For those others still struggling with this issue, I think we’ve found the solution to our version of the problem.
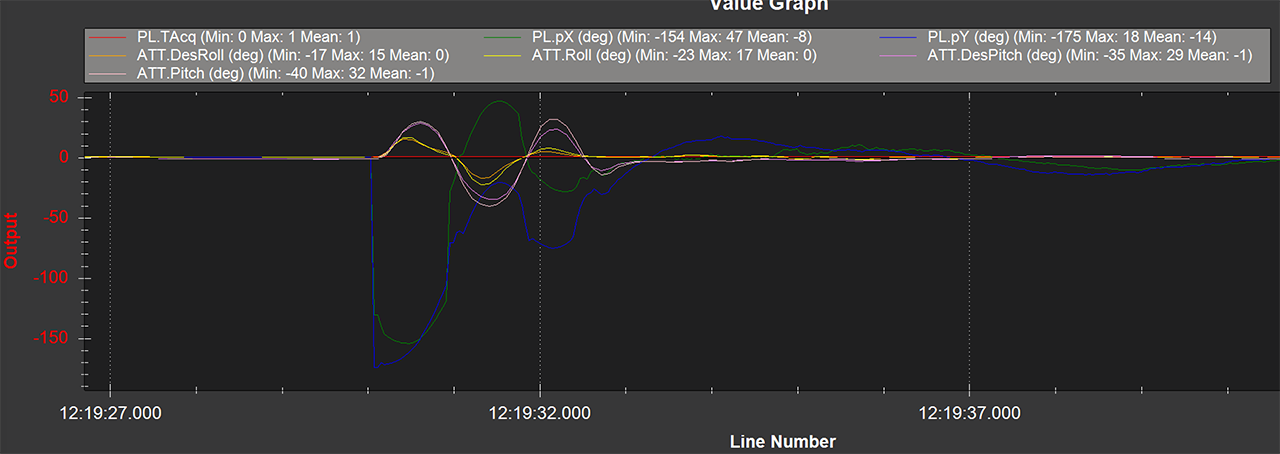
Like other people in this thread, we were seeing very violent motions from our drone when initiating the precision landing, enough to make us worried the drone was going to crash itself.
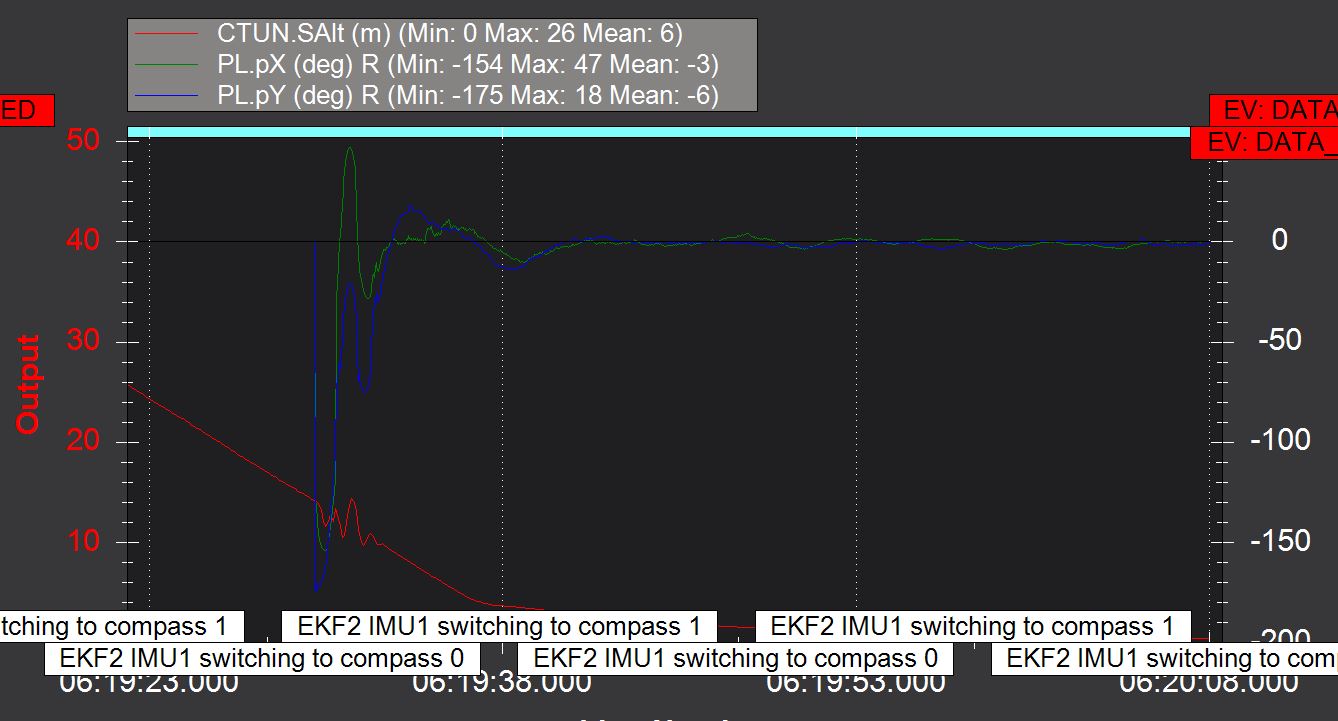
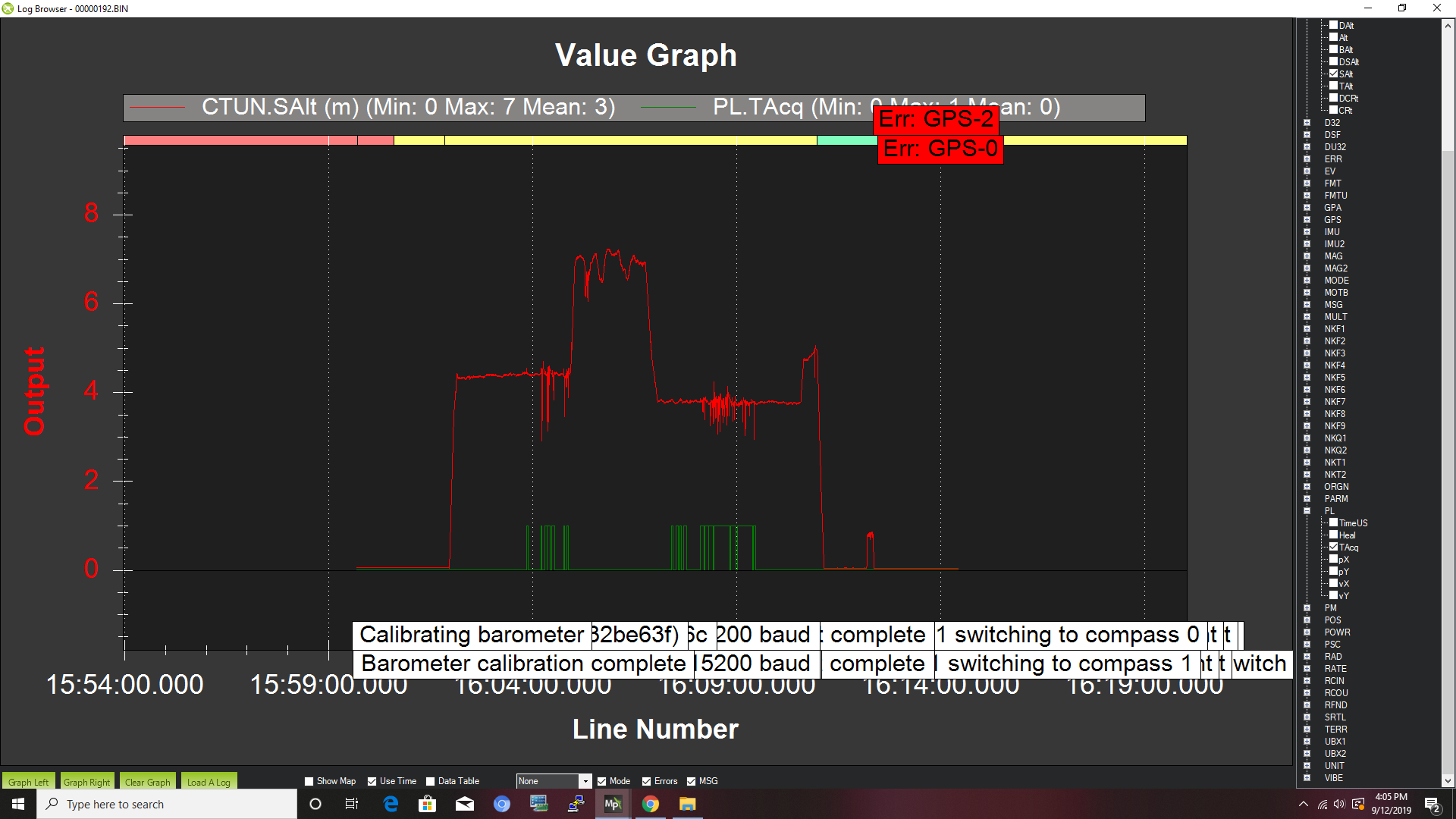
When analysing our .bin files, we saw that the TAcq (Target Acquired) Boolean was always 1. Upon thinking about it, this didn’t make sense, as there were times in our flight that the drone was landed away from the MarkOne beacon. It turns out, that in the