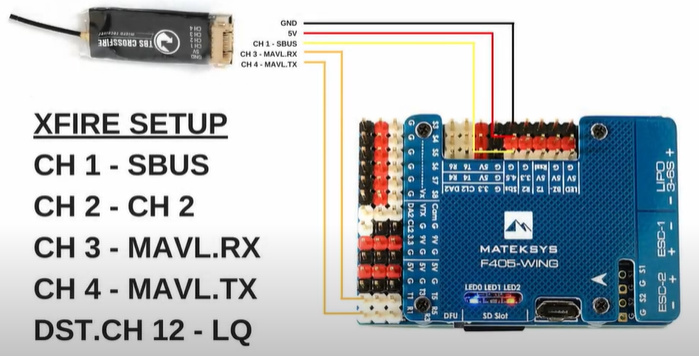
I can set the RX up for SBUS, wire it to ‘sbs’ pin on FC and all 12 channels work, good so far.
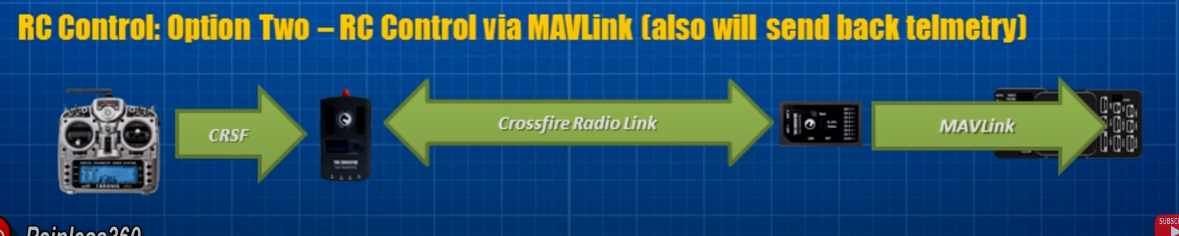
However if I set RX to use 'RC by MAVLINK, and the outputs CH1 and CH2 pins to MavlinkTX and MavlinkRX, and then connect to RX2 and TX2 on the FC, the radio controls are not ‘seen’
Various forums/youtube say the FC should pick it up automatically and AP documention indicates Serial port 2 is the one to use.
I’ve tried connecting TX-TX, RX-RX and also on serial 6, still no joy
Can anybody shed any light on the problem please?
One last thing, when I do get it working, is it correct that RC by Mavlink only supports 8 channels?
I’m going to put a request into Lee (painless360) for assistance, I’m a patreon,
I’m also wondering if this is not possible on ChiBios driven boards, such as the Matek 405 his article was using a Pixhawk.
HI, I got an answer from Lee yesterday, unfortunately not much help
Hey Stephen.
I got your email. I’m not sure it works like the way you’re trying to make it operate.
See my Crossfire swirsa and specifically the one on Pixhawk and Crossfire. That’s all I figured out with the help of the guys at TBS.
I’ve talked to TBS in the past about MAVLINK capability but they don’t use it in anger themselves…
Lee
I’ve asked him if he has the details from when he made the video, will let you know what he says
No me, I’m against crossfire it is not a telemetry radio, but an RC controller with some rudimentary telemetry capability. Radio power is asymmetrical, and the SX127x chips that it use, simply does not have the capabilities for real telemetry (it is slow).
I use crossfire. Connect tx-rx rx-tx I don’t connect the sbus as 8 channels is fine for my planes, quads etc. It looks like your connecting tx-tx rx-rx this won’t work. I get telem back and on the full size unit and send Bluetooth back to GCS/MP. Are you using Taranis + module?
@ukmook
Hi,
Thanks for your reply
I did have TX-RX, RX-TX correct (been doing this many times over the years) I just also tried TX-TX, RX-RX in case of any marking errors.
I was using UART2 on the F405 without any joy, but have since got telemetry via 433MHz SR radio from UART1, so I need to try CSFR again on UART1.
It may turn out to me being a mumpty and not checking all the available UARTS
Cheers
Steve
No worries Steve from your post I thought that it might be an easy fix. Also crsf is not implemented, but I’m guessing you have used the Taranis Lua script to output mav tx and rx.
In case you’re still fighting with the problem - have you tried setting the serial port to 23 (RCin) instead of 1 (Mavlink)? Because this just seems to have solved a similar problem to me on Kakute F7 AIO 1.5 (pending further testing). I now seem to have both RC and telemetry via the Crossfire channels set to Mavlink TX and RX.
EDIT: Actually it’s best to set the Crossfire pins to CRSF TX/RX as some sensors are missing when using Mavlink.
Note: It might also be necessary to make the “SR” parameter settings given on page 38 of the Crossfire manual. They’re meant for Mavlink but I left them even after switching to CRSF, and I won’t touch anything now that it finally seems to work.
On a side note, because that was the next thing that cost me hours: If you ever get the idea to control a VTX directly from Crossfire via a channel set to SmartAudio (which is very handy because AP doesn’t support SA), better get a real TBS VTX. I tried with a 3rd party one that was supposed to have SA, but it only works (reliably) from an FC (with BF, INAV), not directly connected to a Crossfire RX.
Hi I just tried today to set up ardupilot on a Matek-405 Ctr board.
I connected port 1 and 2 of the crsf Nano to Uart2 and defined the ports 1&2 on the crsf nano as mavlink and rx. the udp port on the wifi module was set to 8877 and I can connect the mission control to the flight controller over wifi. I am using a micro tx v2 on a jumper t18 radio.
i also tried with qgroundcontrol but did not manage to get tjhis working




 his article was using a Pixhawk.
his article was using a Pixhawk. it is not a telemetry radio, but an RC controller with some rudimentary telemetry capability. Radio power is asymmetrical, and the SX127x chips that it use, simply does not have the capabilities for real telemetry (it is slow).
it is not a telemetry radio, but an RC controller with some rudimentary telemetry capability. Radio power is asymmetrical, and the SX127x chips that it use, simply does not have the capabilities for real telemetry (it is slow).



 over wifi. I am using a micro tx v2 on a jumper t18 radio.
over wifi. I am using a micro tx v2 on a jumper t18 radio.