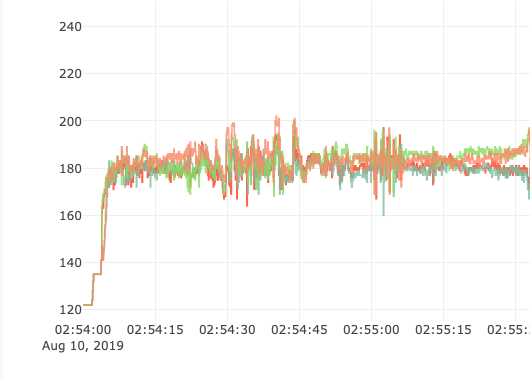
@lautaro, from a quick look at the logs it looks like a motor/esc failure on motor 1. It shows the classic evidence of this which is namely that motor 1’s output goes high, the opposite motor (motor2) goes low, the vehicle leans towards the failed motor (i.e. leans forward, right).
I also see the RC3_MIN is quite low at 982. This should be fine in general unless the ESCs haven’t been calibrated. Did you remember to calibrate the ESCs? I would also check the motors using MP’s motor test screen.
Hi thanks for the quick reply, yep ran the ESC calibration,and the 982 is the min of the RC3 , however whats weird is that the quad flew afterwards just fine in stab, althod,loiter and no esc/motor failure, (flew 10 min ) trying to replicate the twitch that the autotune does to see if the quad did the same and it did not . However when I enabled the autotune it crashed again. I’ll also test the esc in oneshot and normal mode. However this drone was flying 3.5.x ver for all 2018 with no issues doing autotune and mission mode so it was what you say reliable quad.
@lautaro, Not sure but it really looks like a motor/esc failure. AutoTune puts a lot more strain on the ESCs/motors than normal flying so it is more likely that issues will appear in AutoTune vs other modes.
I managed to load the Omnibus f4 pro v2 version of the arducopter 3.6.10 with_bl. It looks like everything works in contrast to the version without Bl. I will be testing in the coming days. Thanks for developing the firmware.
Hi so third time was no charm, , reflashed the esc’s 14.9 bheli , recal the esc via MP(successfully), flew with PID from last successful autotune (3.5.7) the quad flew just fine in all modes thou when I switch to auto tune and down it goes, seems related to esc only when in autotune, as RC1 max out ; however the quad in all other flight modes does not run into this issue even when I push the quad . So I will replace esc to something newer as the other quads I have don’t run into an issue with autotune.
9Hi
Anyone have problems with external compass calibration on CC3D Revo board?
I’ve tried everything and still cant get compass to work,i2c pins on revo board are pins 9 and 10 on flexiIO port?
It seems that Motor PWM calculation has been changed since 3.6.9. My ESC’s wont initialize unless I change MOT_PWM_MIN from 1000 to 900. Or run a new ESC Calibration which changes my ESC PWM min to 1050.
Just to confirm, I downgraded to 3.6.9 and 1000 works fine.
On 3.6.9: MOT_PWM_MIN: 1000 ESC CAL:1000
On 3.6.10: MOT_PWM_MIN: 1000 ESC CAL:1050
Hello. I use PX4 with sonar. After update to 3.6.10 not work sonar Maxbotix I2C MB 1242. Message Bad LiDAR Health. But when I returned to 3.6.1 all working super. Please HELP !!!
I am able to compile the 3.7 dev from master branch. How to compile the 3.6.10 branch, could you please tell me which brach I should select?.
I have tried by selecting from Tag List but no luck.
I’m flying cheap chinese M8N clone on a bird, and a repurposed Inspire GPS (genuine M8N with Tallysman dual-band antenna) on a 2nd, both on 2.6.10. Not a single GPS problem in 10+ flights.
It might be your particular unit.
@Haryono_Haryono, this is really a developer question so feel free to ping on the ArduPilot gitter channel. In any case, if using the command line type, “git checkout Copter-3.6” and then do a “git submodule update --recursive”.