I suggest you investigate your problem using a GPS dedicated utility , like Ublox U-center, this way you can make sure your problem is not ardupilot related, otherwise it is just adding “noise” to the thread.
I posted in this threat because I really thought it was related to the 3.6.6 firmware, but it seems obvious that it is not because I use a fairly usual equipment and it does not make sense to be the only one with this problem. I will continue investigating.
Sorry if I bothered
“GPS” (serial3) no longer recognises ublox GPS that I plug in. I have two GPS modules set up for blending.
GPS1 works when I plug it into serial2
GPS2 works when I plug it into serial2
Neither GPS1 nor GPS2 are recognised/seen when plugged into “GPS” (serial3) port.
Compass is seen.
Hi, not sure if my issue is related to vmajor’s, but I’m also having a problem with hex gps after upgrading from 3.5.6 to 3.6.6 (and 3.6.5). Bootup is hanging somewhere around gps initialization. If I flash the 3.6.6 firmware and don’t remove power, I can connect and edit params to match the param file i used for 3.5.6. If I don’t edit the params before powering off (leaving the cube with 100% default values), the cube refuses to boot (hangs before lights flash on hex gps.) The specific params in dispute are either gps- or serial-related, can’t tell you which ones exactly. Don’t have the time to test unfortunately. I don’t think i’m changing any other params dealing with hardware so that’s why I’m fairly confident it’s gps.
Update: I reverted to APM 3.5.7 and GPS port was still dead. I then reflashed 3.6.6 and the GPS port came to life again.
I am confused and concerned as during preflight setup last night I had no GPS problems. When I powered on the drone this morning and attempted a test flight I could no longer arm it due to “GPS1 failure”. The rest is in my original post.
I hope there are no more issues.
Maiden flight today on Cube + Here (v1). Had to disable Compass 3 to get rid of compass variance errors on the ground.
Two short 2 minute hovers to learn mid-throttle, then a 13-minute auto-tune session went smooth flight-wise. But - I’m using FrSky passthrough telemetry to a Horus X10 - the autotune was extremely verbose about what it was doing with the added effect of my HUD being partially frozen. The V/A/mAh numsats, etc all froze during the autotune and came back to life right after the “Autotune completed succesfully” message.
I confess, it’s a friend’s copter and radio, and my last autotune was on 3.6.2 or .3, on my Taranis with the same passthrough, so it came as a complete surprise.
1 Like
Thought someone should bring this up here. Matek f405 std freazing.
1 Like
Hello everybody.
I tested New version today. The 3.6.6.
After some flight with mission, out last mission have Big issue. The drone flip to 180degree and speed up to the ground. A Big crash !! We used a cube 2.1 with hex here1.1…
No particular error in log…
We made drone since 3 years and i never see that
I downgrad to 3.6.3.
Thanks
A problem I have had is on Smart RTL it performs excellent but on Normal RTL it just wants to keep overshoting onl since lates 3.6.6 update
only
Hi helper_Drone,
Where did you find 3.6.3? I only found 3.5.7
thanks
Did most of the BATT_ configuration parameters get removed in this release? I’m only seeing
BATT_MONITOR and BATT2_MONITOR.
I don’t see:
BATT_AMP_OFFSET,0
BATT_AMP_PERVLT,18.0018
BATT_CAPACITY,5100
BATT_CRT_MAH,0
BATT_CRT_VOLT,0
BATT_CURR_PIN,3
BATT_FS_CRT_ACT,0
BATT_FS_LOW_ACT,0
BATT_FS_VOLTSRC,0
BATT_LOW_MAH,0
BATT_LOW_TIMER,1
BATT_LOW_VOLT,0
BATT_SERIAL_NUM,-1
BATT_VOLT_MULT,12.25
BATT_VOLT_PIN,2
You have to enable the battery monitor and reboot, and then I believe the other options will be available.
2 Likes
Thanks @wicked1, that was it! Is that a new behavior?
My battery monitor seems to get disabled a lot during upgrades.
I had no trouble with the battery monitor. Upgraded Cube from 3.6.5 to 3.6.6 and all the parameters were there, upto the last decimal. I’m using Mauch sensors and I compared the parameters against the calibration sheet.
@rmackay9 - is there a SITL method to see the EKF compass switch in action before/after the bug fix?
@hdtechk, thanks for the report. There are two other reports of the Matek F405 freezing so I’ll try and bump up the priority on getting to the bottom of it. If that users could report here in the forums instead of facebook that would be great… but…
@havi0019, It can be reproduced in SITL now because we added a 3rd compass to SITL (after finding this bug) but I’m afraid I don’t know the exact steps to do that. You’d have to try and get @tridge to get the steps perhaps by asking him on the developer gitter chat. Sorry, I’ve already got 3 items on my please-help-me-tridge list so I can’t add any more :-).
We download firmware on official github ardupilot.
There are all commited firmware. After you Can use mission planner tout install with local file.
