On the Nano RX (the second photo).
I had a lot of fun flying this QUAD today at the airfield. No complain at all. Very stable and very agile. I am not yet up to speed in analysing the logs (Graphs). Would somebody have a look at the logs below and comment on the performance technical of the quad? I’m more interested on the bad side of the logs so I can find ways to improve it. One of the logs is a successful mission. It’s a very simple mission this time just to have a feel on how autonomous flight is. We’ll create a more complex mission next time.
https://drive.google.com/file/d/1swx02W2mumNdzRgr0Hte-nFvkN_4atRV/view?usp=sharing
https://drive.google.com/file/d/1wXkcytTpKFI6Yqeo99lnPoaCoJrTaWDa/view?usp=sharing
https://drive.google.com/file/d/1qeSgpBsDZFFmQ-0HzRTsxgXf-6uLoPw7/view?usp=sharing
Thanks again to everybody who contributted in the successfult completion of this QUAD. It is my first quad.
That looks really good! The tune looks really dialed in.
The only things I see are slightly higher than desirable vibrations. In the Y axis, so horizontal. Make sure you don’t have anything pulling on the flight controller or wire bouncing on the controller. Check to make sure every thing on the airfame is secured.
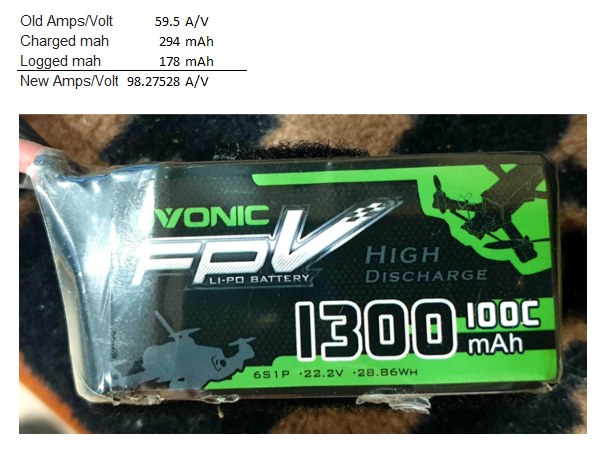
How big of a battery are you using? I couldn’t gauge from the current totals so maybe a current calibration might be in order. Easiest way to do that is start with a fully charged battery. Fly for a few minutes, enough to get a noticeable draw down on the battery. Make note of the total amps (mah) drawn on the GCS or use the log later. When you charge the battery keep track of how many amps (mah) the charger “puts in” the battery. Adjust BATT_AMP_PERVLT as required. The formula is New Amps/Volt=(Old Amps/Volt * Charged mah)/Logged mah
But really, that’s minor stuff. Go fly and enjoy your build!
I am using this battery. I have also updated the Amps/Volt based on the calculations you provided.
I have a digital Ammeter to calibrate the current but I need to change the connector from XT90 to XT60 before I can measure the actual current draw of the drone.
Regarding the vibrations, that will be my task next week to look where that lateral vibration is coming from. Thanks for the analysis.
Can you share how did you come up with the analysis that the tune that is dialed in. I want to learn how to interpret the logs if possible. Might be a good troubleshooting tool in the future.
Don’t worry about that. Use the math a couple of times and you’ll get it within a few%. You really want the current load in flight and testing that on the ground is sketchy. The built in ammeters are useless on the ground so don’t worry about low level draws before you’re armed.
That’s harder. I know when I started I was looking for a guide and there isn’t really anything other than the wiki explaining how to access the logs. I’ll tell you what I did, I lurked around here for ages and followed threads where others were analyzing logs. I would download the same logs and try to find what they were looking at. It helped me learn a ton about ArduCopter and ArduPlane, as well as how to dig into the logs. Look back at who’s commented on this thread and you’ll see several of the users that I learned from (and still do) and I would recommend following their work. Start with the basics:
- Tune (ATT.Pitch vs ATT.DesPitch, and roll and yaw),
- Battery voltage and current,
- vibrations, and clipping levels.
- motor outputs (RCOU.C1 … C4), and RC inputs (RCIN.C1 … C4).
- Nav performance (Compass, Baro, GPS)
I’m sure others will have their hot list, but I find for me those will tell me a lot about what a quad is doing.
Mission Planner is probably the best too to start with. Once your head is in the game then MavExplorer is a powerful tool, but that comes with it’s own learning curve.
Hi mate,
Thanks for all the info. It starts with small bits and pieces and guidance like this to crank the head and learn new stuff. I will follow your advice and walk my head around the technology. Very interesting but cannot be injected in the head for a day or two.
