ArduPilot now supports collective pitch quadcopters, which we are calling “HeliQuads”. The above video is the first flight test on a WLToys V383. The support for this type of airframe is in this pull request:
The control system for this quad uses independently controlled collective pitch on each of 4 rotors, with a single electric motor that powers all 4 rotors at the same RPM via belts and a torque tube. It is highly aerobatic, with extremely rapid control available.
As part of the support for this frame a new inverted-flight CH7_OPT was also added, which is available for all helicopter frame types. This allows you to fly any flight mode upside down, including AUTO missions. Here is the first test flight of inverted flight in ALT_HOLD
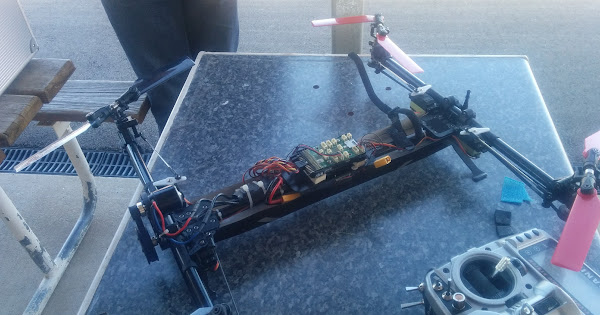
One thing to watch out for in this model is vibration. In the videos above vibration was running at between 6G and 8G, which is really far too much. The EKF was coping, but only just. I will be adding more mass to the flight controller and changing the mounting system for the next flight tests.
Here is a photo of the current mounting system:
Many thanks to members of CanberraUAV who helped out with the build and testing, especially Greg for his work on the build, and Justin for piloting the flight tests.
UPDATE: this has now been merged into ArduPilot master
Wren turbine with 700 size heli blades, maybe 4 blade heads…mmmmm
Now that would be a beast, but who would have the guts to fly it inverted, definitely not the one who paid to build it
I got a 44i that I bought run-out, used. I mounted it in a 600 frame but that was too small for it. I plan on putting in a scale model eventually. The engine won’t start anymore because the bearings are out of it.
The reality with them is that they only run 40-50 hours and you can buy four complete sets of 12S 5000 lipos for what it costs to send the engine to Wren Power Systems to get it rebuilt and rebalanced. And then it burns a little better than 2.4US gal/hr at 85% torque. If you try to run it below 85% torque they flame out. They have a maximum run time of 10 minutes or they’ll overheat and take the turbine wheel out of the gas generator. And 50 hours later it won’t start anymore and have to send it in and start the whole process over.
They’re great for scale models. Not so great for anything practical. A piston engine is 7-8x more fuel efficient for the same shaft horsepower.
I didn’t realize Wren had so many problems! I’ve got a Simjet 3000, strait turbine though mounted on a big sport jet. Been flying for 8 years… No bearings replaced yet. Yea, should probably replace them. But they’re still super smooth. Two years ago the ecu burned out so I replaced it with a Jetsmunt, which is way better anyways. I love to stand in the exhaust before takeoff lol! Probably should do that being the kero is mixed 4% with turbine oil, very toxic.
I wouldn’t say real problems. They’re just a high-maintenance, very inefficient engine. And they’re much larger and heavier than a comparable piston engine. Turbine power just does not scale down well from an efficiency and power/weight ratio standpoint.
I could see this quad-heli with a piston engine on it probably being quite practical and scaling up in size much better than a typical multi-rotor where you run into limitations in how fast you can throttle motors and speed up and slow down the interia of propellers. With collective pitch a quite large one of these things could probably be built and remain quite stable. I’m not sure it has any real efficiency advantages over a regular helicopter. But it is unique and that makes it worth experimenting with (and quite fun).
Will this be coming to Arduplane as well, and can it be used in conjunction with the tilt rotor code?
With this it will be possible to optimise the prop pitch for hover and forward cruise flight, and will likely allow significantly larger props to be used without control issues (even on smaller, low torque motors).
we could do that, although I don’t have any plans along those lines at the moment. I added HeliQuad support as Randy sent me a free one of these things (I believe someone sent him two of them, and he passed one along), and when I saw how much fun they are to fly with the stock controller I thought it would be really fun to get ArduPilot on it.
yes, a variant of a tilt-tricopter-quadplane with the front two rotors being variable pitch would make quite a lot of sense I think.