1 Like
Finally some good weather! 3.6.6 is flying great for me, probably mainly due to the mechanical changes I have made. I still have two issues. The first is RTL not landing - I have seen this a lot with the 3.6.x series - the copter RTL’s, reaches the home location, but then never descends. Here’s an example:
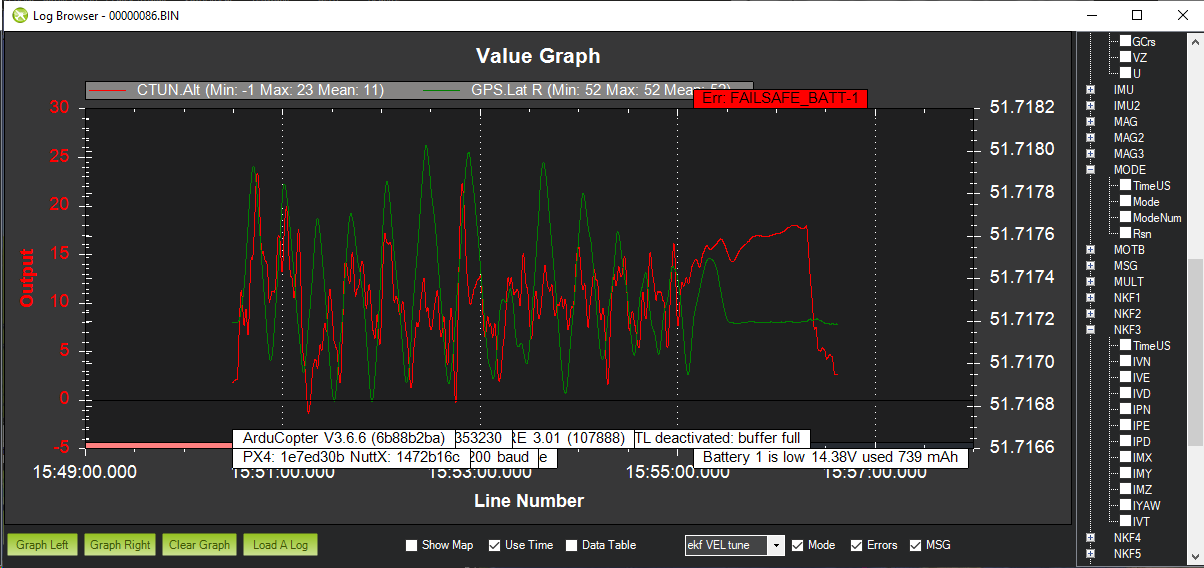
You can see after the failsafe the copter moving to the launch position, but having reached there it just sits. In the end I give up, change mode and land. I’m guessing this is something to do with the EKF not being confident in its position (it usually happens after blasting around a while), but the counter argument is that the copter is in a stable hover for a long time - so things can’t be that bad. Full log is here https://www.dropbox.com/s/cdph125xf72ak90/00000086.BIN?dl=0
The second issue is RTL simply landing. I only had this once (I used to get it a lot) and it only occurred once I tried going back to 2 EKF instances, so I wonder if it is related. You can see that the EKF primary changed, but that the GPS glitch had cleared. All of my other flights were GPS error free, so I’m wondering whether that also is related to running two EKF instances. (This was a manual RTL test initiated by me):
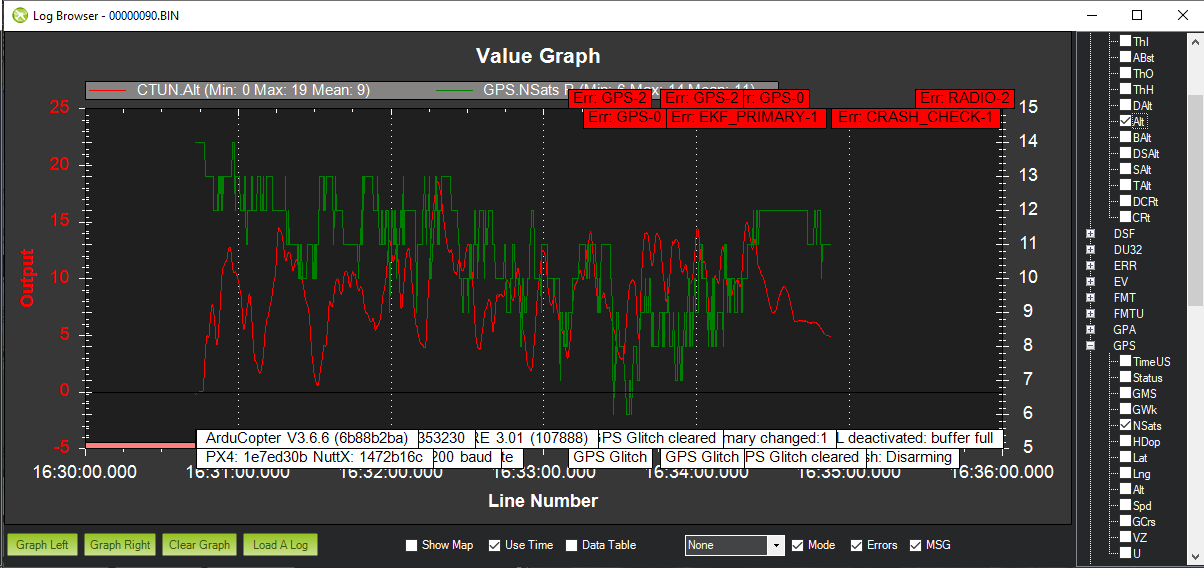
Log is here: https://www.dropbox.com/s/5o2j0kupnj4rogc/00000090.BIN?dl=0
The great news is that prior to this flight the copter felt stable enough to fly acro, so I had quite a lot of fun with that.