Hello .
I want it to automatically turn around when returning home (RTL).
It appears in the parameter list by turning around or without changing direction at all.
I couldn’t find another source.
I would be glad if you could help me with this.
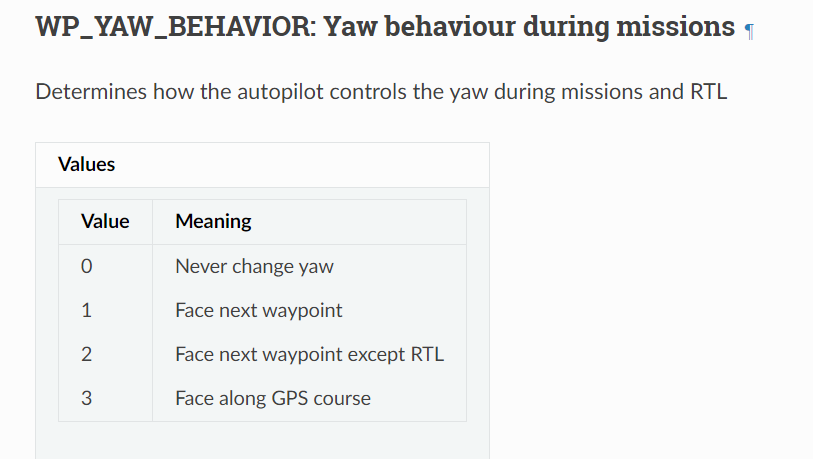
Please explain clearly what you want. WP_YAW_BEHAVIOR should be the only parameter you need to change.
What I want is for the device to come back in RTL mode.
These parameters do not exist.
–BACK NEXT WAYPOİNT–
Is the RTL not triggering correctly?
Is the copter flying in the wrong direction?
What EXACTLY is the problem?
When I say go home (RTL MODE ACTIVE), I want the head of the device to turn backwards.
I do not want the front of the device to look at the home position when coming home.
Actually I want to add another parameter and I don’t know how to do it.
That feature is not available. It is not fixable by adding a parameter. It is fixable by adding a new feature in the source code.
Can you do that? And create a github pull-request?
1 Like
Is this for a military application? We do not support using ArduPilot in military operations.
It is not a military project. The purpose is to look forward while coming back. I have a 2 axis gimbal.
Which source code needs to be edited? mode auto.cpp or mode rtl.cpp?
You mean look back (yaw = -180 relative to home) while doing RTL?
Yes.
I want exactly this.
Hello,
Adding parameters requires custom coding.
The behavior you want will require custom coding.
What is the purpose of doing RTL backwards?
I cannot imagine anything that will achieve, that can’t be achieved other ways.
Additionally, you don’t have to use RTL, you can just set waypoints, and other waypoint functions, that achieve the same actions, and have your heading in the desired orientation.
Being cagey makes it hard to help.
My goal is to be able to come home with observation in front of me when I switch to RTL mode.
Actually in WP_YAW_BEHAVIOR mode I want the version of the FACE TO NEXT POINT function with -180 degrees.
I opened this post thinking that I can do it easily from mode_rtl.cpp or mode_auto.cpp.
Should be easy, add a new enum value to the WP_YAW_BEHAVIOR and look around the code adding the desired functionality to each location where WP_YAW_BEHAVIOR gets used.
This is important function. Because of this, I don’t use RTL. I manually comeback my copter. because it is very inconvinient if I have to turn big copter 180 degrees
Can you do a GitHub pull request using the information I provided above?
If yes this can be fixed faster
Hi,
You might as well consider playing with the “Simple” and Super Simple modes enabled on RTL
Check how it works, here: Simple and Super Simple Modes — Copter documentation
I see your point, its much safer for new Pilots to take over after RTL without the copter been “nose-in” thus all movements seem reversed which is a common user error.
1 Like
for also novice pilot,
It is dangerous if something goes wrong(GPS glitch, EKF error) and it was nose-in situation
Those of you trying to sell this as a safety feature seem misled.
No pilot should be allowed to control a vehicle (especially of the size you’ve mentioned) unsupervised until he/she has enough experience to overcome the confusion that can be caused by flying nose-on.
This crutch doesn’t fix that.
1 Like
I think it is applied on small copters and undangerous situation,
It is much safer to coming back If the copter is big and If you think about safety.
I don’t say about the simple confusion, it is about the full control of copter including aerobatics abilities.
I disagree even more on big copters. Pilots who can’t handle them shouldn’t fly them.