You have to enable the battery monitor and reboot, and then I believe the other options will be available.
2 Likes
Thanks @wicked1, that was it! Is that a new behavior?
My battery monitor seems to get disabled a lot during upgrades.
I had no trouble with the battery monitor. Upgraded Cube from 3.6.5 to 3.6.6 and all the parameters were there, upto the last decimal. I’m using Mauch sensors and I compared the parameters against the calibration sheet.
@rmackay9 - is there a SITL method to see the EKF compass switch in action before/after the bug fix?
@hdtechk, thanks for the report. There are two other reports of the Matek F405 freezing so I’ll try and bump up the priority on getting to the bottom of it. If that users could report here in the forums instead of facebook that would be great… but…
@havi0019, It can be reproduced in SITL now because we added a 3rd compass to SITL (after finding this bug) but I’m afraid I don’t know the exact steps to do that. You’d have to try and get @tridge to get the steps perhaps by asking him on the developer gitter chat. Sorry, I’ve already got 3 items on my please-help-me-tridge list so I can’t add any more :-).
We download firmware on official github ardupilot.
There are all commited firmware. After you Can use mission planner tout install with local file.
1 Like
Finally some good weather! 3.6.6 is flying great for me, probably mainly due to the mechanical changes I have made. I still have two issues. The first is RTL not landing - I have seen this a lot with the 3.6.x series - the copter RTL’s, reaches the home location, but then never descends. Here’s an example:
