Hi guys,
Recently also got a TBS full size TX and a Diversity Nano RX.
TX is set to dynamic power sitting on my desk, stock antenna’s, currently on 10mW TX power.
I’ve got the matek F765 board, and am also having issues connecting to Mission planner.
Setup is as follows:
Mission planner on PC -> UDP connection -> phone wifi hotspot -> XF Wifi (on the TX) -> nano RX -> Mavlink2 -> Flight controller (set to mavlink2 on telem1 to suit this configuration)
I’m using firmware 4.10 on the full size TX. The release notes state: (among other things, just listing relevant points here)
- improved: MAVLink message routing
- fixed: turn on WiFI after re-enabling the RF
- fixed: MAVLink bluetooth disconnection issue
- fixed: CRSF telemetry to WiFi module
- improved: MAVLink library updated
- improved: internal code restructuring
So it looks like some important bugs were fixed thankfully.
However, when connecting to Mission planner (version 1.3.74) and connecting takes a very long time. Usually around 8 minutes. There are a lot of “already got param” messages.
The link quality also looks like its trash:
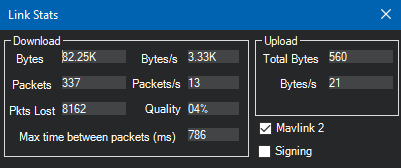
However, this may be reporting incorrectly, I’m not sure yet, see this comment here for more details, basically, Mission planner thinks there’s a buttload of dropped packets if one of them were to arrive out of order: https://github.com/ArduPilot/ardupilot/issues/9752#issuecomment-437703166
I’ve just updated the full size TBS TX to the beta firmware v4.11
Release says only one thing:
- improved: MAVLink stability
Testing the connection with mission planner, I’m now getting 14-36% link quality, and a connection time of 1 minute, 2 seconds + however long it took me to unlock my phone and start the stopwatch (~20s). A marked improvement!!
I still need to switch mavlink to ON in the XF Wifi menu on the TBS TX every time, but it auto connects to my mobile hotspot as soon as it appears and the rest just seems to work. Still somewhat dissapointed in what I thought would have been a great “it just works” out of the box experience. The connection to Mission planner just dropped while typing up this forum post. Now wondering if I should have just got a dragon link instead (probably should have!!).
I’m spending a ton of time basically beta testing a feature which is a core part of the product! Ridiculous. True connectivity they say… I’m not seeing it here. How long has this module been for sale?
They also don’t have their own forum - just a facebook group. Posts are quickly drowned out in the noise as there is no categorization of topics. Not impressed.
Anyway enough moaning from me. Hopefully another update or two and this will work strongly.
Todo: Explore using the crossfire radios as a serial bridge, and use the Serial RTS pin on the FC to improve performance. Looks like this is only possible over the bluetooth module. Btw windows does not play very nice with bluetooth COM ports, just something to keep in mind, isn’t always TBS’s fault if BT doesn’t want to connect - works great with android, and should work well with linux systems.
