Copter-3.6.2 has been released as the default stable build and should appear in the ground stations within the next hour or two. Changes compared with 3.6.1 are the Release Notes and also copied below:
Bug fixes:
a) Benewake TFmini and TF02 driver reliability fix
b) Range finders report healthy to GCS when out-of-range
c) Spektrum RC parsing fix when more than 7 channels
d) Fix alt drop after quick switch from RTL to Stabilize and back to RTL
e) RPM sensor reliability fix by initialising analog input pin
f) Winch removed from build by default
Remove bootloader from px4-v2 builds (reduces firmware size)
Thanks to our beta testers who helped identify and re-test the issues once fixed!
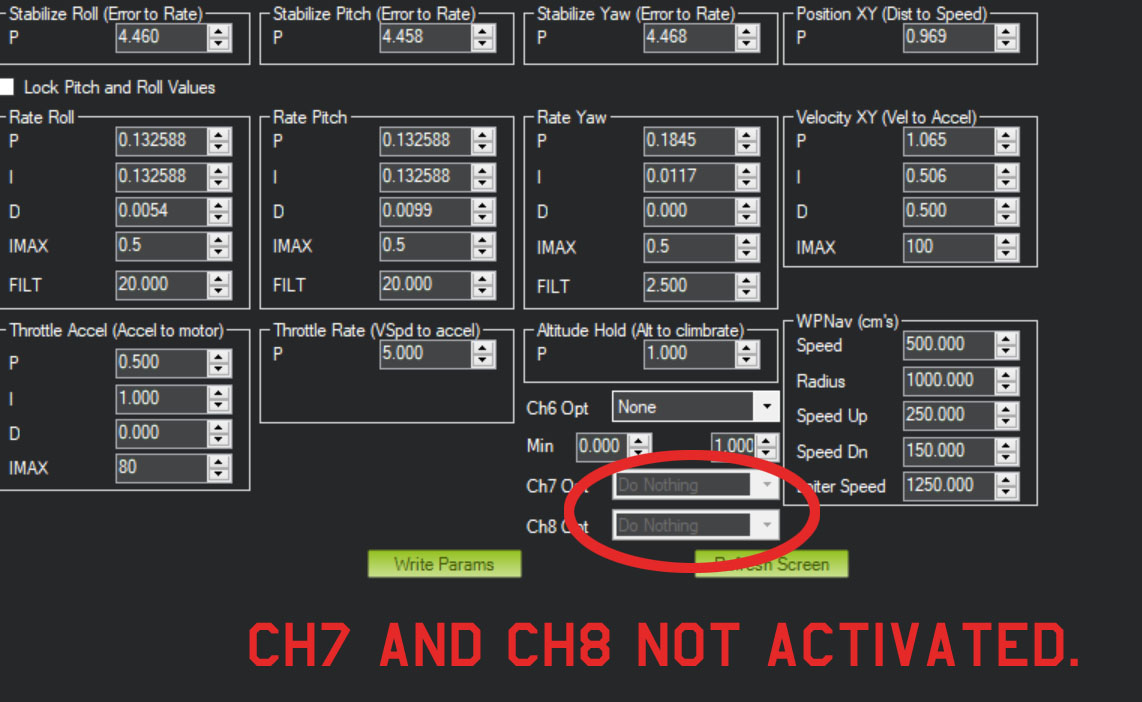
Doing a build and noticed missing ch7 and ch8 in mission planner I am using spectrum. I never seen this before.
radio config shows channels are there and ative. I setting up retract landing gear and gimbal. how do i fix this and is it a firmware issue?
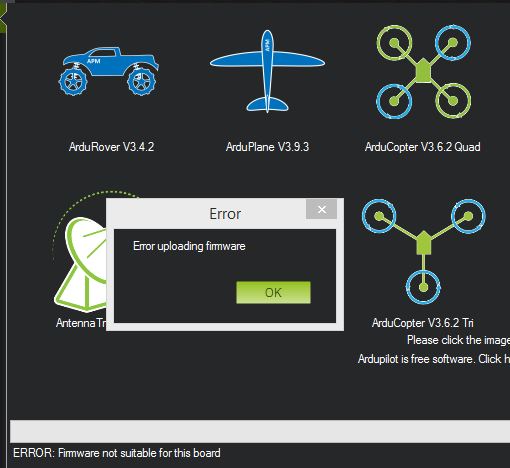
Yes I using spectrum radio dx8. BTW something is off I just loaded ChibiOS: ff603d11
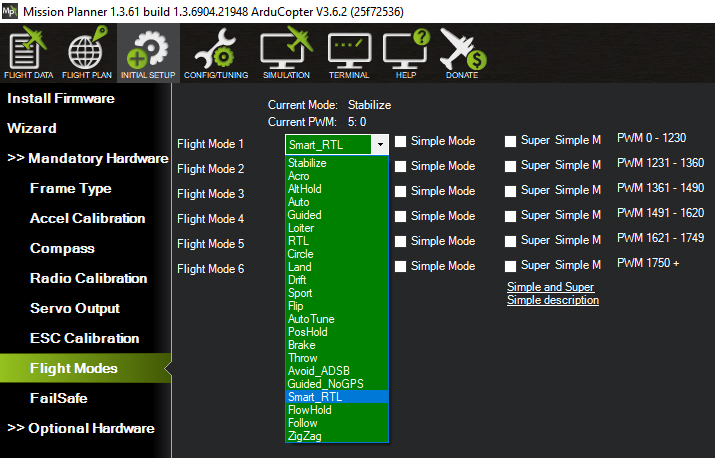
ArduCopter V3.6.2 (25f72536) and now it works using the non beta MP software firmware menu. Could be I loaded the developer FW by mistake.
I suspect this is a mission planner issue so could you try reporting this in the mission planner issues list? Worst case you can download the firmware directly from the firmware.ardupilot.org site and then use the “Load custom firmware” link.
I wanted to thank all the Ardupilot developers and the most visible face of this project rmackay9
Today I have flown the arducoper version 3.6.2,the new Loiter mode is wonderful, it runs more and is more agile,and what to say the smartRTL is very good
In what if you have to keep improving is the TF-mini Lidar, in flights in exterior happening the 6 meters of height, the precision fails
Thank you for making me laugh and hallucinate like a child.