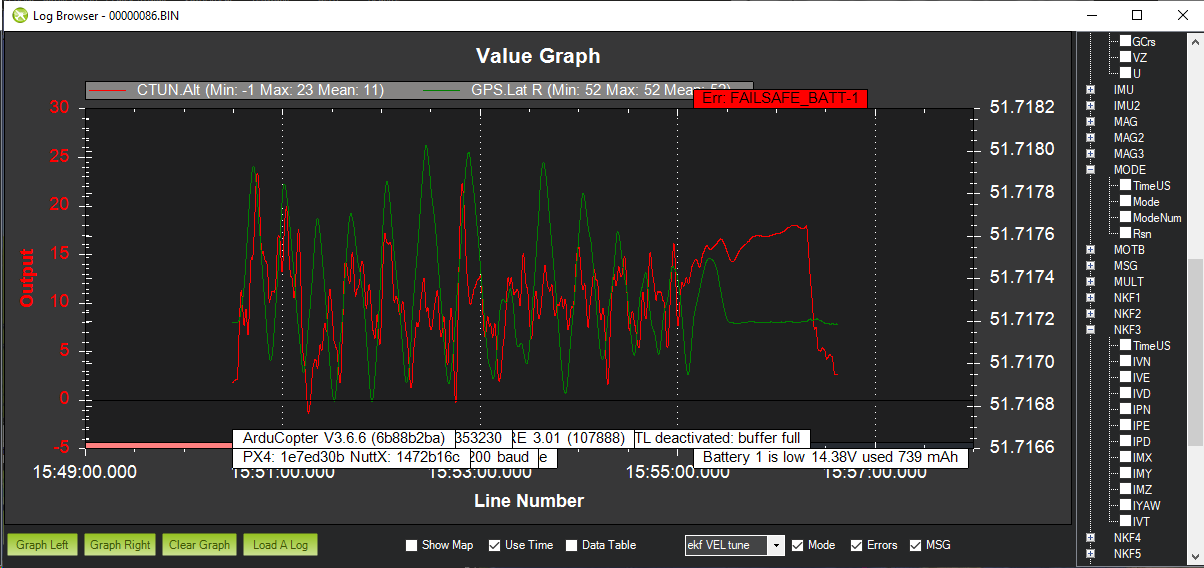
You can see after the failsafe the copter moving to the launch position, but having reached there it just sits. In the end I give up, change mode and land. I’m guessing this is something to do with the EKF not being confident in its position (it usually happens after blasting around a while), but the counter argument is that the copter is in a stable hover for a long time - so things can’t be that bad. Full log is here https://www.dropbox.com/s/cdph125xf72ak90/00000086.BIN?dl=0
The second issue is RTL simply landing. I only had this once (I used to get it a lot) and it only occurred once I tried going back to 2 EKF instances, so I wonder if it is related. You can see that the EKF primary changed, but that the GPS glitch had cleared. All of my other flights were GPS error free, so I’m wondering whether that also is related to running two EKF instances. (This was a manual RTL test initiated by me):
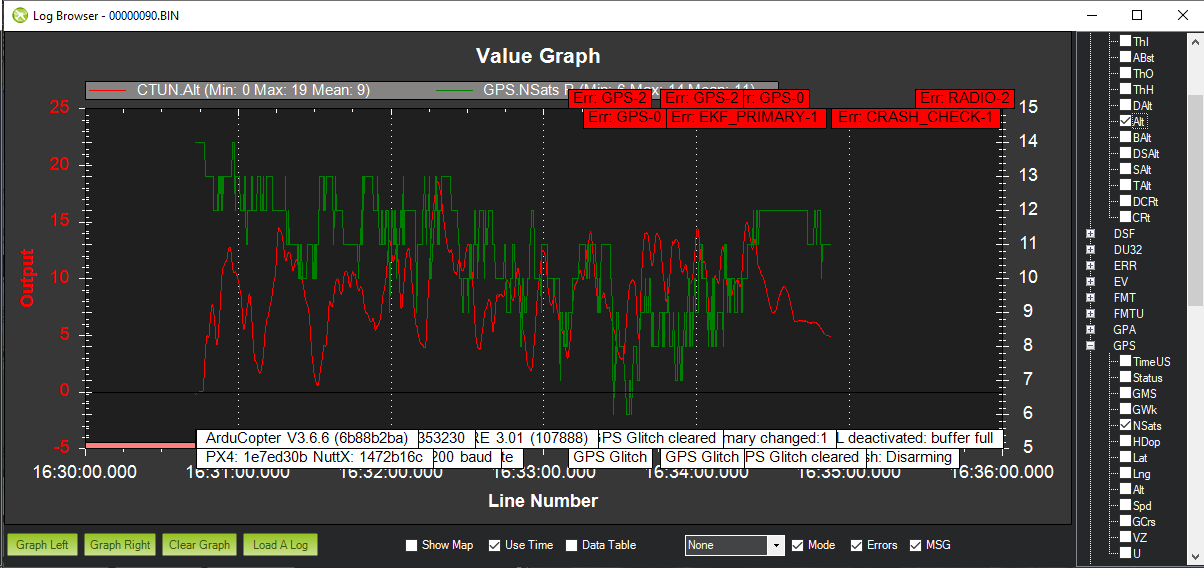
Log is here: https://www.dropbox.com/s/5o2j0kupnj4rogc/00000090.BIN?dl=0
The great news is that prior to this flight the copter felt stable enough to fly acro, so I had quite a lot of fun with that.
I don’t see anything wrong in your parameters. Check for compass problems. I know that the copter will refuse to descend if unable to face the same direction it took off.