If you build one, I think you’ll probably be able to tempt me to write the code to support it
I’ll send you a version in the next few months. The airframe we’re testing atm is cruising on just 2A 4S and is under 1kg with nearly 7Ah of batteries. Still has space for a blood sample too of course. (we’re slowly getting the propulsion setup together now).
One thing I’ve been pondering is using the larger non-tilting rotor with blade pitch control so it can be used in “semi motorised” autorotation in forward flight like a gyro copter. I don’t know what the efficiencies would be, but I’d expect it to be better than a heli, but not as good as a wing. Which might make for an interesting compromise between range/endurance and at a minimum allow for small high aspect ratio high speed cruise wings. The more gradual transitions throughout the speed ranges would mean the main rotor would progressively reduce current with forward velocity but maintain enough main rotor RPM to create lift. So a pitch controlled tilt rotor gyro-tricopter…
It will at least have a bunch of variables!
With the pitch quad you’re using are the vibrations from the drivetrain layout or unbalanced props maybe? I saw a few utube videos saying the props weren’t very well balanced on that model. Also do you think tilting the CF arms forward will result in the belt drives losing tension and failing? I might have to get one to test, they’re pretty well priced on Gearbest (AUD$200).
In fact adding a pusher prop instead of tilt to the pitch quad could also be interesting in that the forward thrust created by the pusher would result in a very shallow pitch on the quad rotors, which could be semi auto rotating (meaning low current draw), and reducing forward consumption due to the fuselage being aligned with airflow etc. Would be cool try to see what dynamics result, the control authority should still be good with prop pitch control, unlike some conventional pusher quads I’ve made.
just send me photos when the hw is ready. I’ll develop the code in a simulator. You can debug the hardware
what cruise speed? Do you have photos of this plane?
The weight seems remarkable. 7Ah of 4S should weigh about 600g, so the rest of the plane is 400g? With VTOL?
I didn’t expect it to be more efficient. I do wonder if this opens up more options for longer flight times on quads. Not with this one of course, but with something that is purposely built for longer flight times.
Ok NP. I’ll do some pictures first when get back in the workshop and PM them.
Hardware debugging shouldn’t be too much of an issue, and you can always reverse SSH in over LTE in flight anyway. (Famous last words I know!).
Batteries are 2P4S 18650 that weigh 420g (50g a 3.4Ah cell)
Currently QP propulsion is 160g using 22g KDE 1806 and 4g ESC’s running 5"
Airframe including Pixhawk, Pi, picam LTE, RFD etc and 2206 fwd motor on 6" prop about 390g
Wings and vtail are clip on affairs with magnets with servo’s inboard with ~850mm wingspan, 560mm long about 2.5L of usable fuselage volume. Packs into a box 570x180x130mm which is backpackable, we’re aiming for under $500USD this time and a significant reduction in build time and custom parts compared to the Mozzie (although we still want to support that too)
These newer type batteries now run up to 30A so hover draw isn’t an issue. We’re hoping to cut down the cross section and maybe skim another 50-100g off the weight with the current avionics package configuration. Also hoping that our attempt to use a Mavic 3 axis gimbal for the picam will be successful as well. Ideally we’d finish our ESPilot autopilot, which would save weight and space and a bunch of wiring (being the same size as a pi zero) but we’d need to port Ardupilot to FreeRTOS on the ESP32 instead of running it on the pi zero in linux along with the picam imaging stuff, which leads to “unwanted” behaviour, as the pi CPU resources aren’t great. Using that we’d probably get the price around the $300-350AUD mark for a PNF tilt rotor tricopter version with HD FPV and CC. Ideal for beginners and educational use etc. for them to get into ArduPilot which is the target market, as well as for us to compete in the MEC2018 of course.
Lol sorry no it’s only a non-tilt non-collective QP with pusher prop atm. Hence the time frame of a few months.
