WARNING: numerous reports of telemetry connection issues have been reported with this release. -rc2 will be released within the next 48 hrs with a fix so we recommend waiting for -rc2
Copter-4.1.0-rc1 has been released for beta testing and can be downloaded from the ground stations (MP, QGC) using their beta firmwares links.
The changes vs -beta8 are in the release notes and copied below
Enhancements
a) Log download speeds improved on F765 and F777 based boards (USB buffers increased)
b) Serial port DMA contention heuristics improved (reduces chance of delays writing to serial devices)
c) WPNAV_SPEED param changes take immediate effect in Auto
Bug Fixes
a) Airmode fix if throttle held at zero for long time
b) Auto mode SCurve jerk time calculation fix (prevents jerk from being set too high)
c) CRSF frame timeout increased to reduce RC failsafes
d) Declination automatic lookup rounding fix (caused inaccurate declination in some parts of world)
e) DShot (bi-directional) support on Pixhawk4, CUAVv5, CUAVv5-Nano
f) IMU semaphore fix to avoid occasional corruption
g) QioTek Zealot F427 GPIO pin fix
h) Replay/DAL RMGH log message format fix
i) Rangefinder initial buffer size and baudrate fix (affected Aintein US-D1 radar)
j) Surface tracking fix to reduce lag and overshoot
k) WPNAV_SPEED change with ch6 tuning knob feature gets divide-by-zero protection
l) WPNAV_SPEED_DN handles negative values
We still have some items on the 4.1.0 issues list but no blockers so I think we are very close to the stable release of 4.1.0. Any and all testing and feedback is very much appreciated!
In particular I would appreciate hearing from users of airmode and surface tracking. I just want to be sure that these features are working OK.
Thanks again for all your help with the beta testing!
After updating from beta 8 to rc1, Herelink (connected to Telem1) is not able to connect to the flightcontroller anymore. Neither the Solex app can connect nor a passthrough via UDP / UDPCl to Mission Planner works anymore. Half an hour before, I was connected through Herelink so I know that it was working right before the update from beta8 to rc1.
Mission planner (when using the UDP passthrough from herelink) seems to be able to detect the heart beat message, but when trying to read the parameters, it stays endless in the parameter reading pop-up.
I had exactly the same problem, although it occured with beta 8 at some point. I have posted it already on Cubepilot (one of the last replies), not sure if it is related to the recent herelink firmware
Yes, that’s right. this “-rc1” would have been “-beta9” but we decided to call it “-rc1” because we think it could potentially be released as the stable version.
ok, thanks for testing. Was BRD_SER1_RTSCTS set to 2 when it failed? If so that tells us it is the RTSCTS auto-detect.
The strange thing is that nothing should have changed in that code between beta8 and rc1. Are you absolutely sure it worked with beta8 with BRD_SER1_RTSCTS=2 ?
BRD_SER1_RTSCTS was 2 on both -beta8 and -rc1
Worked with BRD_SER1_RTSCTS = 2 on -beta8
Works now with BRD_SER1_RTSCTS = 0 on -rc1.
btw. with “rover-4.1.0-rc2” it is working with BRD_SER1_RTSCTS = 2 (Matek H743-Mini, MAVESP8266 with 230kBit). So I suppose it must be a special copter-thing?
Hi all, @tridge@rmackay9
I just updated to 4.1.0 rc1 and had connectivity problems with my herelink and also with a mavesp8266 bridge.
I boiled it down to the following problem:
With Arducopter 4.0.7, all parameters reset to default, the telem2 outputs heartbeats on boot.
