The solution of @dkemxr works using a USB Power Brick to keep the flight controller powered after you disconnect the main battery. I’ve just tested it and the motors can be instantly armed on your second, third… flight after plugin in the battery. But you have to carry the power brick at the pit area and connect the USB cable before unplugging the LiPo. Due to safety reasons, we are not allowed to carry the drone with the main battery plug in.
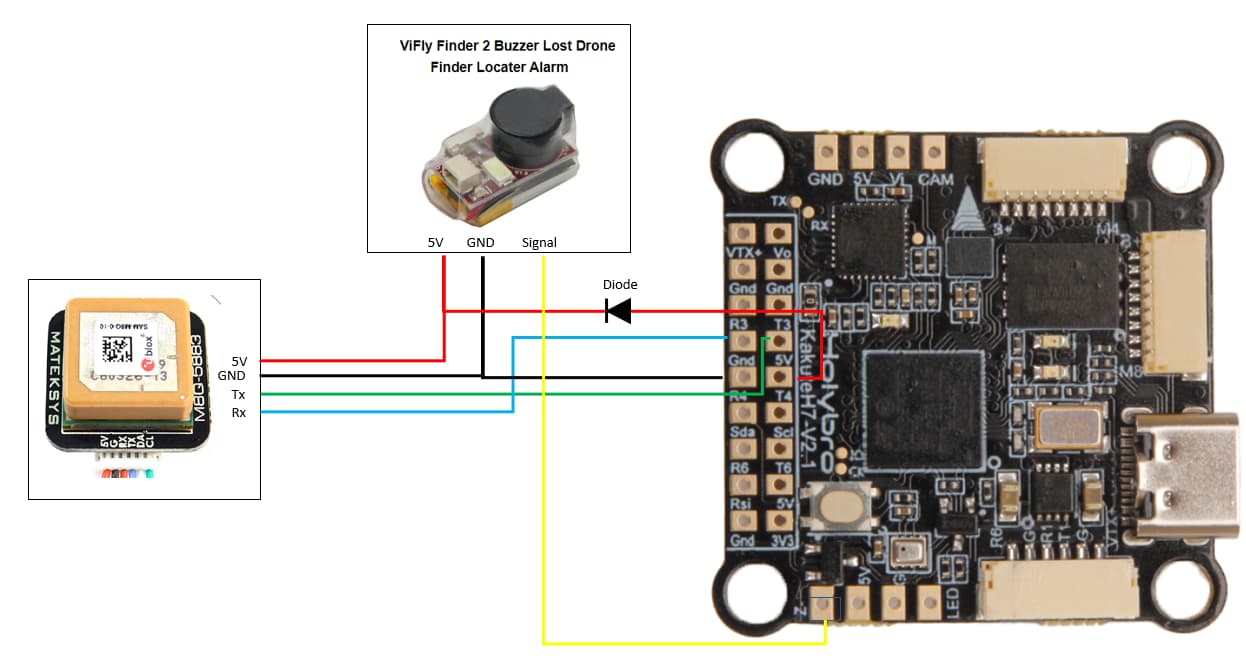
But I think I have a solution to it. There is a ViFly Finder 2 Buzzer Lost Drone Finder Locater Alarm. This unit has a tiny battery in it. Can I connect the GPS unit and the Buzzer Drone finder as shown.
This way, the GPS is always powered by the Buzzer Drone Finder unit even after disconnecting the LiPo battery. The diode is to stop the Buzzer Drone Finder unit in supplying power the flight controller.
Question:
Does the flight controller needs power to remember the take off position? If NO, then the diode has to be removed but I don’t know how long can the battery last to power the GPS and FC together.
When you go for your succeeding flights, the GPS has still the lock indicated by the PPS LED. Will the flight controller immediately be in the GPS Lock state? Or there is a waiting time.
Thanks for that. I only found the following issues:
When you fly till your battery failsafe triggers, the only way for you to clear the failsafe is to unplug the main battery. Do you know of other means to clear the failsafe?
When you finish flying, you turn off your radio. Wen you turn it back on on your next flight, the radio is not bound anymore.
I guess we cannot have everything. We solve one and other issues comes in.
First of all, I don’t recommend flying till a failsafe triggers. But if you’re going to continue flying, you need to put a new battery in any how so what’s the problem? The GPS-Mate is only to power the GPS module, not the FC so when you change the battery the GPS is still active but the FC will be power cycled and your battery warning will be re-set.
That’s a different problem. That shouldn’t happen.
When this happens, what are you doing to re-bind the radio to the RX? This sounds really odd. I’m running Crossfire on a few drones and I’ve never had that issue regardless of the order I turn things off or turn things on.
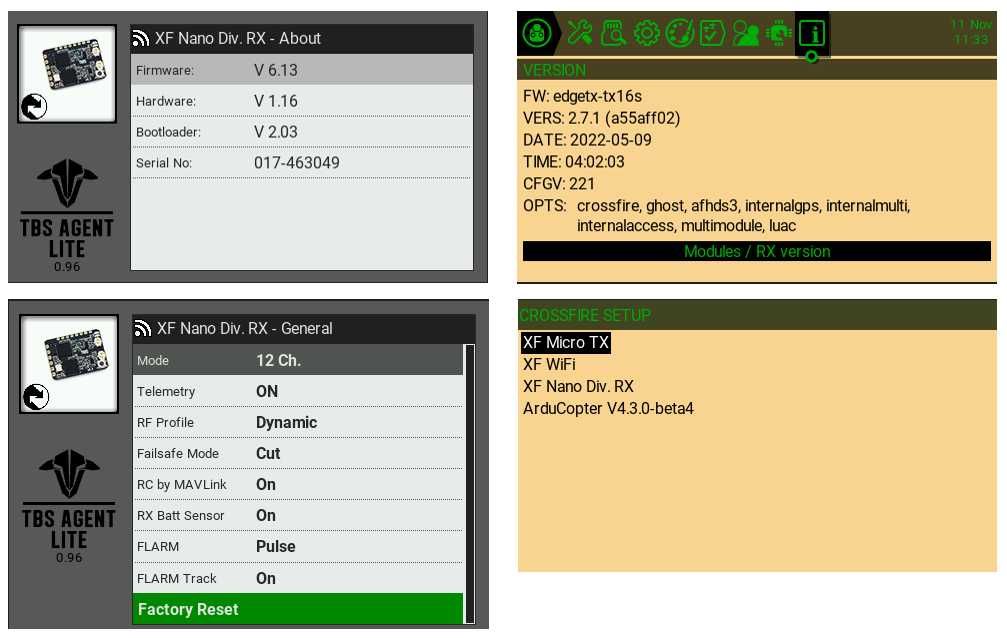
What firmware version is your crossfire gear on? Are you using model match or multibind? What radio and radio firmware are you using?
You can check the other Fence params to see if they suit you and local laws.
Mainly you just want to check FENCE_ALT_MAX and FENCE_RADIUS, the default values are reasonable in most cases, especially for testing or until you run long missions.
Actually I tried setting up a simple mission last week at the flying site. Its just take off and then go to two waypoints and land. But after I arm the copter and then flip the switch to AUTO in my radio, the blades will spin and then immediatly disarm without even taking off. Did I miss a step? I’m dying to see a mission happen but did not succeeded.
You didn’t answer my other question: What are you doing to re-bind? Are you having to press the bind button on the RX each time? Are you having to trigger bind mode in Agent lite each time? How do you know it’s lost it’s bind? Please elaborate on that.