outdoors, the Pixy was detecting targets everywhere! We’d done the calibration indoors so that the MarkOne beacon appeared slightly blurred at a distance, but our exposure setting on the Pixy was set to 13 (we’d never changed it), and this meant that when we went outdoors with more light, the Pixy was always detecting targets in the surroundings.
We’ve just set the exposure to 1, and recalibrated the Pixy with the MarkOne outdoors, and now, quite reliably, the only target being detected is the MarkOne. We did this in bright sunlight in a car park, and the Pixy was still detecting some targets in the form of the bright spots of light reflecting off of cars, and we couldn’t get rid of this, but everything else was fine, and I reckon the precision landing will work as expected now (though we haven’t been able to test fly since the change).
If this really is the cause of other people’s issues too, then it would beg the question of, why are people only starting to see this issue now? Was the default exposure setting in the Pixy firmware lower in previous versions?
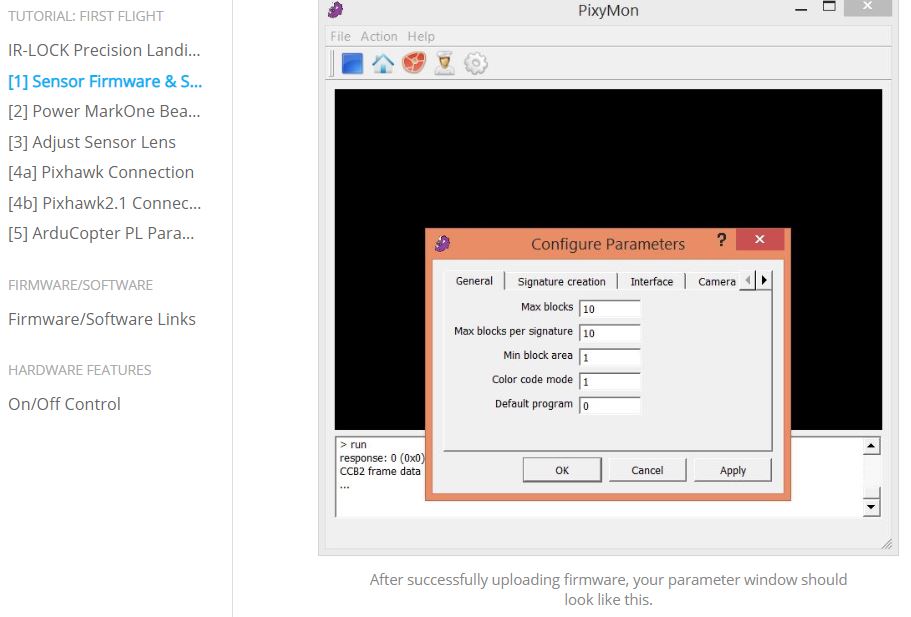
Anyway, if anyone else wants to try and see if this fixes their problem, you want to open up Pixymon with the Pixy plugged in, and find the “Exposure” setting. See what it is and maybe try reducing to the minimum you need. We found 1 was fine.
Hope this helps,
Tom