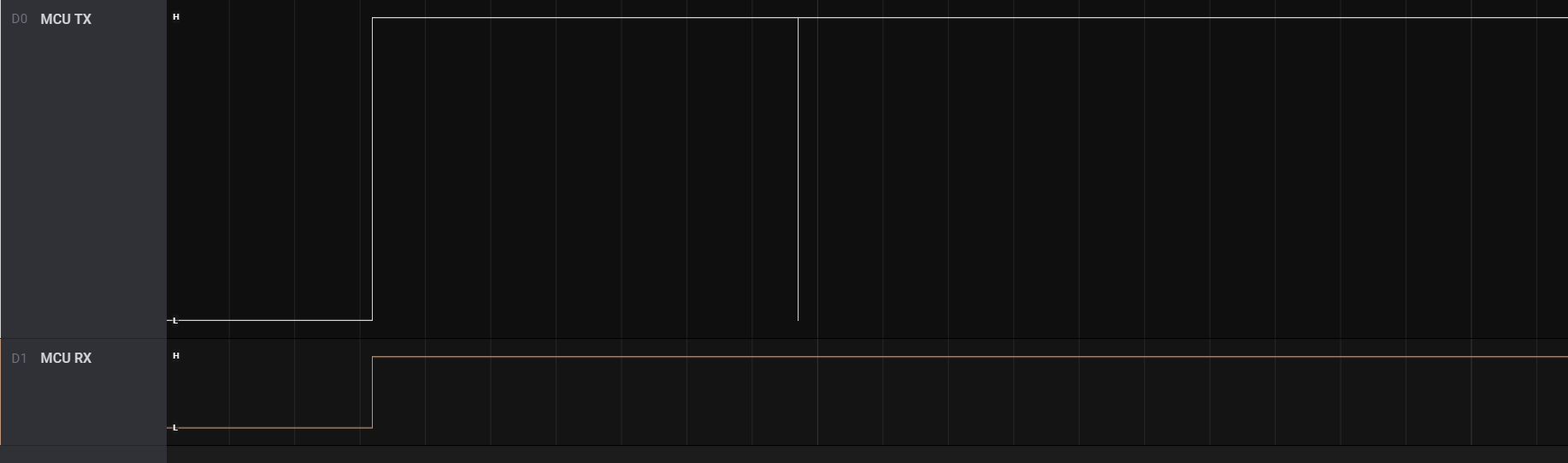
With Arducopter 4.1.0, all parameters reset to default, the telem2 does not output heartbeats on boot.
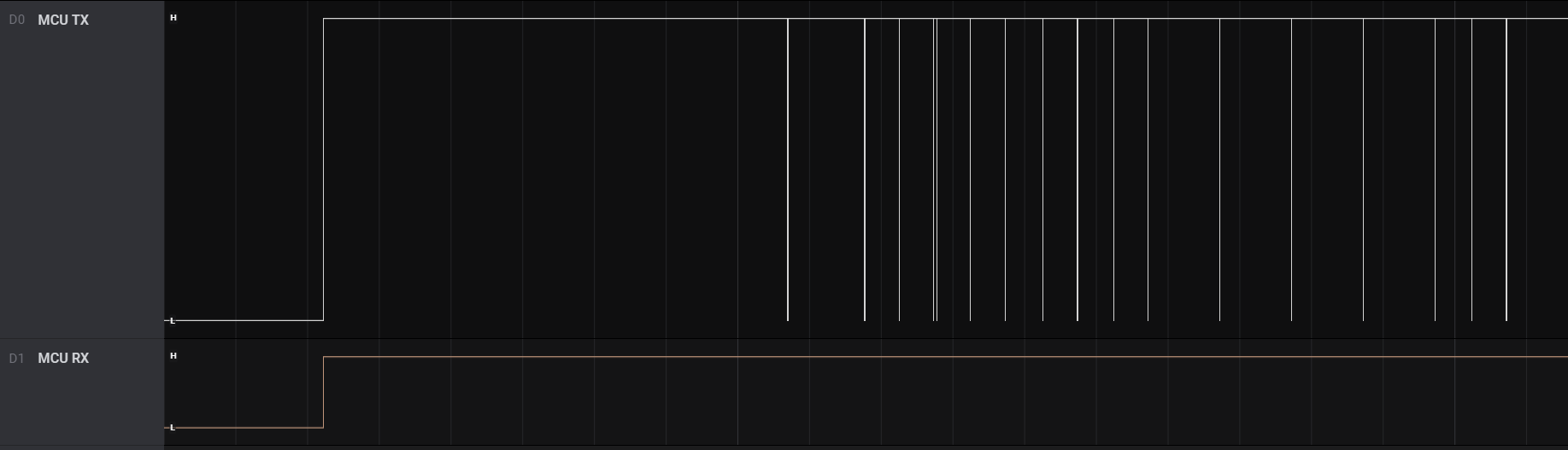
I confirmed this with a logic analyzer with just wires into the telem2 port, not connected to any device except the logic analyzer, see below:
4.0.7
I confirmed that the autopilot is receiving mavlink on those ports, as when I connect and disconnect to the port, I can hear the autopilot beep to indicate GCS failsafe going on and off. (Ready to fly and not ready to fly beeps as well as failsafe beeps) But no mavlink comes out of the port even when sending heartbeats to it.
After setting BRD_SER2_RTSCTS=0 on 4.1.0 the problem is resolved and the logic analyzer output looks the same as 4.0.7.
Is drift mode working? I am runnimg a Matek 743 Slim on 4.1.0 and when drift is selected my yaw and roll are reverser.I miss my drift even though I am prabably the only one on earth that uses it.
I know the DRIFT mode is a nice feature for stunning videoing without a gimbal. The latest GoPro’s have a HyperSmooth what makes that possible.
Hopefully it will always be available!