Regards,
Carlou
1 Like
Hi @xfacta and others,
Can I ask another favour? My GPS Mate arrived today and installed hoping that I can get away with the USB Battery brick work around in order to keep the GPS Fence lock. But apparently it did not help. The only help that this GPS Mate has done is to keep the GPS alive indicated by the PPS LED still flashing blue after you unplug the main battery.
The attached logs took a long long time to get a GPS Fence lock and I gave up cause when I arm the quad using the rudder stick, the HUD says its AMRED as shown in the video but the motors won’t spin. From the logs attached, the LOG_DISARMED = 1. Is it possible for you to investigate the log and identify where is the bottleneck stopping the motors from spinning?
Thanks again.
Regards,
Carlou
BIN Files
https://drive.google.com/file/d/1rJkwuNbCjmhx1sMPUxyCXGda7X2IyflG/view?usp=sharing
https://drive.google.com/file/d/1XmsrcAgW3rOnm3xq4Jw6pphP7YVXoKv1/view?usp=sharing
https://drive.google.com/file/d/17YpEljfHdLZG7ZhqLnyiC8fYnROmSmpv/view?usp=sharing
https://drive.google.com/file/d/1rsRzEWMMw8Gjixo0EjCcqPOno9krw5Sw/view?usp=sharing
Hi Dave, just to elaborate on this answer from someone elses perspective. I use my Arducopter aircraft on film and TV sets and the moment you land they want you back in the air again. On battery changing now I have to hot swap the batteries otherwise if I completely power down the time it takes to clear all checks is just too long. There’s nothing wrong in my setup and it is reasuring to a degree that it is waiting to get everything 100% before allowing the aircraft to arm but when you are stood there twidling thumbs waiting it to get ready on a tight schedule it can be embarrasing for me and certainly annoying for the client- even if it is only for 30 secs or so. Its amazing how slow that can feel ![]()
1 Like
From the 1st log the time it takes from power applied to the “EKF3 IMU0 is using GPS” message is the time you can expect. Keeping everything hot would seem to be the best solution.
Hi @dkemxr,
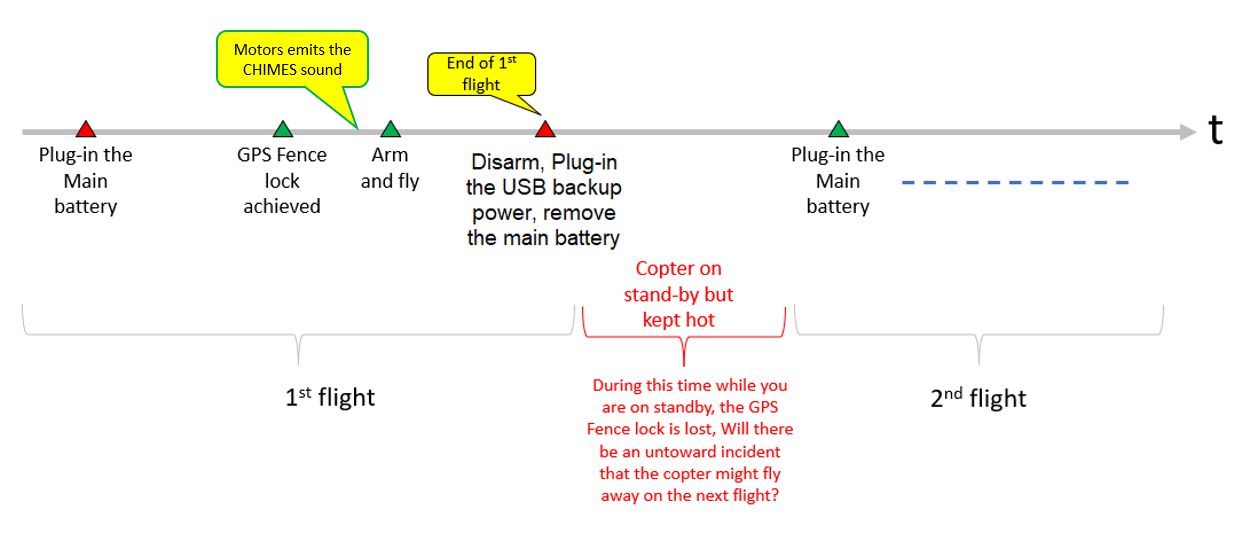
Thanks for your response. I you are right. The only solution to this is to keep the flight controller hot using a USB Brick to keep the FC hot. Would you be able to know if during the time the copter is on stand-by (Area in red in my diagram), the GPS Fence lock is lost for some reason, what will happen to the next flight? Is there a chance that the copter will fly away?
