Copter-4.4.0-beta4 has been released for beta testing and can be installed using MP or QGC’s beta firmwares links or alternatively it can be manually downloaded from firmware.ardupilot.org.
Changes vs the previous beta are in the ReleaseNotes and copied below:
What’s the difference between RNGFND_FILT and SURFTRAK_TC? Which one would be better suited for smoothing bumpy flights in Auto mode when using a rangefinder?
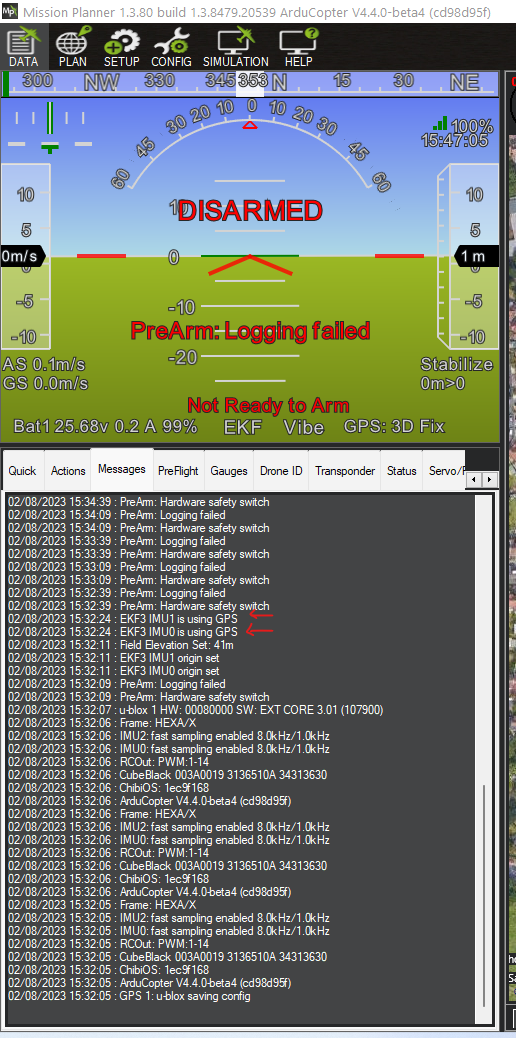
I’ve been testing v4.4.0 beta, but I am unable to armed my copter and I am stock of finding the culprits. Below is the screenshots but not sure if the red arrow is the source? Could you kindly check my logs please. Thank you!
To reduce the response to the rangefinder during terrain missions in Auto mode I think it would be better to adjust SURFTRAK_TC rather than RNGFND_FILT. The difference is:
SURFTRAK_TC filters the estimated altitude above the terrain
RNGFND_FILT filters the rangefinder distances
There’s really no difference when the vehicle is not moving and level but there will be subtle differences when the vehicle is moving and accelerating.
@rmackay9 I don’t find any custom action in the script if any lost motor.
mission planner has option that in HUD that it will display potential thrust loss including which motor was failed.
what is this new script will differ from normal mission planner potential thrust loss.
what is the custom action here?
fine. sorry to ask here about category 4.3.7 about Geo fence action behavior’s changed?
loiter mode fence action not hold the before fence instead it do RTL in both MAX altitude fence as well as MAX Range fence.
There shouldn’t have been any changes in the fence behaviour and I’m pretty sure we have an autotest to protect against the stopping-at-fence behaviour from being broken. Are you sure that avoidance was enabled?
Thanks for the report. I’ve just tested Loiter mode in Copter-4.4.0-beta4 and it stopped at the altitude fence and at the polygon fence.
If you could check with Copter-4.4.0 (not 4.3.7) then I’m happy to take a look if you’ve got a log. Simply setting AVOID_ENABLE=3 and FENCE_ENABLE=1 should be enough in most cases.
Had some issues when uploading firmware firmware was hanging. I think it was a com port issue on my end. Thanks for EVEYTHING YOU GUYS DO!
I moved to a different com port not the one on my external drive, rebooted the PC and ran a older copy of Mission Planer. Assuming something to do will the external drive. Installed now.
My first flight. I think Yaw is over correcting turning the craft left and right. feels off from the way it was before the upgrade. after lift off the craft starts turning right when I try to straighten it out it turns left. Almost like it can’t go straight when flying. Yapuu seems to be responding wrong with a tons of bad verbose, like motors armed, motors disarmed fence enabled all in a quick string.
I think the best way to describe YAW is a hat dance via user correction.
I noticing some higher than normal x vib possibly the FC is a tad loose. also can go down to 9" props and check the mounting of the GPS. Meaning it could be just hardware.
Hi all, did some fine tuning and fell back to stable temporary. fly’s well I did a VTOL quicktune that I could see Yapuu report it to work everything but the last save string message. User reported that he did not see his save. All the other functions show as it runs the PIDs