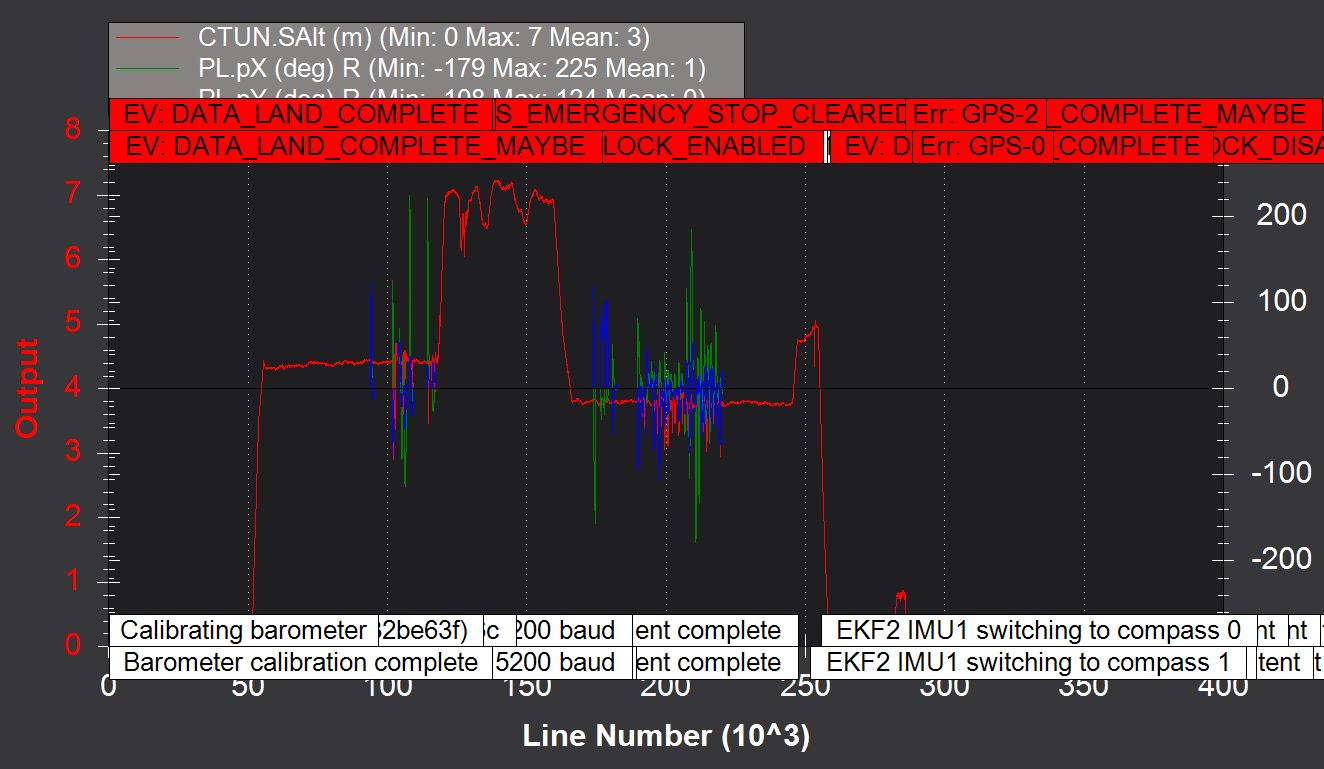
Hi @ThomasSFL I apologize, I could view it on one machine and on the other it seemed like there was nothing in the logs. The machine it did work on had Mission Planner 1.3.66 and the one it dint work on had Mission Planner 1.3.68 . I tried to read the log from the SD card directly on MP 1.3.68 and it still does not have any contents. That’s the only difference I can think of even in the image you posted it does show the CTUN.SAlt(MAX:7 and Mean:3) but its not plotting it on the graph for some reason I have posted a picture of TAcq and CTUN.SAlt reading from my rangefinder on my previous post. Let me know if you need me to take a screenshot of other params. Im not sure how else I could share the logs with you.
I don’t have access to the log, but it looks like it does have contents. In the Mission Planner log grapher, uncheck “Use Time.” It looks like the log contents do not have a timestamp, so the grapher doesn’t work if you have Use Time checked.
1 Like
The log is showing sporadic target readings from the sensor. This most-likely indicates that you do not have the sensor configured correctly.
Please double-check every step in the tutorial, and use Pixymon to confirm that the MarkOne beacon is being detected reliably. You should not get any false detections when the sensor is configured correctly.
Best,
Thomas
Ok I can re calibrate and test it out. Thank you
So I did some tests today and the copter just drifts off when I switch to Land mode. The log looks fine to me but I might’ve missed something (the copter drifted and ran into a wall on the first test). I’m using navio2 btw.
Your SAlt is only showing an altitude of ~1 meter. You should test at ~10 meters.
