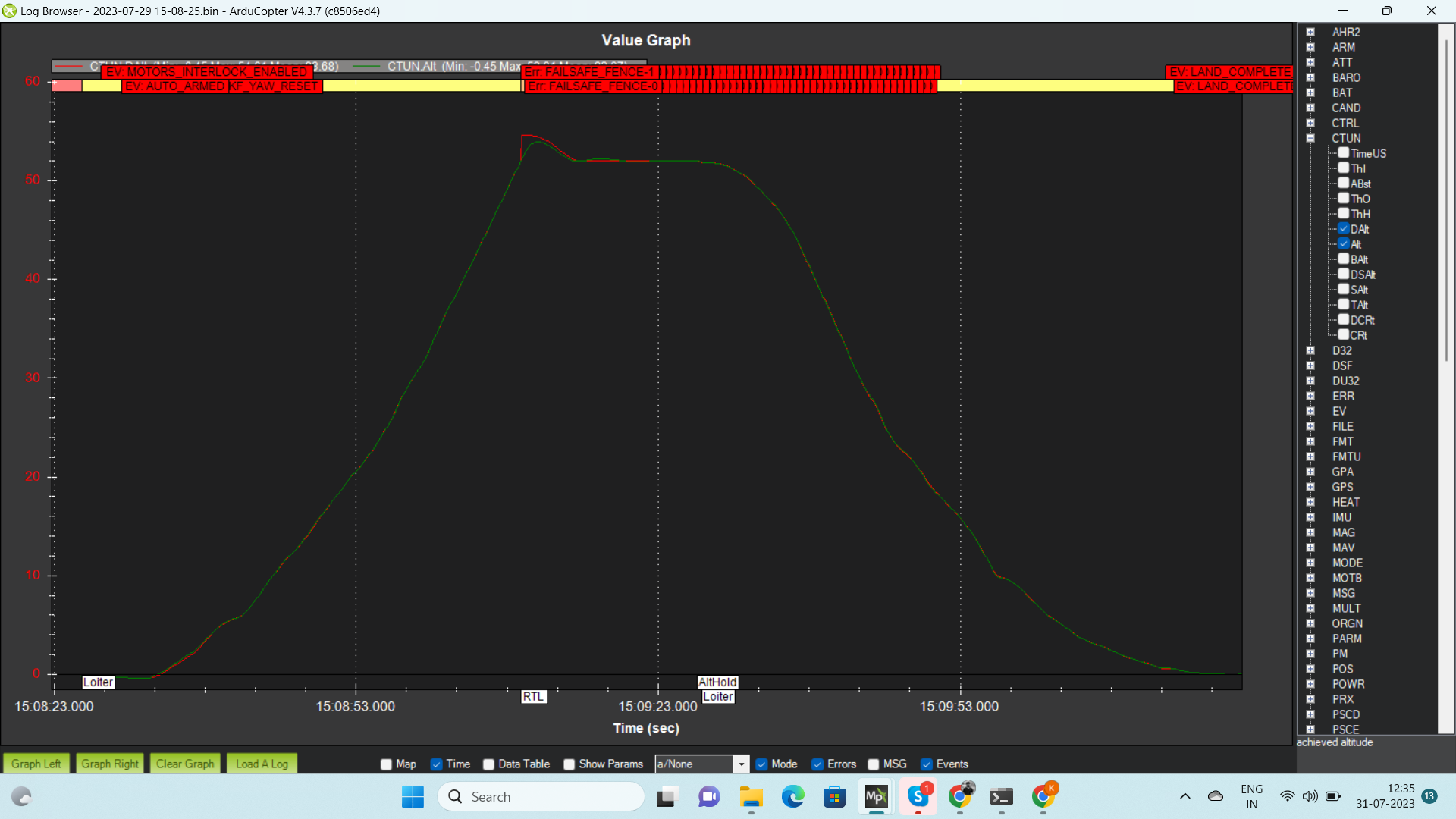
Aa per above parameter setting i have tried in loiter mode altitude increase to 50m and above it went above 50m altitude amd triggered RTL. similarly for max range also went above 2000 m and triggered RTL.
But i remember that in manual mode previous firmwares it will not cross the limit and stops before 2 meter as fence parameters configured.
Auto flight mode only trigger RTL in old firmware if fence breached.
But in this latest firmware loiter mode also gets breached instead of stop before the configured fence parameters.
Your thoughts @rmackay9@xfacta
Sounds liek you might have had “Brake or Land” set.
As far as I can see the fence actions havent changed in a long time, nor have the defaults. In 2019 SmartRTL and Brake were added. There’s been some code clean-up and some minor fixes and clarifications, but no changes of action or methodology.
Rover can do Hold.
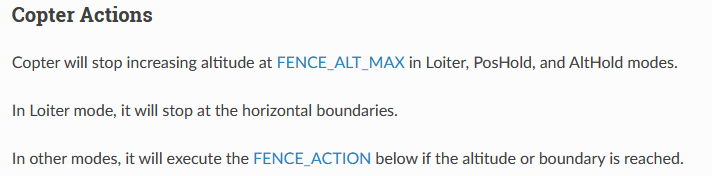
Here he was tried increase the altitude by increasing the RC3 channel but due to fence enabled and fence action set to 1 its not climbing beyond the fence_alt_max height.
But in my case it doing RTL instead of hold.
Even i too tested this function in previous old firmwares it was not like what now happening!
In Loiter mode I could NOT make it do an RTL or breach just by pushing against the fence radius or altitude. I just could not exceed the fence boundary.
In AltHold mode I could breach the fence radius which caused RTL, but could NOT breach Altitude.
In Stabilise mode I could breach altitude and radius, which initiated RTL in each case.
That is the behaviour I’ve experienced in the physical world when testing RTL and Fences.
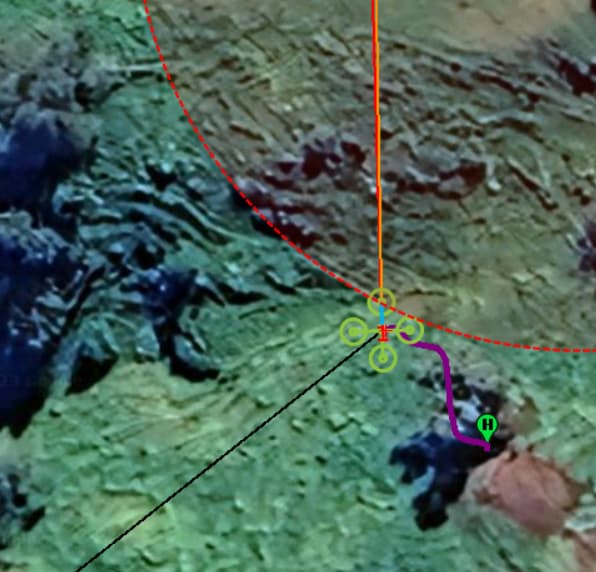
I just checked a stay-out fence and OA too.
I used OA_TYPE,2 and OA_TYPE,3
and in Loiter mode I could not enter the zone, the copter tried to slide along the side.
I had previously made corridors with altitudes too, and from memory that all worked as planned too.