HI, I had a new flight with a bit lower PIDs, and less oscillation. I have a pixracer.
In altitude hold, was not holding altitude well.
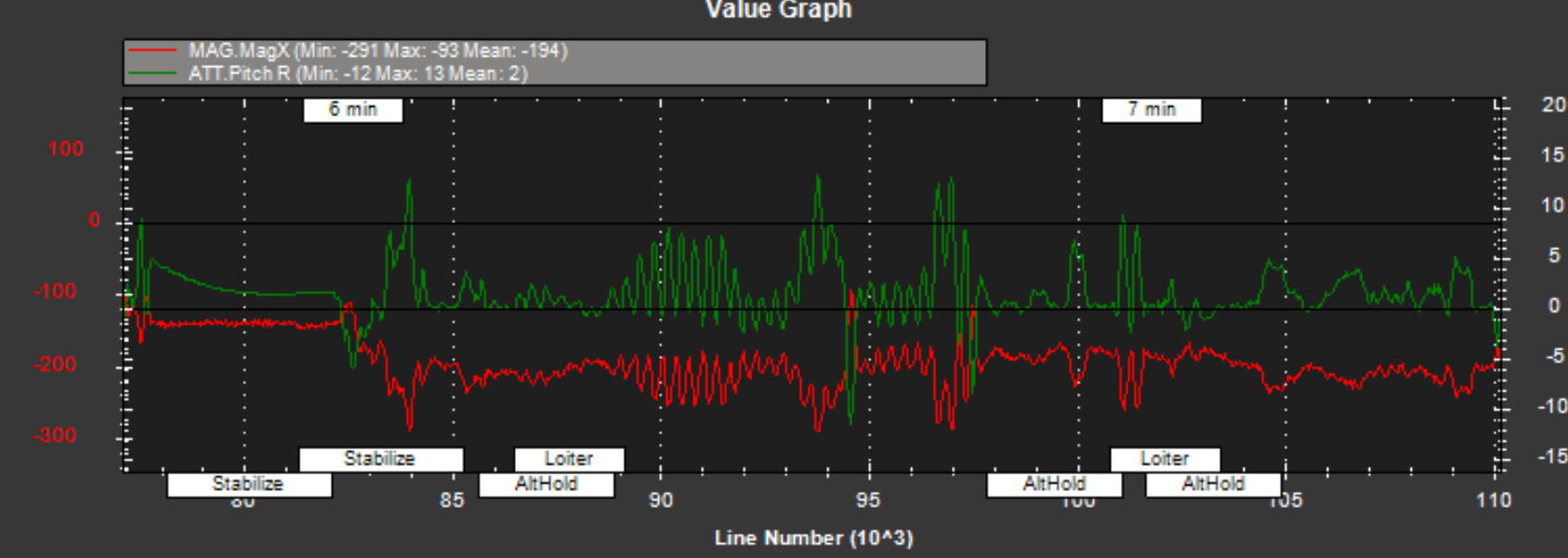
In loiter, the copter produced a periodic roll or pitch in a direction. I’ve never seen this before.
Do you have any advice? Attached my logs.
@rmackay9 Thanks for advice. this time the copter wasnt moving after powerup, for sure.
the first Loiter part looks really interesting… Since there is a similar behavior in ATT as well as the MAG I am wondering if you performed a CompassMot?
Hi, I just finished a small testing with 3.4.-rc5. (take off in stab, switch althold, try stay at one place, land)
I had a bit of a problem with altitude hold, the copter was drifting up and down about ±1 meter, with small jumps.
I had a bit of fast vibrations, mostly with full batteries. Accidentally messed up my PIDs with MP PID-sliders and overwritten good-old config file a few days ago. So this may be caused by the oscillation, i dont know.
At least it was not skyrocketing and had no issues with the compass/ekf/ahrs.
Please note my hover throttle is set to the minimum 0.25, but its should be 0.2. 2016-09-15 18-49-52.zip (2.7 MB)
Hi, arrived from the todays test.
I cleared compassmot parameters, recalibrated accel and compasses.
MP failed to calibrate my compasses. somehow resulted in a 0 error for all the values, multiple times. After the next reboot i got compass not calibrated.
with onboard compass calib, it went fine.
flight:
this time althold and loiter behaved somewhat better than yesterday. Although saw some messages about switching compasses and ekf. Altitude hold still was not stable, drifted up/down.
At the 2nd flight i crashed 2 props due to a failed maneuver.
Hi,
I have it inside an aluminium box, from a clone kit. But the board is from auav. It has a foam on the baro inside.
I had a stable altitude hold somewhere around rc2/rc3.
Br,
M.
I’m having similar issues with my 3.4RC5 Pixhawk. None of these issues were present in my previous version (3.4RC1)
Accel calibrations were re-made. After arming and taking off, it starts to roll mostly left, I land it and then the accelerometer (Attitude Indicator), is tilted with a 10~15° bank.
Then, I disarm, and it levels again. I take off, and it is still tilted.
 So this may be caused by the oscillation, i dont know.
So this may be caused by the oscillation, i dont know.