This crash is similar to this other crash in that it’s the Crash Check that has triggered.
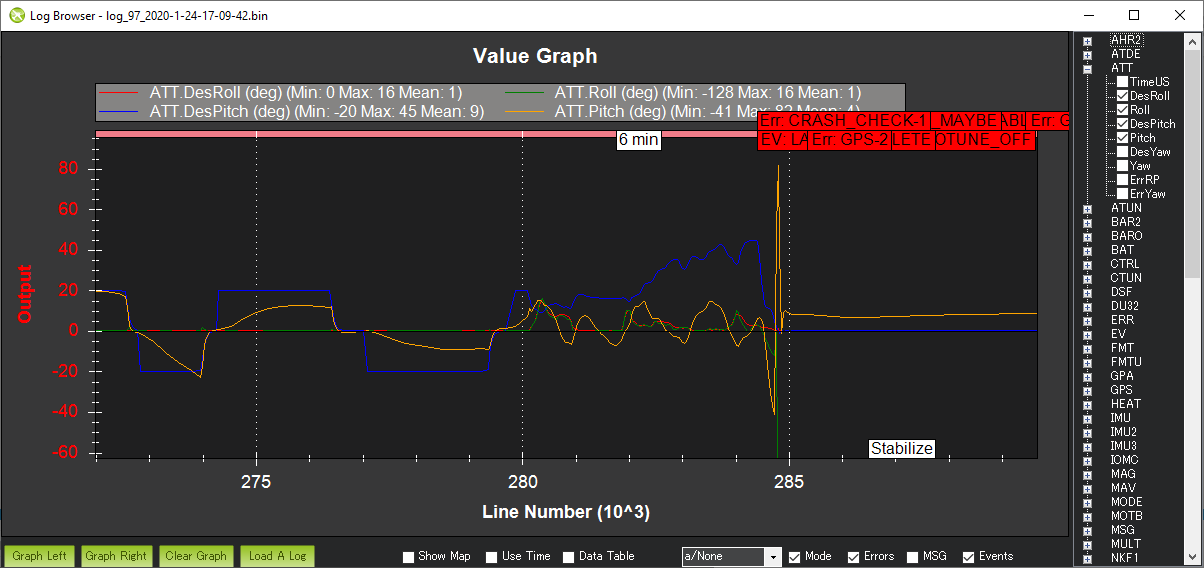
The graph below shows there’s quite a large deviation between the desired pitch (in blue) and the actual pitch (in orange).
Anyway, I think Leonard will comment on this one as well.