Okay, will try that as well. Thanks 
Hopefully it will help but I think you will be better off with 4S. At 3S with that setup and weight mid throttle is ~62% (theoretical). As Hosein says this isn’t terrible and can work but you want it close to 50% for best stability and control.
I haven’t looked at your log. I can tell for your flight description that you are under powered. I know because it happened to me after I “upgraded” to lower kv motors to use a larger prop in the hopes of gaining a little more efficiency. I did gain some flight time, but found out the hard way that after a long flight things can go bad on landing. First time it was landing in Auto after a long mission and it was descending to fast and oscillating which made it descend faster. I switched to alt hold and applied full throttle which had no effect. Broke my landing skids and bent my gimbal. Logs showed throttle at 100 %, but the oscillation and need for extra power to slow the descent just wasn’t there. I am going to 6s instead of 4s batteries which will give the 340 kv motors the thrust they had at 4s with the old 580 kv motors. I will never fly below a 50 % throttle hover point again. You can maybe get away with it for a while until that long flight on a windy day.
Yes, generally agree, design for 6S and a lot of these problems go away. But you have to pay for 6S capable components. The generic F450 frames are pretty much crap no matter what you do but you get what you pay for. I have had a few.
You also might want to checkout e-calc
https://www.ecalc.ch/calcmember/signup.php
With comparable motors (hobbystar) e-calc shows your 3S setup at 1500g with a 1.6 to 1 thrust to weight ratio which is way underpowered as a 50% throttle would be 2 to 1.
Also at 4s it shows plenty of power (2.5 to 1 thrust ) but also that you’d be right up against the motors maximum power, which makes overheating or losing motors possible.
One easy alternative would be a lighter battery
Thanks for the info. So, if I use a lighter (4000 mAh) 4s battery, with the gimbal + camera, I am still around 2 to 1 Thrust-Weight ratio with 1,8 kg, and with a flight time of around 8 minutes. Once I receive the 4s battery, I will test it.
Forgive me if this is too obvious, but I have to ask: What voltage do you have selected as your failsafe low battery level, and what mode do you have selected? Could be the copter is just landing due to voltage cutoff.
It seems that your esc’s are cutting out, check the low battery cut-off.
If you check voltage and current, right before the crash there is a sag to 10.5Volt, then current goes down and voltage goes up, indicates that the load on the battery decreased significantly.
I have tried the solutions above. I have changed to dshot150, disabled low battery cut-off in the esc’s, and used a 4s (4000 mAh)battery. But with these settings, the drone shakes a lot while flying. The entire frame is shaking really hard. It does not affect the stability of the drone, but I am unable to fix the issue. I have checked the motors, the balance of the props, the frame, the settings, the logs, but did not manage to find the source. I have even reverted the changes, step by step, but the issue still persists.
The shaking appears on a 3s battery as well now, but it is much more violent when using a 4s. I did a short test hover today with a 3s, and I have attached the log.log_31_2019-9-22-17-29-36.bin (610.8 KB)
Also, here are the esc settings:
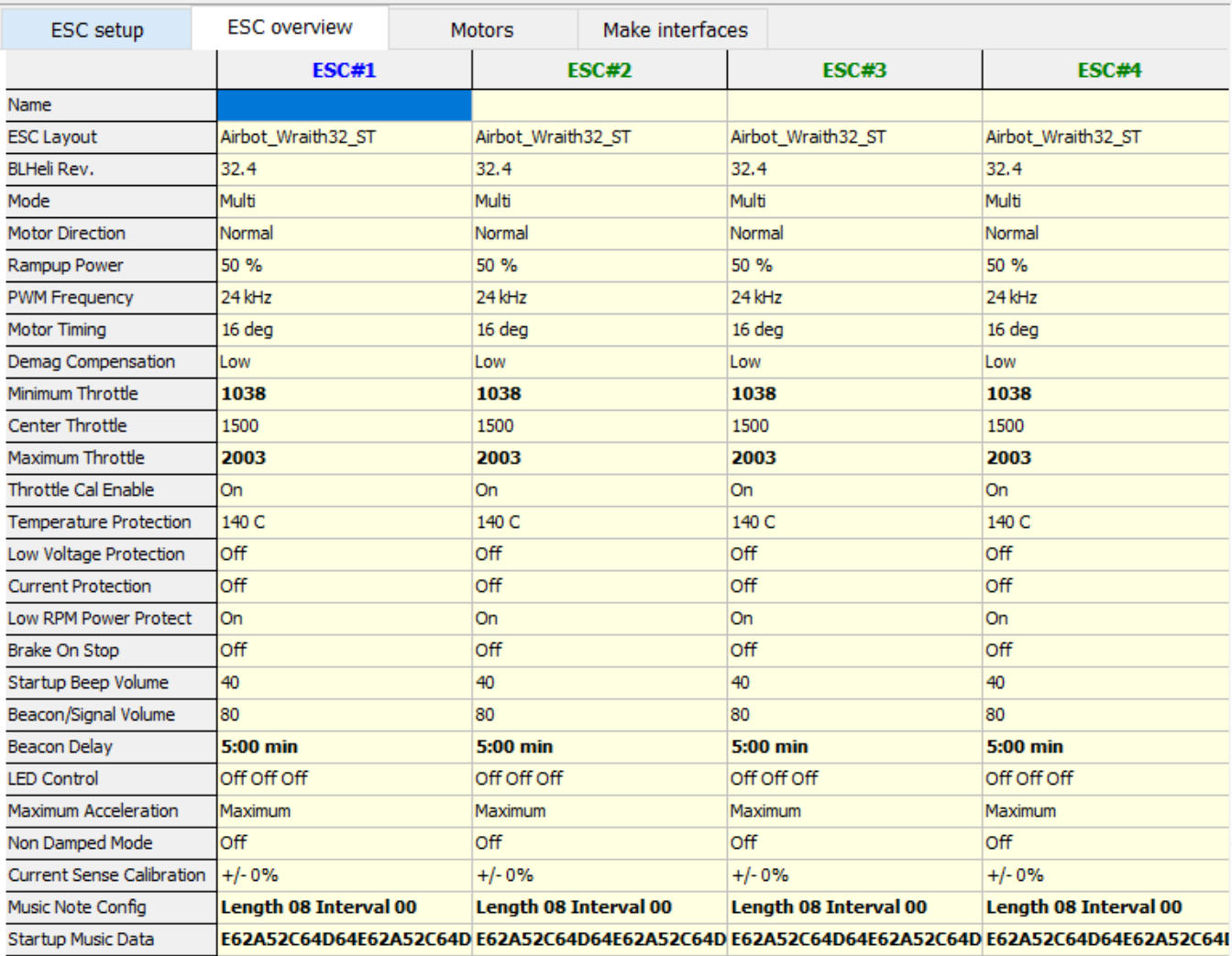
What can be the issue here?
