Firmware Version - ArduCopter 4.0.4
This is something which also happened on one of my 5 inch quadcopter in the past which is briefly described already in this post Continuous uncommanded climb, suspecting EKF issues
Now, this issue comes back to haunt again on multiple 5 inch quadcopters build, basically i am using 2 different FC boards which running on our small quadcopters, one is omnibusf4pro FC and other one is a similar clone with same F405 MCU, ICM20602 IMU and MS5611 baro, i have 2 separate logs of these 2 boards on which this issue arrived again.
Omnibusf4pro FC log:
https://drive.google.com/file/d/1vjC42XMtkGEvfU9Muk0Vm7qSzbnDDoea/view?usp=sharing
F405 custom board log:
https://drive.google.com/file/d/1w1O204_ZDLP-E3ggt3R4TFQnkl-CSILv/view?usp=sharing
Unlike last time, i have most of the arming checks enabled in both of these logs, vibrations seems to be good from the logs, but i have not tuned both of these quadcopters that well at this moment, but both quadcopters flying well and quite stably, i don’t think tuning playing a part in causing this issue.
EK3_alt_source is different on both, f405 custom board using baro and omnibusf4pro using M8P RTK GPS with RTCM corrections. From logs, i cannot see any issues related to baro and gps altitudes.
Issues:
From logs, you can observe, in all the logs, even in this post Continuous uncommanded climb, suspecting EKF issues, previous flights went well without issues, but checkout just the last flights in all logs, you can see a common pattern-
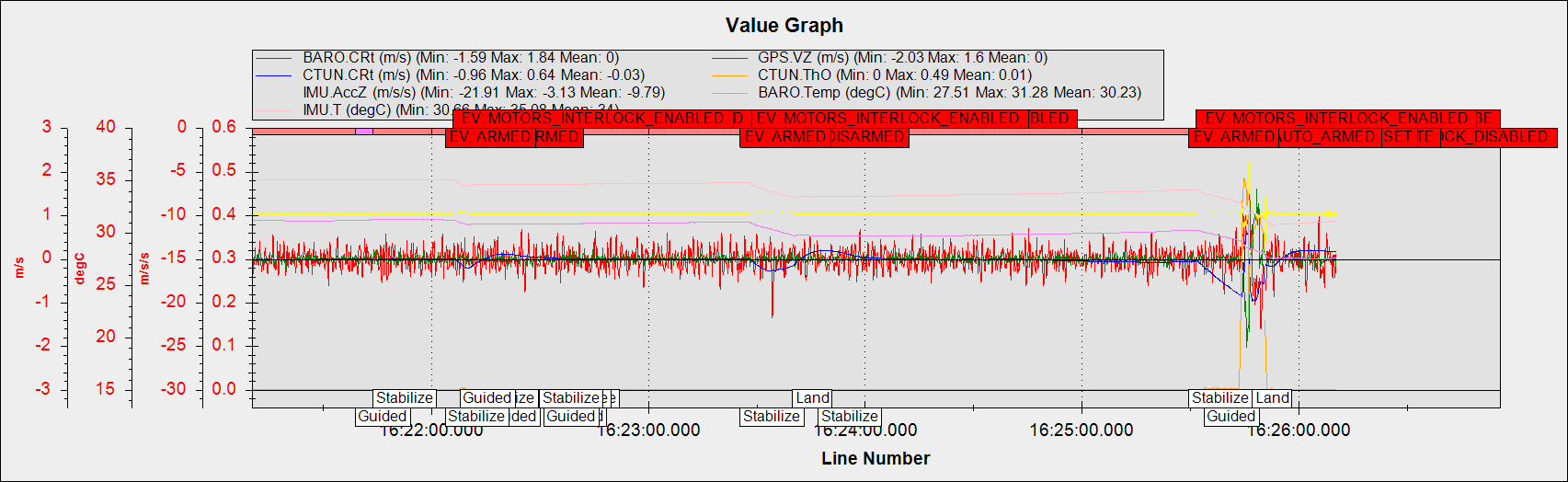
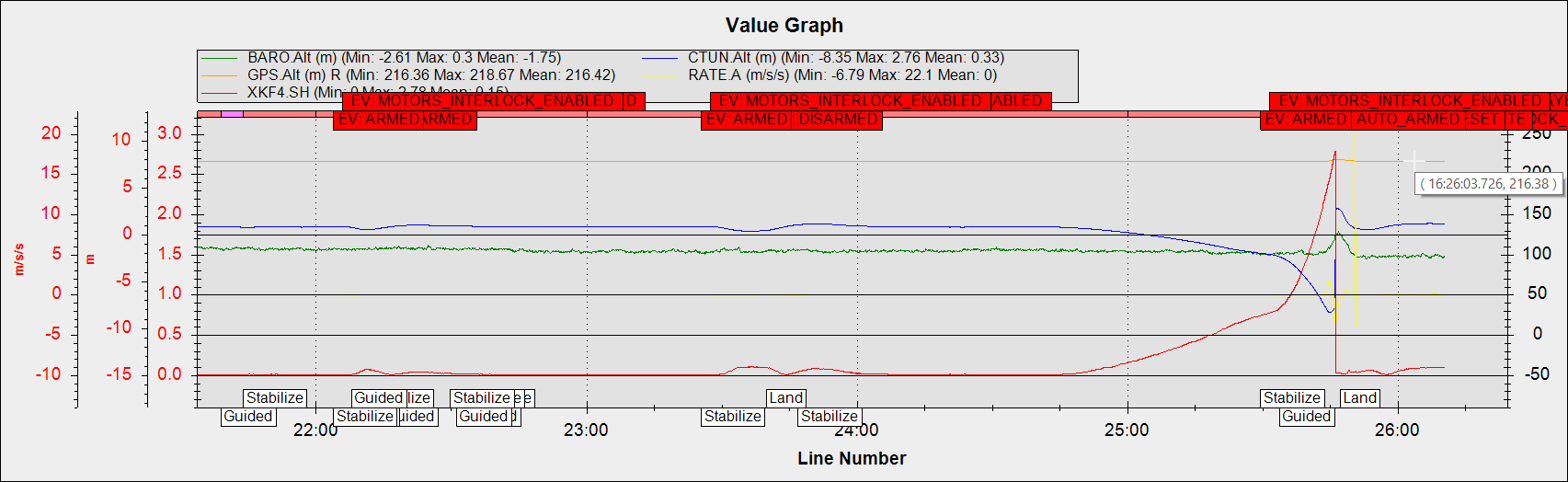
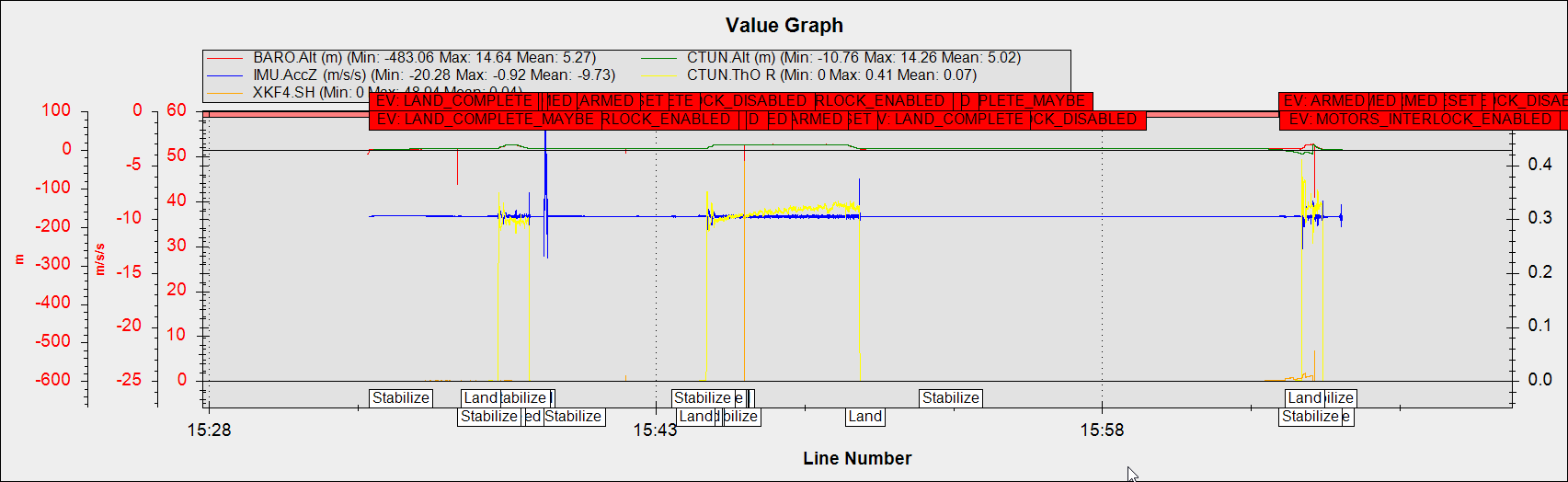
- sudden noises in IMU data
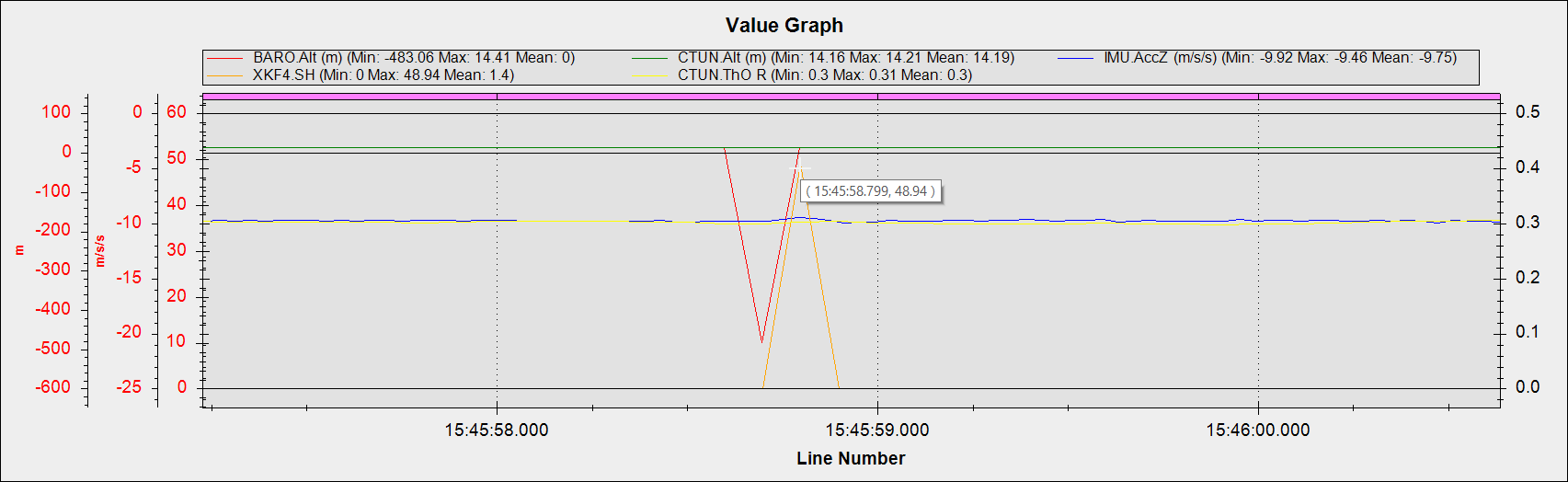
- high XKF4.SH innovation variations
- looks like having some relation with keeping the quadcopters on for long time
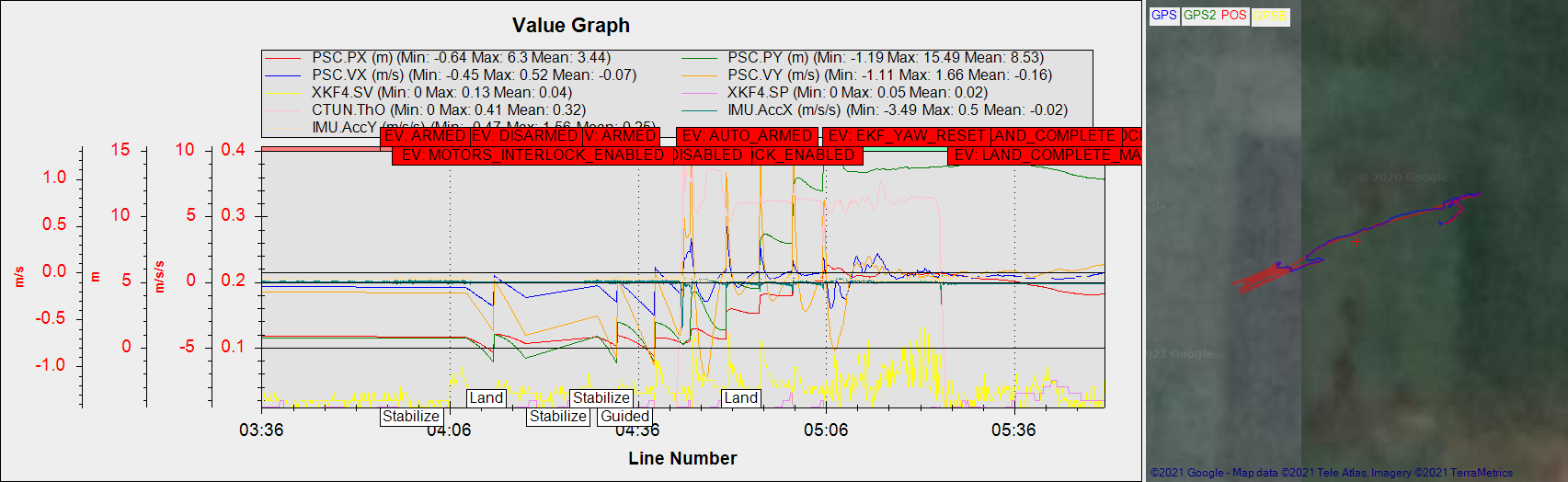
During the last flights, all quadcopters behaved in similar manner too, very sudden increase in altitude with large extent, and tendency to drift sideways while taking off, as can be seen, on the current logs, last flights are too short cause it looked really unsafe in real time.
Some observations:
Continuous uncommanded climb, suspecting EKF issues with that issue XKF4.SH is not even close to be normal, so i can understand some issues related to some IMU sensor fault, but in above 2 logs, i don’t think too much is going wrong, and on same quadcopters build, i also took more flights after this issue, everything went alright, this issue occur rarely and mostly when quadcopters left on for long time.
I understand that there still might be issues with my current IMU sensors, but then firmware not able to handle this issue well at this moment, and i also can see why, in above 2 logs, while taking off, XKF4.SH was close and under 1, so probably passed all arming checks, but at runtime there is no option either for me and for the firmware to deal with this issue. Probably some failsafe might have triggered if i would have kept them flying when they were misbehaving but they really looked unsafe.