I will, what’s the difference between your binary and this one? https://firmware.ardupilot.org/AP_Periph/stable/f303-M10070/
the binary I’ve attached is more recent with few improvements…
1 Like
@Dave84 Your bin file seems to work in both cases, wanted to verify that the versions are right:
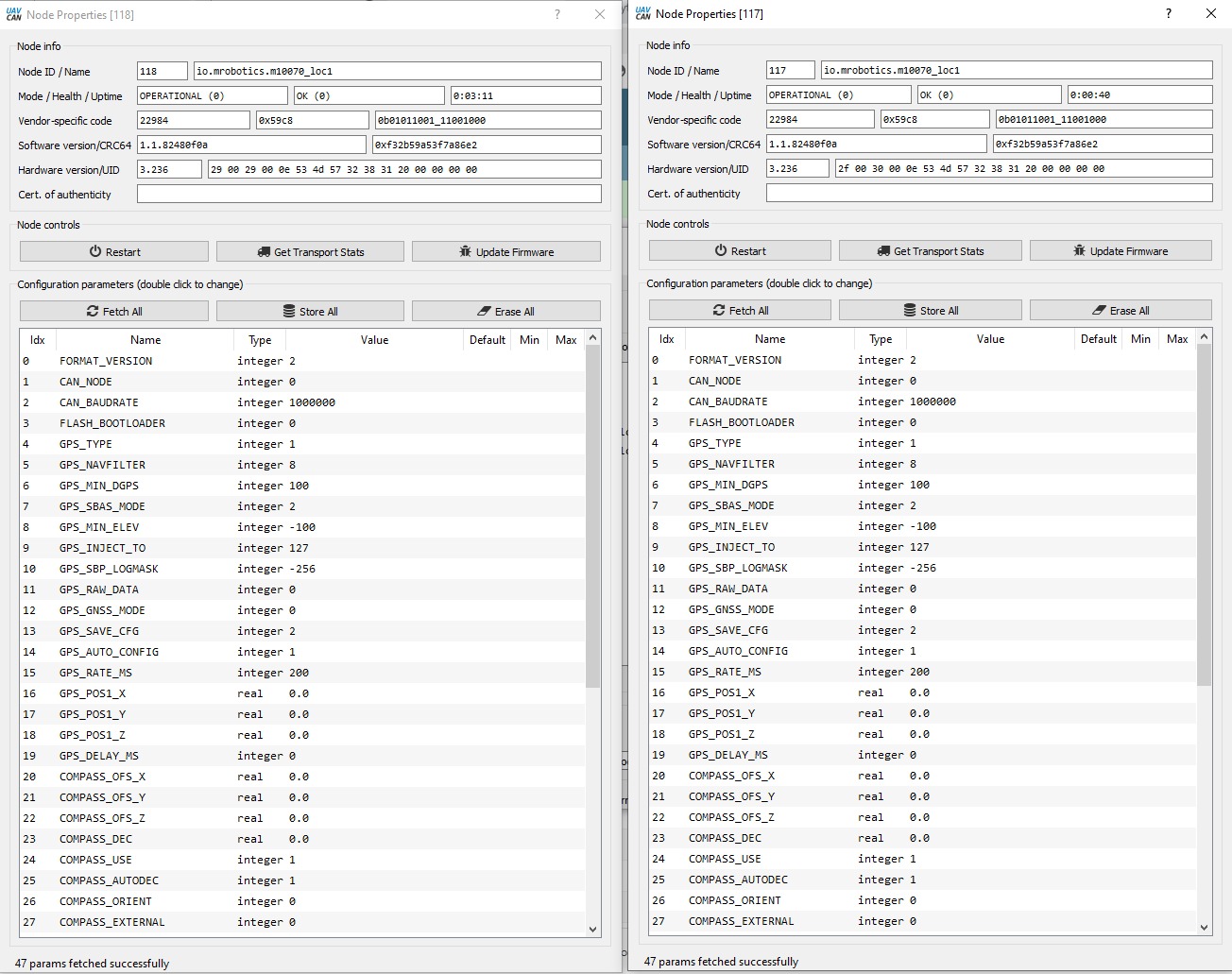
Can you elaborate regarding the differences between the versions?
I’d like mRo to handle this issue…
Log, Log 2
All the firmware are developed by the ardupilot community with the specifications of the manufacturer and the first releases of the firmware.
As ardupilot is an open source every firmware will have an upgrade that’s why always better update the firmwares.
for compare the difference its necessary check the drivers…
You were able perform the calibration?
aside all of that LocationOne perform very well
Yes, calibration passed, I’ll verify the functionality during the upcoming days.
Can you send me a link to the branch that this bin file was compiled from?
Thanks
1 Like
I’ve compiled the binary using Ubuntu from ardupilot git
1 Like
@Dave84 Your build seems to work well and calibration passed. Is this essentially the latest FW version of the AP_Periph?
Thanks
1 Like
i must check it… just in case i will build a more updated version if you need
1 Like
Thanks,
Please let me know so that I’ll be able to built it myself as well.
1 Like
Do you have Ubuntu for compile it?
1 Like
Hi,
Yes I do,
Thanks
1 Like
ok… just consider everyday there is a small update on the code…
1 Like
No problem, this version seems to work so I’d like to know the source.
1 Like
from ardupilot master
Is the 6-Pins JST-GH (Ublox UART) connector on the Location One the standard GPS connector as shown below?
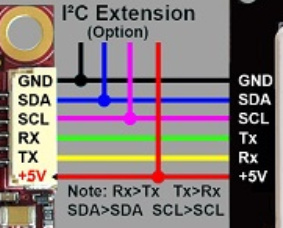
If so, I seem to be having trouble getting mine to connect to my pixracer with GPS_TYPE set to AUTO. Any ideas?
The reason I’m trying to connect it over the normal UART is so that I can run MAVSerial Passthrough to connect to the GPS with u-center wirelessly in order to run AssistNow Offline.
Good day, if you are using the mRo LocationOne one is a can gps so you need wire it on can bus port of your pixracer or other flight controller you are using right now.
Jst-gh 6 pin its for access the parameters for the ublox and you need the ftdi cable for it.
After you have wired you gps on can bus port of your fc, on MP just set can driver to 1…after this gps type… you must set to 9) uavcan)… reboot
Understood. I had it hooked up using UAVCAN previously and it was working fine. To confirm, is there no way to use MAVSerial with the LocationOne?
Maybe you can use mavserial using the ftdi cable… but i don’t have test it yet
Can you tell me the pinout of this Jst-gh plug? I can re-arrange some wires to connect it to a serial port on the pixracer.
Morning all.
Just installing my new Location one and have a couple questions.
First do I need to use a terminating resistor on the second can port. I assume yes as I have on other can devices but want to confirm.
Second my gps doesn’t have an I2C port. IT only has a single 6 pin JST-GH connector. I assume thats uart.
so if there is no I2C, then is the compass accessed by the flight controller via the UAVCAN port. I again assume yes but want to confirm.