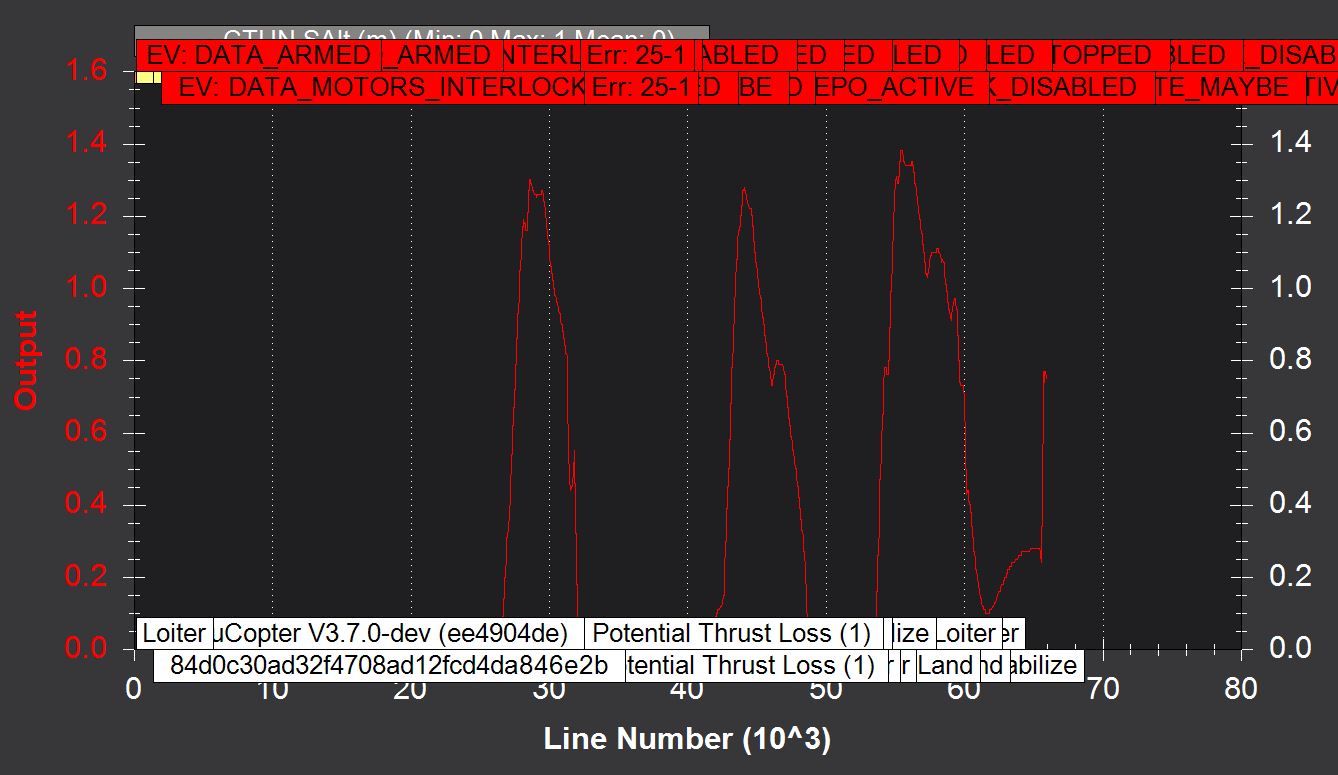
Best,
Thomas
I was trying to use ir-lock with the realsense t265 for indoor navigation purposes which is why I couldn’t test from higher altitudes. I ended up changing PLND_EST_TYPE to 1 and setting PLND_YAW_ALIGN to 18000 instead of 180 and it worked beautifully, perfect results almost every test. Thanks a lot for your time!
If you have a video, the indoor nav would be interesting to see. Which ArduCopter firmware version are you using?
@ThomasSFL
My precision landing IR lock is working fine when I trigger land mode below 15 meter of height, but it fails to do above 15 meter (even though land is triggered vertically top of the IR lock), It also works on RTL perfectly but again if we trigger RTL above 15 meter it fails. I need this to work for about 80 meters (i know the range of sensor is 15 meter only)
I want this to start searching for target don’t land until it acquires the target on switching land mode , is there any way to this??
In mission planner parameters PLND_ENABLED = (0,1,2) in which
1 Enabled Always (currently I am using)
2 Enabled strict (I want to know about this), do this something help in my case.
I tried using companion computer where I take the reading from pixy camera sensor(connected via usb with Raspberry pi) if it finds the target, mode changes to land but it starts behaving like the first video shown by @samucs
Is it possible to to achieve precision with pixy camera connected with raspberry pi (landing_target_encode python APIs) what prams should I prefer
or is there any way can get the data of TAcq on raspberry pi so that i can switch the drone to land using raspberry pi
Thanks and regards
Akash Kumar
Good Day @Akash_Kumar,
The standard operating range of the IR-LOCK Sensor system is 15 meters. We make customized systems for some project, but that typically is not necessary.
What version of ArduCopter are you using? I believe the latest version only has two enable options (0,1).
I don’t recommend connecting via RPi. This probably affects the controls timing, which is very important. The IR-LOCK Sensor acquires targets very quickly (less than 1/50 sec), which helps the controls alot. You need to make sure that your aren’t slowing this down with the RPi.
Best,
Thomas
Thanks @ThomasSFL
But I need a solution that It should have some strict landing like it should not land until the target is acquired. Is there any way to this with or without companion computer. Is there any way to know that the target is acquired ??
@rmackay9, please look into this if you have any other alternative solution to this.
Thanks and Regards
Akash Kumar