Firmware - ArduCopter-4.0.4
Hardware - Omnibusf4pro
GPS - Here+ RTK (but flying in 3D fix without RTK setup)
Build - 5" props quadcopter
Issue:
Really could had been a disaster day, was lucky to retrieved the quadcopter. Given command to takeoff to 4 meters in guided mode, and then it started takeoff and keep climbing straight upwards, even given land command multiple times from RC6, even tried switching to stabilize mode from RC5 still quadcopter didn’t seem to respond to any of those commands. And within a minute after takeoff, quadcopter went out of sight straight upwards in the sky.
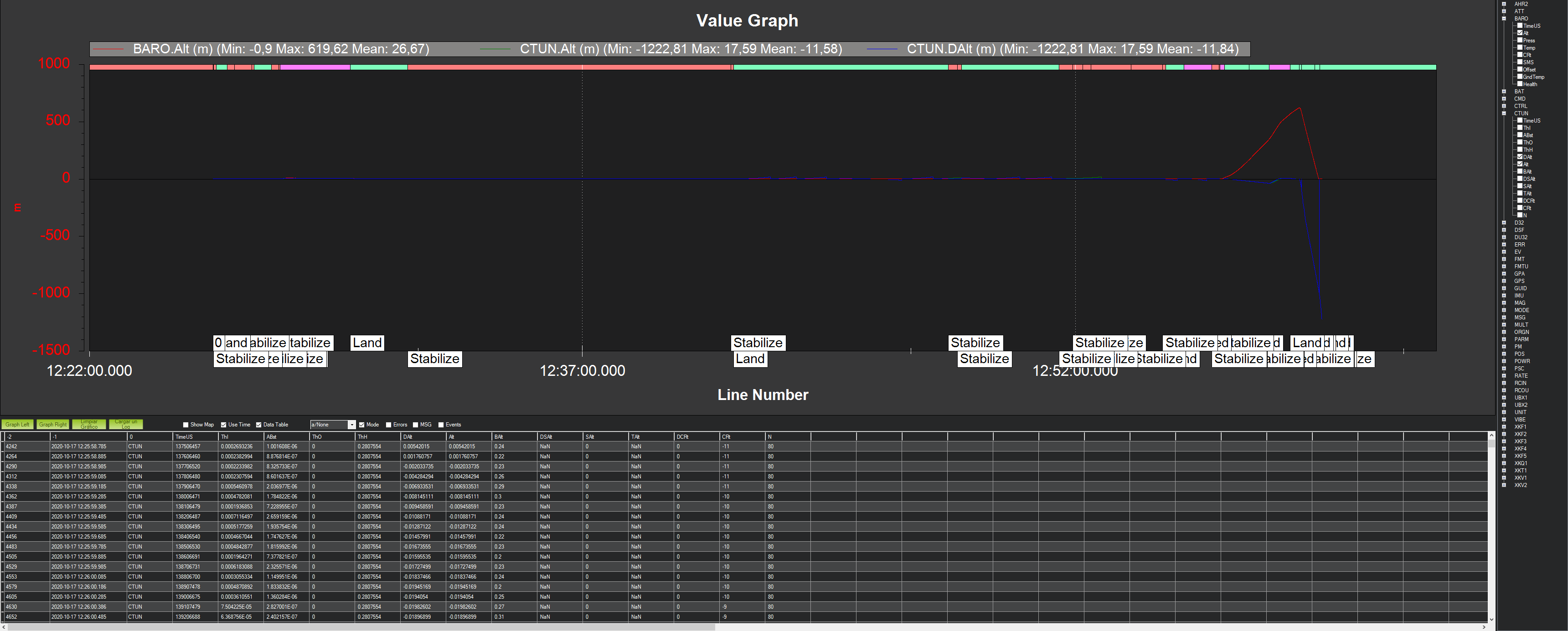
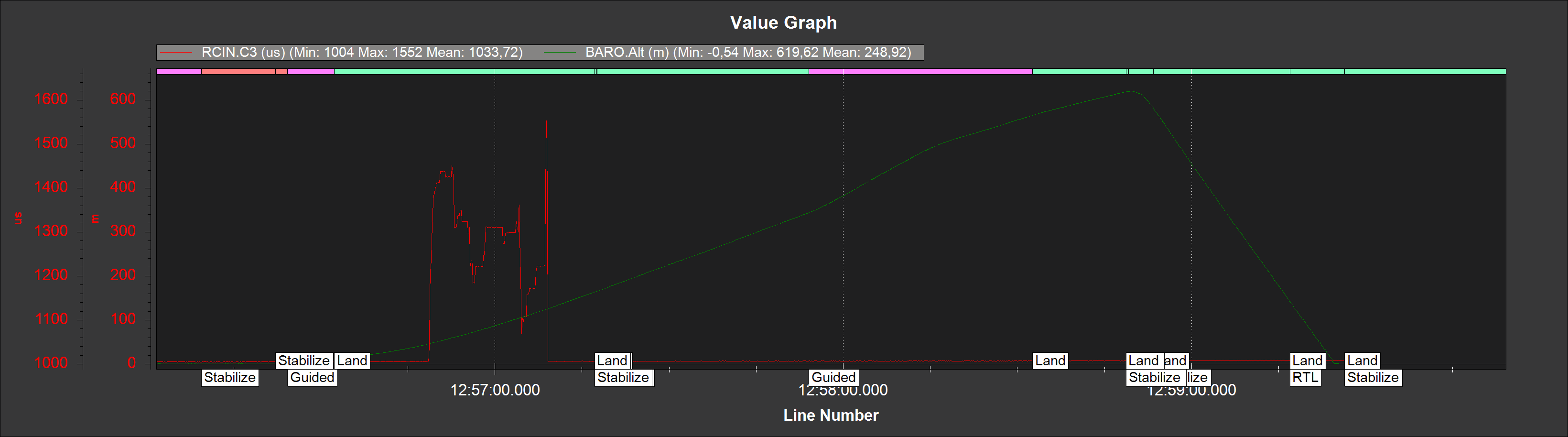
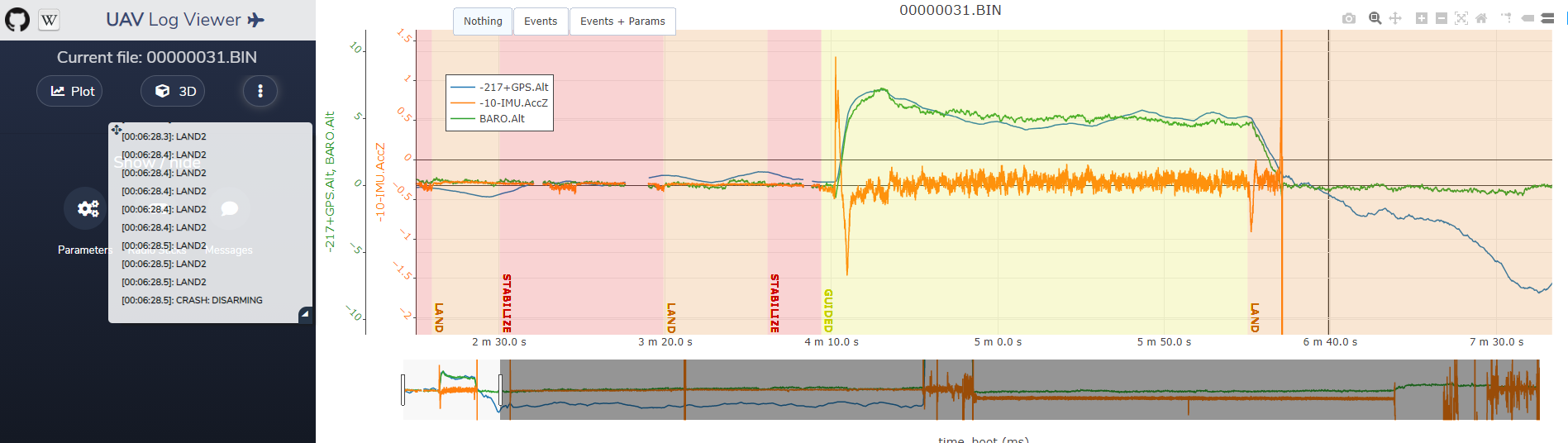
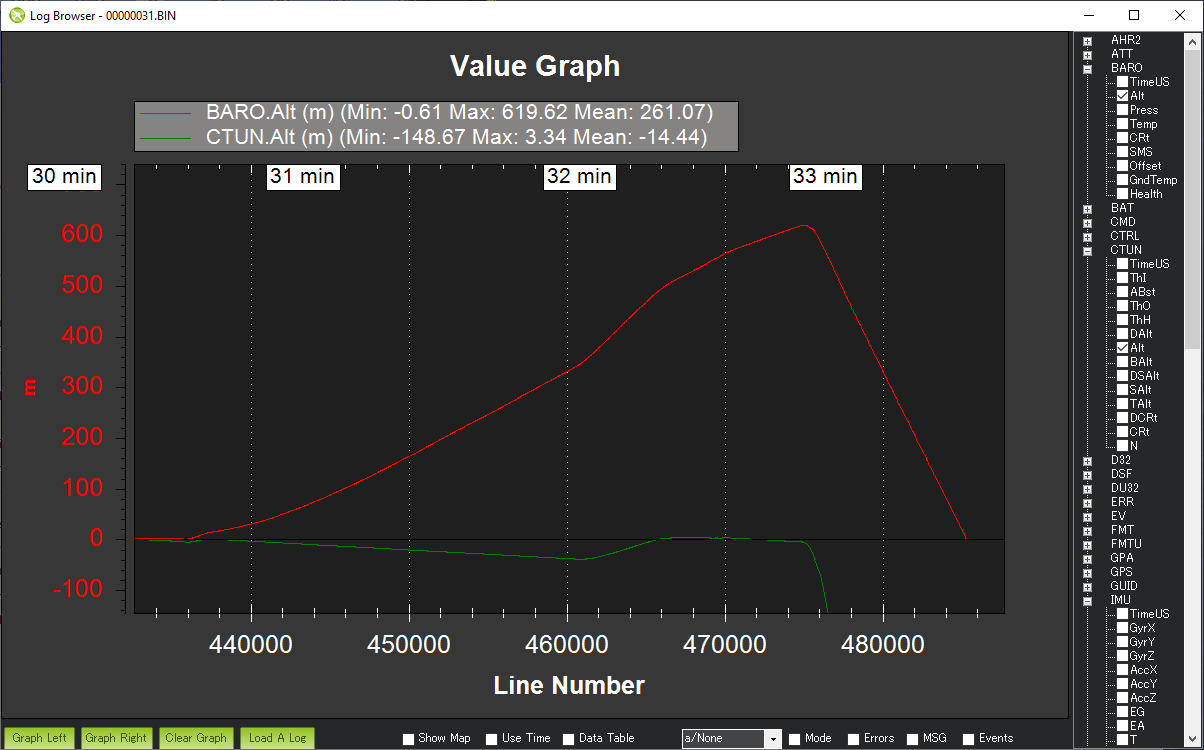
