Copter-4.1.0-beta6 has been released for beta testing and can be downloaded from the ground stations.
Changes vs -beta5 are in the ReleaseNotes and also copied below:
Enhancements
a) ACRO_Y_EXPO supports negative numbers (-0.5 to +1)
b) GPS-for-yaw enhancements including using position and yaw from different GPSs
c) Guided mode acceleration control
d) Long distance travel supported (thousands of km) including double precision EKF and moving origin
Bug Fixes
a) Auto and Guided mode terrain following fixed (could impact terrain if terrain was very steep. see WPNAV_TER_MARGIN)
b) BendyRuler avoidance fixed (was slow and jerky)
c) BLHeli fix that could cause failure to boot
d) Crosstrack reporting fixed
e) CRSF message spamming and firmware string length fixed
f) Display re-enabled on 1MB boards
g) DShot always sends 0 when disarmed (protects against motors spin while disarmed due to misconfiguration)
h) DShot fix that could cause main loop jitter
i) DShot buzzer tone disabled during motor test to remove bad interation
j) Guided mode accepts position targets at high rate
k) Longitude wrap fix (allows autonomous flights as longitude wraps between -180 and 180 deg)
l) Log created on forced arm
m) MatekF405-bdshot NeoPixel LEDs re-enabled on PWM5
n) Precision landing init fix (if pilot took control, subsequent landings might not trying to land on target)
o) Serial port performance improvements using FIFO on H7 boards
p) TradHeli ground check of yaw fixed (yaw servo was not moving when landed)
q) Throw mode waits for throttle up to improve reliability
This beta brings us quite a large step closer to the official release so your help in beta testing is greatly appreciated!
As always thanks very much to those who tested earlier beta releases and reported back their experiences and issues. A lot of the fixes above are directly tied to this feedback so thanks!
Yes, that fix is included. In general everything that was merged to master before June 30th 2021 is included in 4.1 (and many things even after this date are also included)
Yes, EKF2 should work fine. I have not heard about the Emlid Reach issue so I would be interested in hearing some details about this.
There are some quite significant improvements to EKF3 in this release but I somewhat doubt they will resolve any problem you might have using the Emlid GPS.
This seems to be a problem with the Emlid Reach M2. Mauch Powercube 3 raises the voltage to 5.2 volts, which the Emlid doesn’t like. I have now connected it to a DC/DC converter, now it always boots reliably. I think this has nothing to do with Arducopter.
The error messages from the EKF3 were:
GPS1 not found
Beta 6 looks good, do you know if the final release will have the NTF_DISPLAY_TYPE working ? , Also just did 1hr test run with an x550 copter and the EKF3 works way better than beta 5 , this time it keeps position in loiter mode.
Thanks for all the hard work.
FYI… small Bug with pixhawk 4, FMU led for activity and error are crisscrossed, so it make you think that the FMU has an error on bootloader, the github bug report is #15739 opened on Nov 2020 seems that it was fine before 4.07 and 4.1b6.
Hi @rmackay9, I have found something different from beta5, in beta5 when I use gps-yaw, and set EK3_SRC1_YAW,2, the HUD show exactly the GPS module’s heading, but in beta6, It’s now showing the same GPS heading again, Is It right?
Thanks for the report. Sorry, I don’t quite understand, “It’s now showing the same GPS heading again”. The same as … ? If you have an onboard log that might also help. Txs again.
