Copter-4.3.3 has been released as the official/stable version and can be installing using MP, QGC and perhaps other ground stations as well. The firmware can also be manually downloaded from firmware.ardupilot.org.
Changes vs 4.3.2 are in the ReleaseNotes and also copied below.
Autopilot related changes
a) AIRLink LTE module enable pin and HEAT_ params added
b) CUAV Nora/Nora+ bdshot firmware (allows Bi-directional DShot)
c) CubeOrange, CubeYellow gets fast reset of ICM20602
d) MambaH743v2 with dual ICM42688 supported
e) PixPilot-V6
Attitude and Navigation controllers use real-time dt (better handles variable or slow main loop)
MAVFTP speed improvement including faster param download
Bug fixes
a) Analog rangefinder GPIO pin arming check fixed
b) Arming check of AHRS/EKF vs GPS location disabled if GPS disabled
c) CRSF gets RC_OPTIONS for ELRS baudrate to avoid RC failsafes
d) Null pointer checks avoid watchdog when out of memory
e) Position Controller limit handling improved to avoid overshooting and hard landings
f) Position Controller internal error after 70min of flight fixed
g) PSC_ANGLE_MAX param reduction causing WPNAV_ACCEL to be set too low fixed
h) Servo gimbal yaw jump to opposite side fixed
i) Siyi A8 gimbal driver’s record video feature fixed
j) SToRM32 serial gimbal driver actual angle reporting fixed (pitch and yaw angle signs were reversed)
k) Takeoff in Auto, Guided fixed when target altitude is current altitude
l) Takeoff in Auto handles baro drift before takeoff
m) Takeoff twitch due to velocity integrator init bug fixed
n) MAVFTP fix to terminate session error (could cause FTP failures)
o) IMU fast fifo reset log message max frequency reduced
Also special thanks to the developers and beta testers who contributed to this release including:
I think I didn’t include it because I thought it was too recent a change at the time we started the beta. Unless it is an urgent change, I like them to “bake” in master for a week or two before they are included in a beta release.
Thanks Randy for your work!!
passing from 4.3.2 official to 4.3.3 RC1, ELRS rx, lot of RC failsafe occurred.
According to this point:
c) CRSF gets RC_OPTIONS for ELRS baudrate to avoid RC failsafes
is there on 4.3.3 some parameter to be modified in order to aovid failsafe?
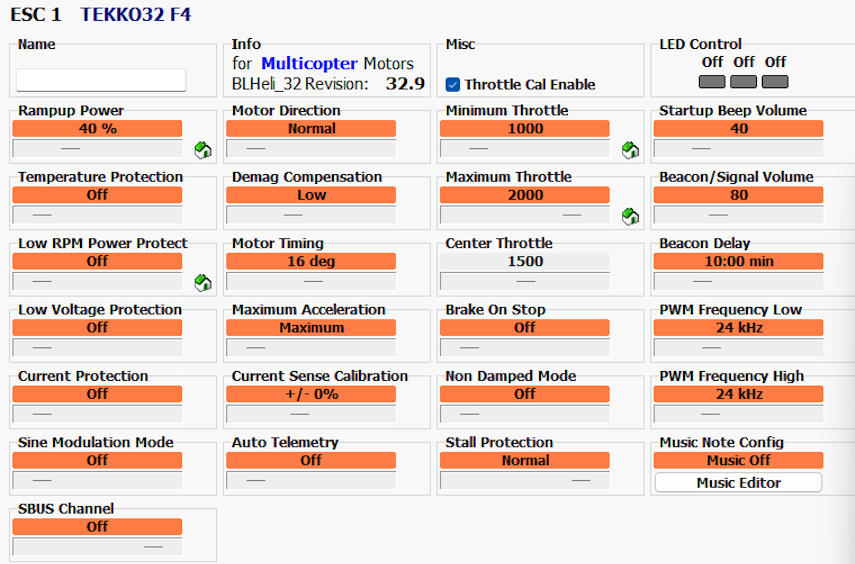
Great that its working! Auto telemetry should be off.
I have that ESC and passthrough generally works apart from on the first port (I think), so you might have more success with another output. I do not know why this would be.
Try moving all the outputs along one, so motor1 is on MainOut 2 instead of MainOut1 and so on…
I have the same with a CUAV V5 Nano - the first output doesnt do passthrough (or even DSHOT reliably) - reasons not known.
In Parameters this means SERVO1_FUNCTION,0 and SERVO2_FUNCTION,33 and so on.