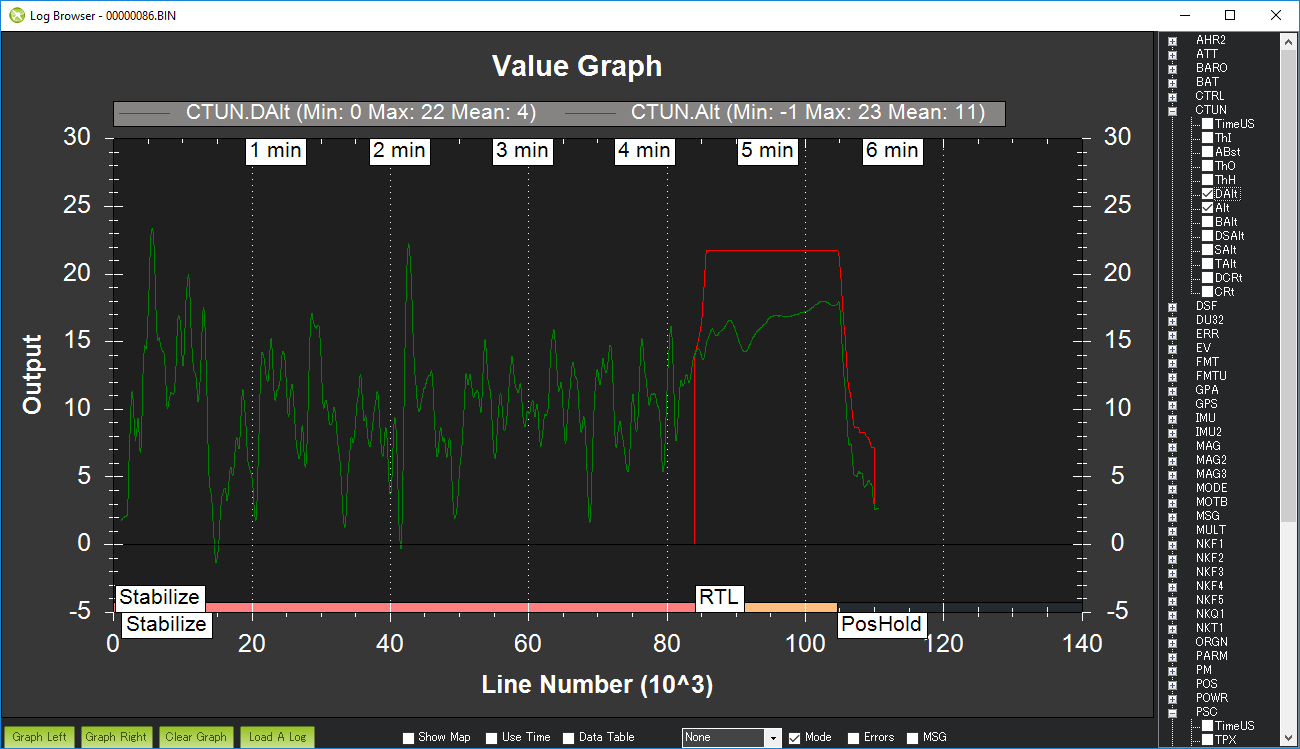
Re RTL not descending, it appears to be the altitude that is the problem. It is taking a long time to climb to the desired altitude. It may be that it is because the PSC_POSZ_P has been reduced to 0.3? Perhaps try restoring this to the default which I think is “1”. PSC_VELZ_P is also low at “3” when I think the default is “5” although I think this is less of a problem because it does seem to be achieving it’s desired climb rate. I think it’s also possible that the EKF’s altitudes estimate is a bit off so it may be taking some time to recover.
I think he copied those psc_posz and velz settings from me… We’re playing w/ small over powered copters, and I had oscillations before I reduced those. But a lot has changed w/ our tunes since then, and I have been meaning to eventually revisit those parameters. I definitely don’t want to discourage Andy from trying higher values… I just wanted to mention why they’re low. I have had successful RTL’s w/ those values… But again… Things have changed, and his copter is not mine, etc…
I don’t think this is the problem. Under normal circumstances the copter ascends to RTL height just fine. I think I had to reduce those settings to get stable AltHold performance (the copter is very powerful). Also the copter is at the RTL location - why would it wait to climb (and it wasn’t obviously climbing - I would say it was just hovering)? I thought the algorithm left the height alone if it’s at the home location?