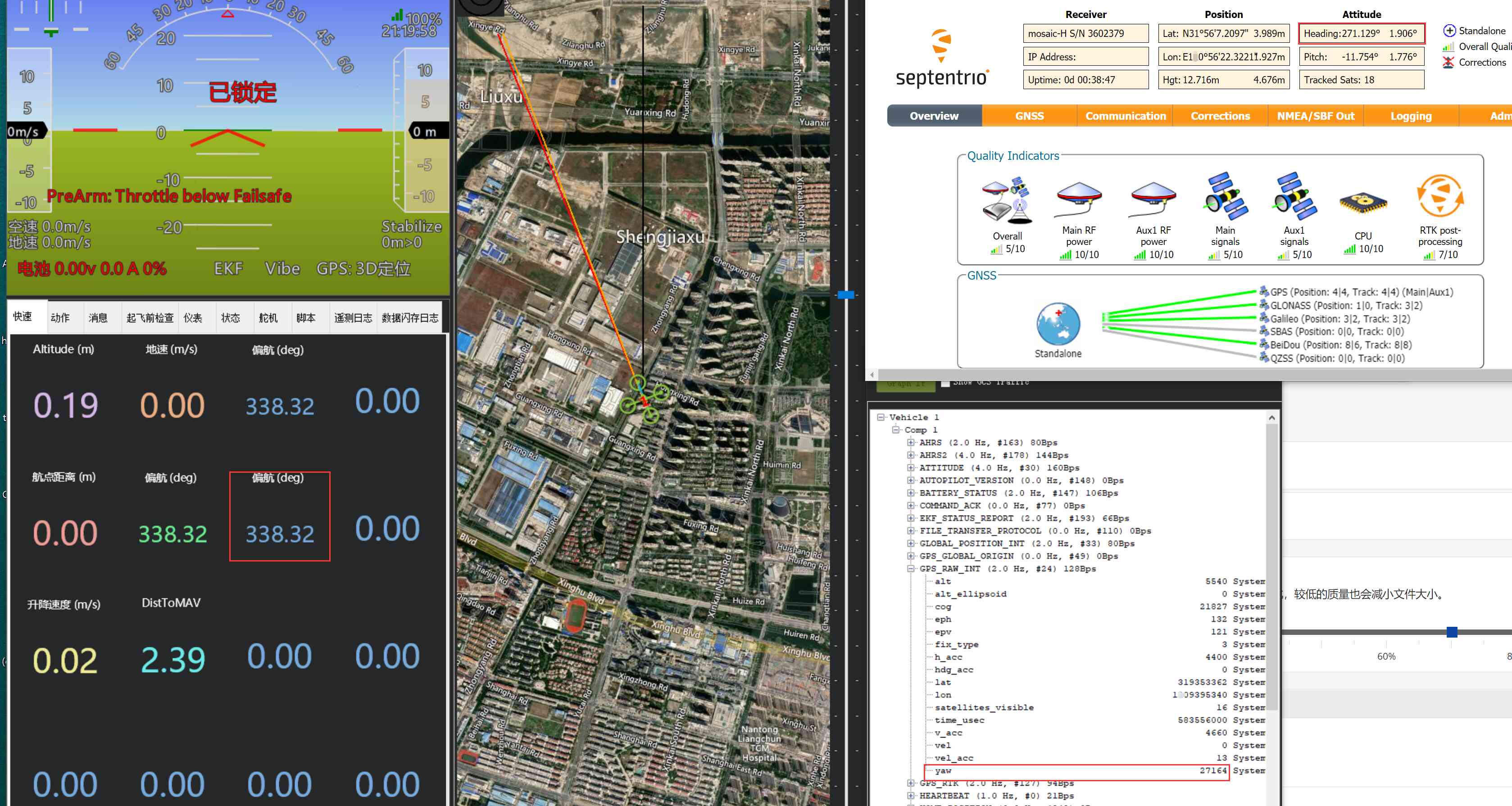
@rmackay9 Sorry for my terrible English, I mean It’s not showing GPS heading this time with the compass disabled.