Looking at the 1st log, the FC showed a message “EKF3 IMU0 is using GPS” but the motors won’t spin after the FC is armed as shown in the HUD. Could this be fixed and change the message to refelct the real reason why the motors won’t arm? A bit confusing when you are looking at the messages in the HUD and the ARM tone/LED indicating that the copter is ARMED well in fact its not.

Regards,
Carlou
Sure it did, it’s in the image you posted.
Yup you are right, I missed it. I updated the screern shot so other users will not be mislead.
So what is the reason why the motors won’t spin if GPS Fence lock is already achieved?
@Developers,
Could the message be fixed to display the real reason why the motors won’t spin? Thanks heaps for looking into this.
I am happy to do some more testing and post logs if that will help. Just let me know what needs to be prepared (Parameter setups, Logs, videos etc,).
Additional info:
- You can only Arm and spin the motors after you hear the motors emit the chime sounds. In the case above, the motor chimes has not yet happen. Which tell us that the FC is still waiting for something else before it will do the chimes sound.
- Or maybe the FC is already really ready to arm the motors but the ESC is still waiting for something else. What should that be? What ESC parameters needs to be coordinated with the FC? This ESC is running DShot600 whrein calibration is not needed.
Use the USB battery brick solution. The GPS Mate only retains the lock in the GPS but not in the FC so don’t venture on the GPS mate at all. Its a waste of time, money and effort. With the USB Battery brick solution, there is no waiting time for the next flight. My only precaution and this is not technically proven is Plug in the USB Power and change the main batteries at the same location so the FC thinks it was not moved at all and GPS lock is available at that point. The reason I said this is that GPS Lock might be lost if you move the copter somewhere else. And what will happen next is; “Don’t know”. I’m hesitant to test. As long as the battery changeover is at the same location, I think you are good to go. It would be good if you can also update us with your experience.
It sounds like the ESCs are not able to operate for subsequent armings after the battery is swapped possibly because the control signal remains in place and maybe confuses the ESC.
Try setting
MOT_SAFE_DISARM,1
to see if disconnecting the ESCs signal when disarming allows them to restart properly when the battery is swapped.
Also most GPS units have a capacitor that allows them to retain enough info for a short time between powercycles to allow a fast bootup and position fix, so the first fix of the day will be slow, subsequent power cycles should be a lot quicker.
@xfacta,
The result of testing after setting MOT_SAFE_DISARM,1 did not make a difference but I can now see that the flight controller is sending signals to spin the motors but the ESC is not responding. The steps I did are:
- Set MOT_SAFE_DISARM - 1
- Arm the autopilot.
- The HUD, LED and Buzzer indicated that it is armed.
- The servo output of motor 1 – 4 respond to throttle inputs in Mission Planner
- But the ESC is not responding to the throttle commands
I have no clue why the ESC is ignoring the throttle commands. Any idea? Is the culprit here the ESC? What is the ESC expecting in order to listen to the throttle command of the autopilot? I hope this test will give us a clue on a solution to this issue.
I have disabled FENCE and GPS so I can ARM the autopilot inside the house.
I got frustrated and decided to restore a previose backup to see what will happen. After restoring the backup, the motors will spin when the autopilot is armed. Here’s the video.
But but but… when you change batteries, it will be back to the same problem that the Autopilot can be armed but the ESC worn’t spin the motors. I’m getting Crazy now…
Regards,
Carlou
Copter is back to the same issue after doing a couple of flights. So the solution I mentioned did not really fix the issue. I already run out of options.
Finally, I was able to find a workaround to always arm the motor (100% working) by:
- Turn on the transmitter.
- Plug in the USB brick backup power.
- Wait until YAPPU announces that GPS home is acquired.
- Plug in the main batteries. This time, the ESC will emit the ARM chimes and you can fly.
I suspected that the board voltage might be lower than the min threshold. I installed an external 5V power supply but this did not fix the issue. The external power supply is giving 5V exactly so the issue is not the board voltage.
It looks like after the GPS Home is acquired, plugging the main battery will send the info to the ESC that “YES” you can arm the motors. Crazy but it works all the time. And waiting time for the GPS Home is acquired is only around 1 min.
I don’t know if this is a software or hardware issue but this is the final solution I found that works all the time. I think I have eliminated the hardware issue by putting an external power supply but this did not help. Maybe software but I don’t have the skill to debug.