I have built an f450 drone with pixhawk, and I am having some issues with it. With a fully charged battery, it flies fine, without any issue. But when the battery goes around 40% or lower, the copter is having issues. If the copter is in the air, it starts to crash into the ground in a controlled way. It stays level, but it does not react to the throttle input, even if I change the flight mode. After it has crashed, I am able to arm again and take off, but after it reached 40-50 cm, the same happens.
I am using a ZOP Power 11.1V 6000mAh 45C 3S battery.
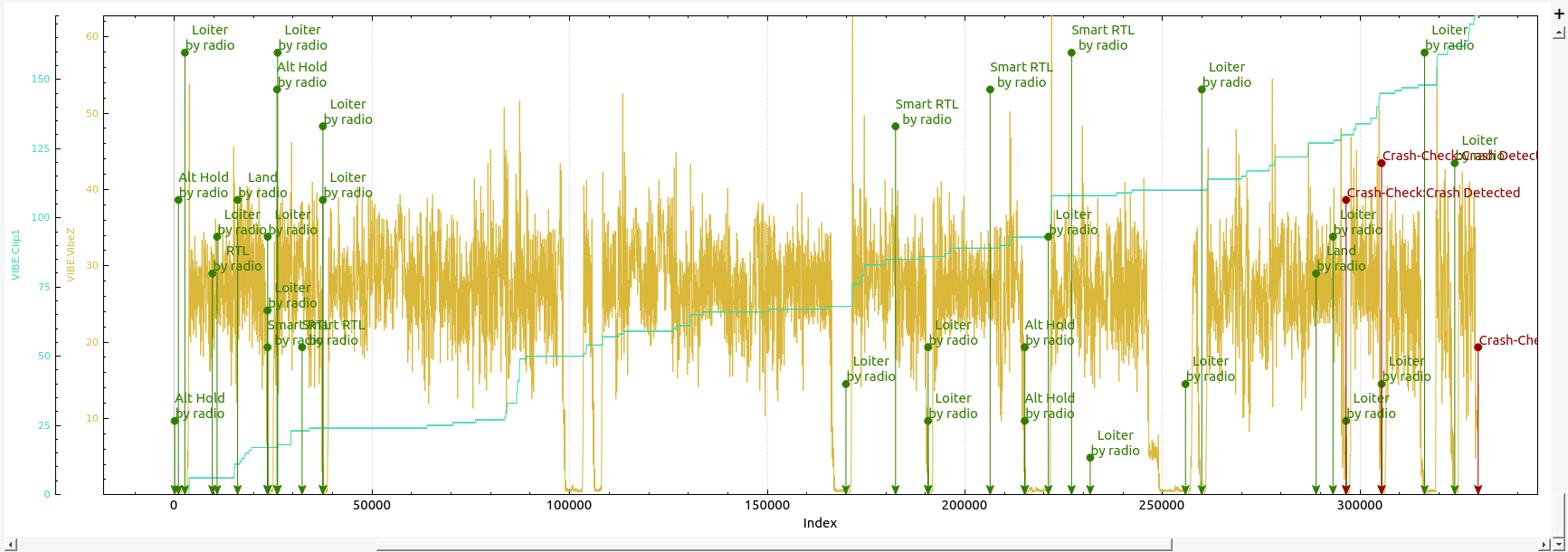
Here is the log (the copter crashed 3 times with this issue at the end of the flight):
Thanks for the reply. I have fixed the vibration, the range is now withing accepted parameters. Clipping is gone as well. I flew again today, and when in Smart RTL mode, it crashed into the ground again (at 17:44). I am not sure what is the issue this time.
Looks like its under powered/overweight to me. Graph the RCout’s, 2 motors are ~225 at hover. It should be closer to 180. Describe the craft and it’s all up weight.
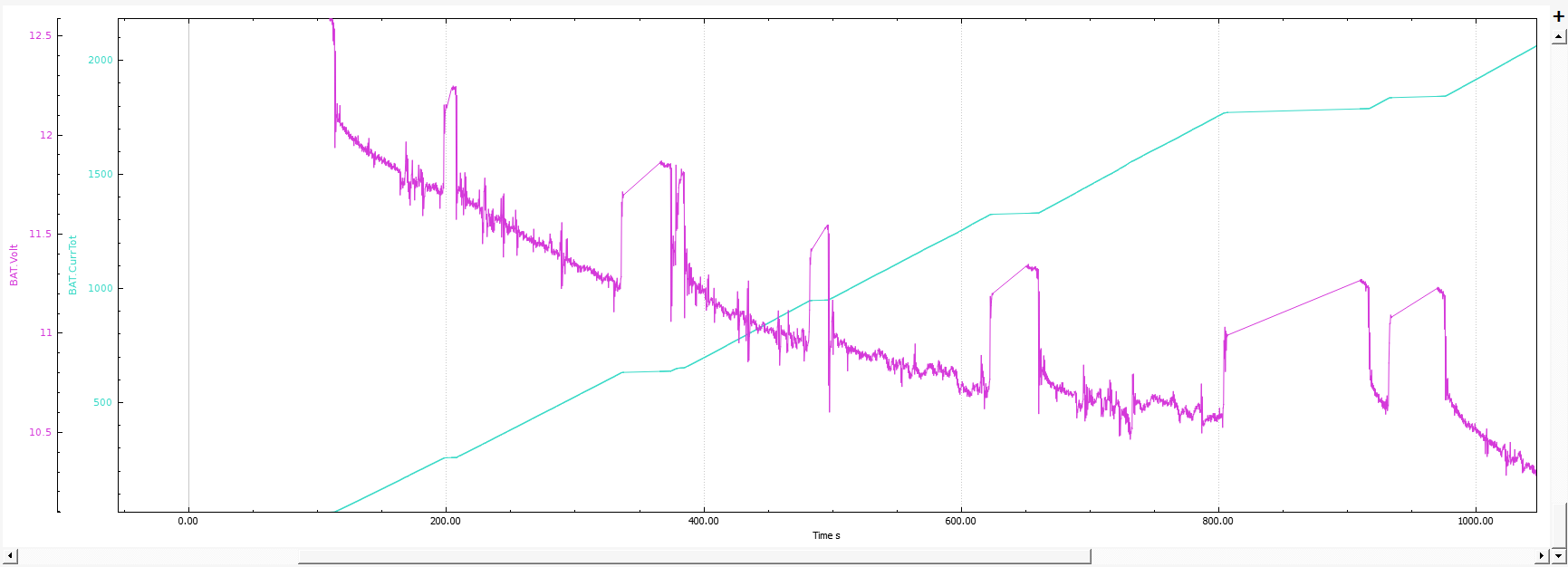
Is your power module calibrated for current? Because the log shows it only supplying 2170mah when it has sagged to 10.1V.
@dkemxr i agree with underpower but i don’t think a 4s battery is needed
I have same as this config with 30a current using this copter using only 10a at all
I think there is a problem with ESCs or a half dead battery
Internal resistance is 6.1 mR for cell 1, 6.5 mR for cell 2, and 5.0 mR for cell 3.
I have a 4s Turnigy battery, which will arrive next week. I will try the copter with that.
If the issue is with the ESCs, how can I test that?
Use Dshot 150. You may have to turn off Low RPM Power Protect" from BLHelisuite. Or it could be OK with 980kV motors. If you get no thrust then it will have to be disabled.