1.It’s not a official ardupilot, I made some minor modifications, Here’s the link
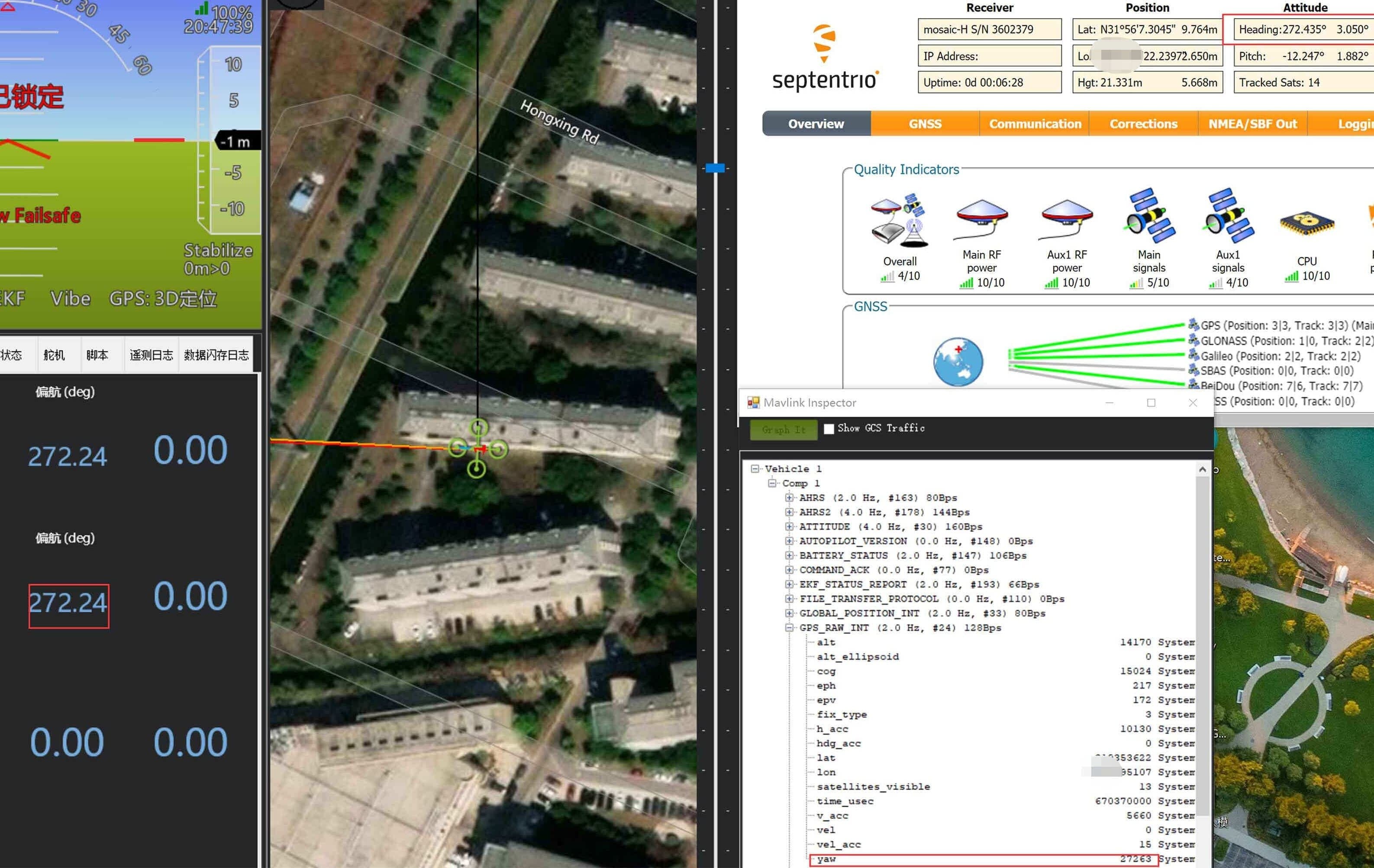
2.This is beta5 as you can see the yaw is use the GPS heading source.
So I guess you’re trying to test https://github.com/ArduPilot/ardupilot/pull/18172 that adds support for GPS-for-yaw using the SBF GPSs? If “yes” then I’m afraid this isn’t included in -beta6 so I can’t provide any advice really. It is probably best to comment on the PR. I assume you’re not the developer but if you are the developer and you’re looking for help then perhaps asking for help on the PR from WickedShell might be good.
Yes , I wrote the code, I know It’s not included in the beta6, so I modified it directly on your beta6 commit id, so I guess It’s kind of “beta6”, I’ll test it on nmea GPS on official beta6, and give you the feedback.
and thanks for reply so quick.
 , I wrote the code, I know It’s not included in the beta6, so I modified it directly on your beta6 commit id, so I guess It’s kind of “beta6”, I’ll test it on nmea GPS on official beta6, and give you the feedback.
, I wrote the code, I know It’s not included in the beta6, so I modified it directly on your beta6 commit id, so I guess It’s kind of “beta6”, I’ll test it on nmea GPS on official beta6, and give you the feedback.