yesterday i reset to default setting on of my copters and i was have same problem of yours
reset to default setting again
setup everything again
do everything in this page step by step
http://ardupilot.org/copter/docs/tuning-process-instructions.html
your shaking problem and under power will solve
The tuning did helped, now it flies relatibly stable with a 4s battery. Will do some additional tests later, but hopefully, it will be good now thanks
Ok now do a test flight with stabilize, althold and loiter and try to have fast roll and pitch in althold and loiter then send log file for analysis
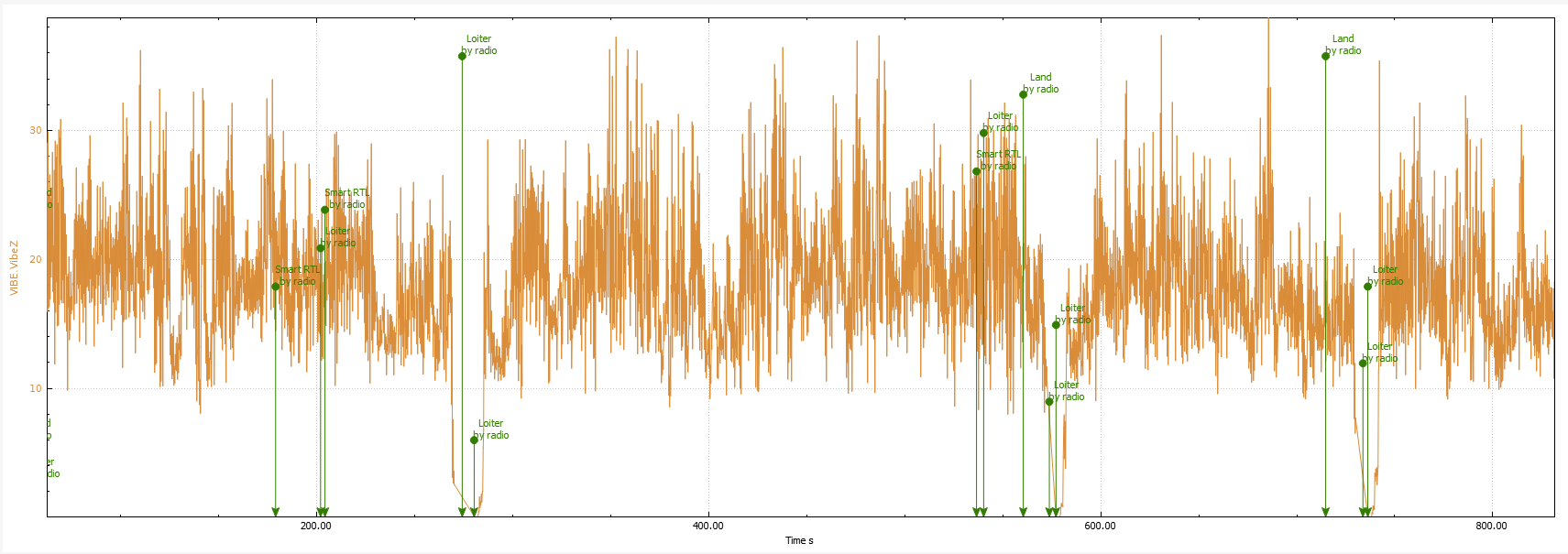
I had a test flight today, and the results look good. I had a 13 min flight with a 4000 mAh 4s battery. The copter was stable in loiter mode and smart rtl worked fine as well. I will test alt hold and stability in the next flight as well.
Here are the logs:
hi @Akos_Makovics
everything looks good in your log but your z vibration is a little bit high you will have no problem for flying but if you install gimbal and camera on this craft you will have jello effect on video
Hi,
Okay, thanks for the input! There where high winds, maybe that caused it? But still, I will try to reduce it