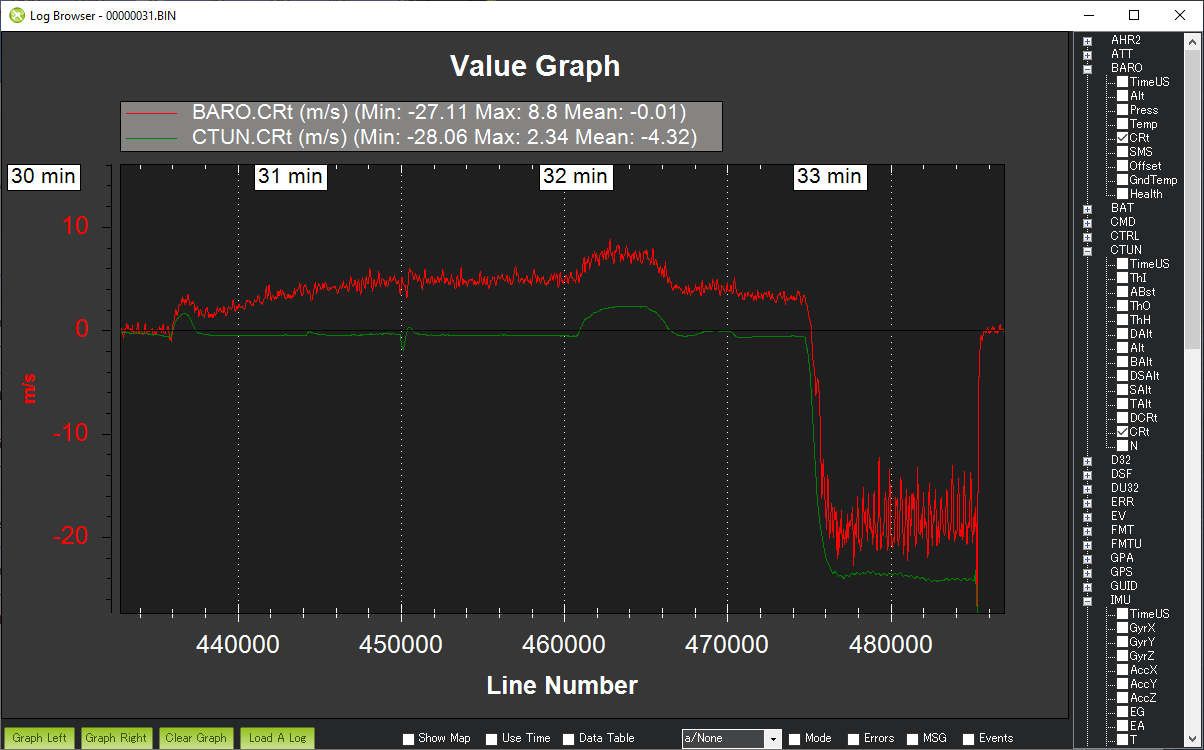
After few minutes, we found it crashed nearby on the ground, with gps mount broken apart from the quad, but we really didn’t saw quadcopter coming down, we found it about 100 meters away after some minutes, when we retrieved the quadcopter, 3 of the 4 motors was still armed, and after picking the quad and tilting it in all angles it was not disarming. After retrieving the log, only thing which i found was not normal was EKF altitude estimation throughout the flight, baro was showing right readings, and EKF was using baro as altitude source, i am not able to figure out any other significant causes of this whole disaster flight. From the logs, it seems like quadcopter didn’t actually come crashing to the ground, it seems to land but we not able to see that, overall just gps mount got damaged and rest of the parts are completely intact and in working state, no props got damanged as well. In the air, quadcopter even traced some waypoints in guide mode which it was supposed to trace at 5 meters relative altitude.
From the logs, i found it took flight controller quite a while to trigger any kind of failsafes, RTL command triggered too late, and i am not even sure what was actually happening just before quadcopter started to come down, please help in finding out what actually went wrong to avoid this catastrophic situation.
Log:
https://drive.google.com/file/d/1MprOn5FzknTWj9DZGGoyJrPcvWfG7wT9/view?usp=sharing