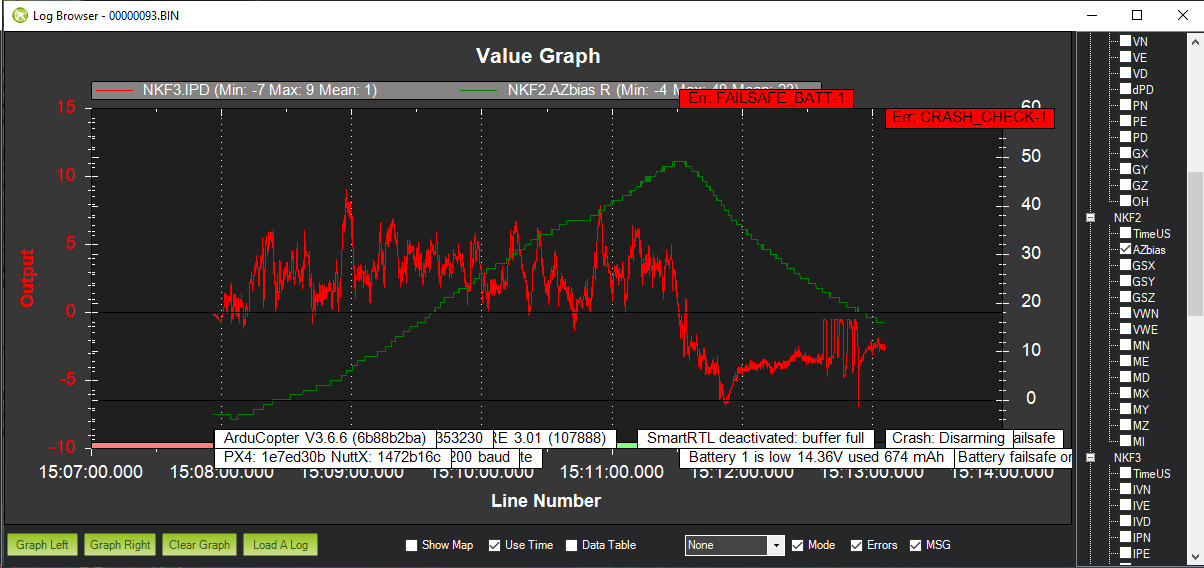
What I have noticed is that the ABIAS get’s really high (like 50) up to the point the RTL kicks in and then starts going down. It makes the EKF position innovations go negative when RTL occurs - I’m wondering whether this is part of the problem.
And yes I know that vibes are the problem, but I am really at the limit of what I can do for this frame/build  Essentially I think the mass/inertia of the copter is too small for the power of the propellers. At some point I will try some tri-blade, but the copter is flying pretty well at the moment.
Essentially I think the mass/inertia of the copter is too small for the power of the propellers. At some point I will try some tri-blade, but the copter is flying pretty well at the moment.
Sir… please guide me for a stable & safe arducopter fw version.
I’ve Hexacopter,using FC pixhawk 2.4.8.
Ublox m8n GPS module.
How to downgrade firmware? please help.
You can find previous firmware here: http://firmware.ardupilot.org/Copter/
(This link can be found through: http://ardupilot.org/copter/docs/common-downloads_firmware.html)
Thanks a lot sir…But if you guide me how to upload this firmware.
In Mission Planner, from the top menu bar, choose “Initial Setup”, and on the left bar that appears choose the first item “Install Firmware”.
Next, on the bottom right you can choose “Load custom firmware” and then refer to the firmware you have downloaded from the link I previously pointed you to. This allows you to downgrade.
Even more direct is to choose “Pick previous firmware” - you will then be presented with a “live” list of available builds.
To move forward in the installation, you need to first be connected to the hardware you are using.
Hope this helps!
1 Like
always been grateful for yoy reply…Thanks a lot.
@rmackay9 I changed EK2_ABIAS_P_NSE to 0.0005, i.e. a 1/10th of the default and things were much better - copter flew home and always landed. I also ended up with zero EKF errors and much better BAlt/Alt alignment.
AZBias only ever got to 3, rather than the 50 or so you can see in the graph above. So perhaps one to add to your list of settings to review with @priseborough for small copters.
This parameter seemed to fix my copter going out of level issue, too… Where the more throttle I gave it, the more it tilted to the left.
I understand the logic behind that…
What’s strange is that also made my copter slightly less efficient… Somehow it made my hover throttle change from .17 to .2, and my flight time decreased by about 30 seconds. I went back and forth between my old config and the new one and the results are consistent. Only changes being the ek2_abias_p_nse parameter, and the copters trim. (Trim changes because when the copter was leaning to the left with throttle, I had it trimmed right to keep it level at just above hover power, to compensate for the lean issue I was having)