…After i did not fly for few months waiting for 3.4 month ago iwe finally update it…
As i remember i try it quickly and it was flyable…i also did small rebuild of everything on Y6,and possible other unnoticed issues…and then my next update was the one where was some PID translations…i can’t exactly remember what rc version of 3.4
And that is when problems started which i successfully overcome…
After that update i went to field and all hell break loose when i try to fly…with very small throttle copter become like crazy in all directions,luckily i manage to land it with only one leg slightly bent on T connection…
Before that flight iwe also updated BLHeli firmware to the latest 14.7 and maybe changed a few settings…at home everything seems fine…
When i almost crash my first association was something is wrong with ESC…and indeed it was bcs i enabled one shot in mission planner and didn’t know that calibration with that option does not work…strange when i was doing ESC calibration routine(as 100 times before) motor responded very vel and throttle followed stick commands…??
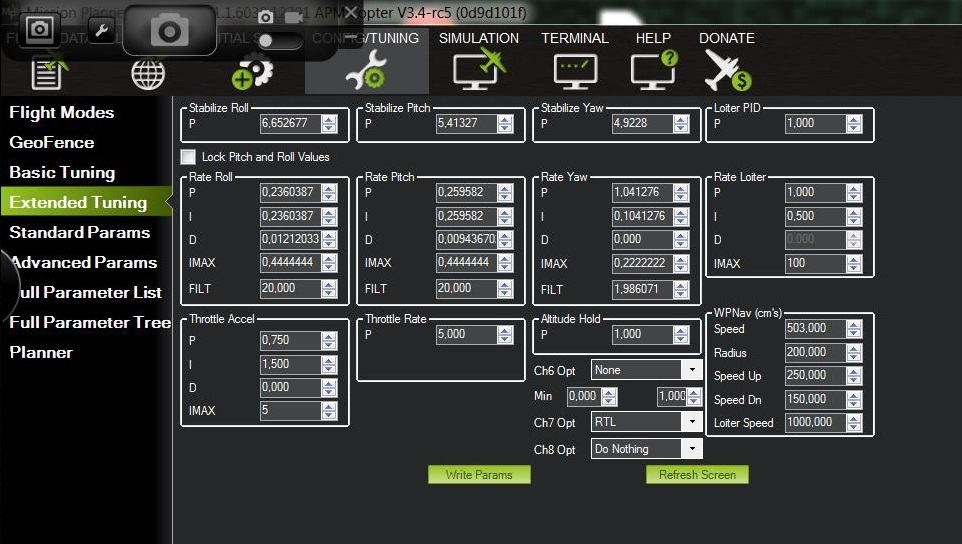
At the field disaster…ESC totally uncalibrated.after few more tries i went home and find out that somehow (probably in translations)my pitch PIDs went from 0.16 range to 1.16 range… that was this;
Few days later i went to field determined to do Autotune,with my ESC properly calibrated…my first try i made mistake and adjusted autotune on pitch and yaw,from lowest point and that flight almost cost me copter again bcs. everything was more than 20 min and when i was at the very end of both axle my lipo alarm went on…an i was pushing hoping to finish and have at least some numbers for next try…iw landed on 3.4 lipo cells or less on failsafe…ok…
Next day i was more prepared,but unfortunately this time i left new option of learning Throttle mid on day before,and something was wrong with that so when i first try alt hold my copter start to fly uncommanded up…i knew it th.mid is wrong…it was around 0.65 and real value from logs is 0.41…that day i was to nervous to tune more…
04.09.16
Next day is here…nice and calm…Pitch autotune was long but successful…separate tuning of course…yaw autotune also longer than i expected (but much less than pitch) succesfull…iwe emptied my LiPos for that day with that 40Ah
09.09.16
Next day it seems it was again day for weird things…my roll tune wasn’t nice even autotuned before…so i started again.This time even with decent alt hold and not to much wind,copter drift very very slow,autotune don’t want to start?!when i took a better look and move stick 1 step started and than stop…i went thru all autotune like that;stick move -step of autotune… and manage to finished it and results was not bad at all(that was when Randy sad somewhere that Leonard changed something to be easy for large copters)
In another rc4 thread Randy answer this
“Emin, that sounds like the stick are not fully centered so during autotune it thinks that the pilot wants to control the vehicle.” but i do not understand bcs.my sticks look centered
12.09.16
Next day i was hoping to fly…even call friend to make small video…everything was ok BUT when i switched to loiter copter start drifting and act strange,stupid me i even try few times…something must be wrong with GPS, landed and
noticed that very,very small piece of my GPS ceramic antenna is broken,at bottom hardly visible…i went…
short video from that day;
16.09.16
Since i have even bigger X8 with Pixhawk,same setup i replaced y6 cheap 30$ GPS with CSG shop 80$
with external magnetometer ,advanced one with HMC5983,temperature resistant…Today i went for flight…and didn’t noticed my tablet was on standbay all night with battery drained,so final log is short,i don’t like to fly blind…i tested alt hold and it is very good,even in fast forward flight…Loiter is perfect,but after i reviewed logs i noticed only 4 GPS satellites??? How is that possible with Hdop around 0.65 all the time?


17.09.16
my Y6 final pids all axes tuned…
I will try to upload correct logs but please don’t blame me if i mess with timeline bcs i have other timelines in my everyday life…last 3 days was on 3.4 rc4 for others i am not sure…will upload rc5 today