this point?
If during the mission, I want to abort and switch to say AltHold and manually control the copter, is it possible?
Allow arming means that you can arm in Auto mode. Otherwise you need to arm as normal in another flight mode, then switch to Auto. With AUTO_OPTIONS,2 you would arm the quad, then when you switch to auto the quad would take off and begin the mission without any other inputs from the pilot. AUTO_OPTIONS,3 will let you arm the quad already in Auto mode, and then it will take off right away.
Regardless of how you entered auto mode, if you switch modes to Alt_hold or Loiter the quad will stop and you will have control appropriate to the flight mode.
Huh… Lucky the copter did not execute the mission the last time I tried it. So what is the safest way to start testing a mission. AUTO_OPIONS 1, 2 or 3. What I am looking for just in case any untoward event happen is, my bail out option is just to turn on Motor Emergency Stop and let the copter drop. Or back to say ALT-Hold and manually control the copter. While the copter is doing the mission, can I put the throttle stick at the middle?
Safest? AUTO_OPTIONS,0.
Arm in Alt_hold (or loiter).
Switch to Auto mode.
Raise the throttle to start the mission.
Once the copter is running the mission the throttle (regardless of AUTO_OPTIONS) won’t change anything. I leave it in the middle so if I do change to loiter (or alt hold) the quad will stay at it’s altitude.
Sounds like a good plan. I will test a simple mission tomorrow. Wish me luck.
1 Like
Here’s the Copter at my backyard for a test flight. Thanks for all the help to make it fly this good.
https://www.youtube.com/watch?v=zrLY0OLclPY
Here’s the flight log
https://drive.google.com/file/d/1dJDpCpM6sfQNm9qAlIRnBIq4Nt81okR2/view?usp=sharing
1 Like
Looks good, very good attitude control.
Using that battery-assist device to keep the GPS alive should keep you out of trouble at the airfield.
See on the map there is a mission at the airfield, quite some kilometers away.
Normally your quad would try to fly to that first waypoint and execute the mission if you happen to activate Auto mode. The fence will keep that under control, at least the quad will only go as far as the fence will allow.
That was the mission I tried last weekend. But the copter won’t take off at all. Is it recommended to always delete the mission uplaoded in the quad? So if you mistakenly flip the switch to Auto, there is no mission to execute?
Yes probably good practice to delete unused missions. Load and recheck the mission once onsite with the ground station.
Rally points however… ![]()
You can have them dotted all over the countryside as known safe landing spots and there’s a couple of Rally params that controls how a rally point is chosen as a landing site.
Having a geofence with RLT or SmartRTL set, even if it’s for 500m (or something further than you normally fly) will keep your quad from flying across town if you forget about that mission from last weekend.
1 Like
I will definitly do that. Thanks. I will never be able to figure those myself.
The settings you gave me made a big difference. Thanks a lot. There are still a lot to learn on Arducopter. But I am enjoying it.
I have another 450 Quad frame. Any recommendation on the Motor, ESC, Props and Flight Controller?

Yes, put on the oldest roughest looking old-school parts that are no longer usable and hang it up on the wall like artwork ![]()
Bonus points if you can make it look a bit steam-punk
1 Like
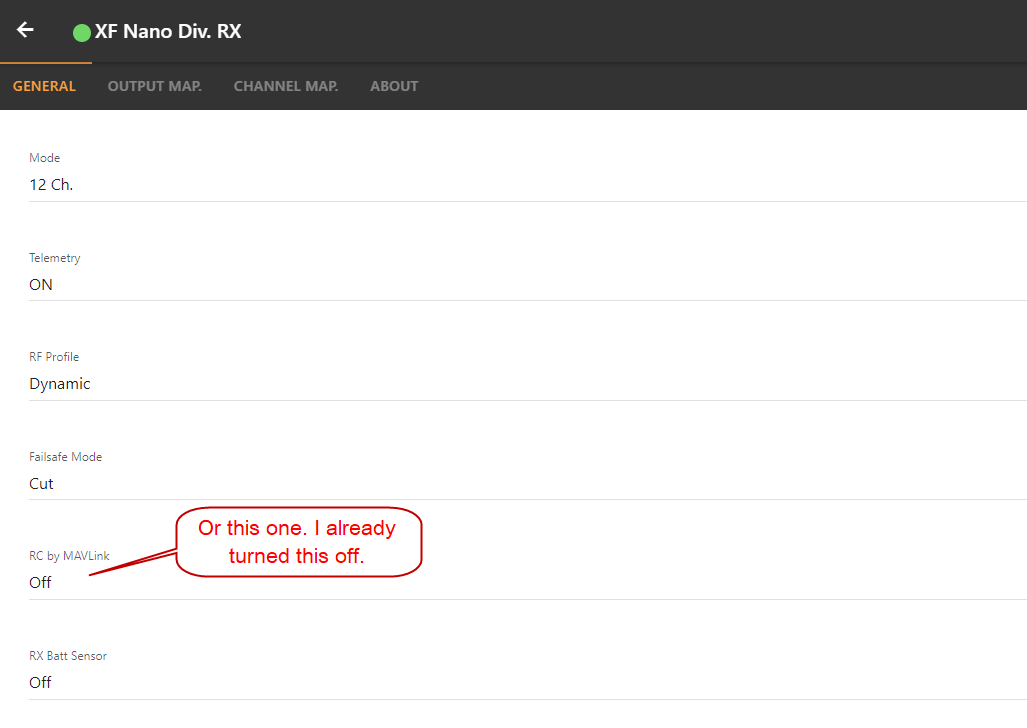
Turn off RC by mavlink, it’s essentially incompatible with regular RC
Hi @andyp1per
I did not intentionally turn RC by Mavlink so I don’t know where to tun it off. I think it was on by default or I might have turn it ON without knowing what it does. Can you give some steps on how to disable it?
Is this the one?
Regards,
Carlou