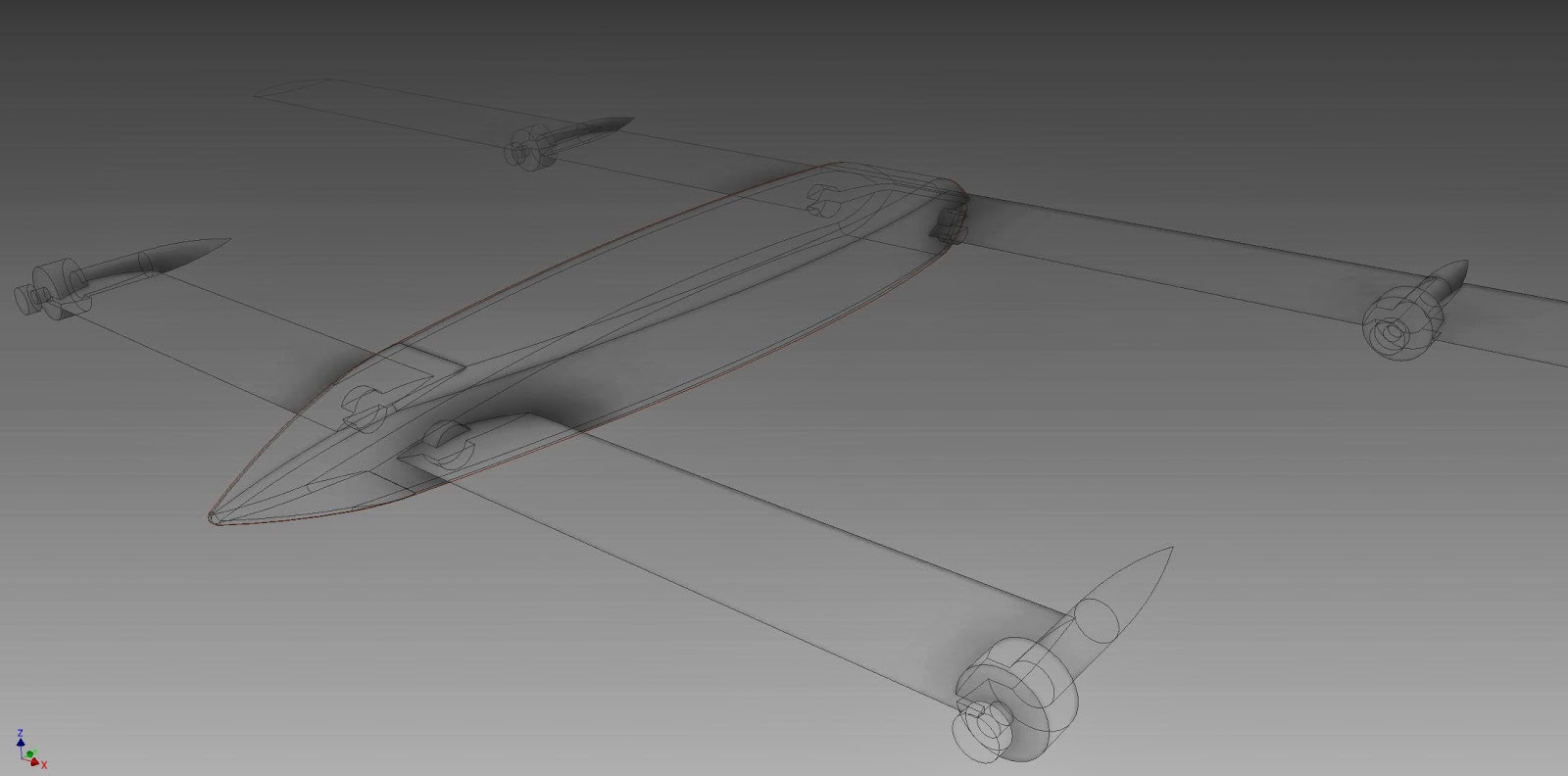
I do have the heli tail booms and propulsion etc here for it however from when I originally started looking at it back in 2013 and made this sketch to capture some ideas of the old version at the time (this was a tilt wing with collective):
I’ve been hoping for differential thrust to come along to get rid of the vertical stabilisers, yet another thing I still need to test seeing there’s code support for it now. (yay!)
The current flying airframe is a vtail QP though, so on that just the front quad arm canard would tilt with 5" props, and the rear quad arm motors would be replaced with a single motor with collective on a 10" prop. I was hoping for a box wing configuration maybe, but that’s not readily compacted down to put in a box for transport. We’re also looking at using the front canards (with thrust vectoring of the motors) as the primary control surface in forward flight, which would mean only two servos and three motors would suffice to control everything in hover or forward flight.
The benefit I see with these type of platforms is that they do not need to change orientation like tail/belly- sitters, and as such have better wind penetration and can have their props and motors optimised for forward cruise. Another variation I’m experimenting with is a removable wing version to see how far I can get just with the forward tilt props and main rotor, and what the endurance is at slow forward speeds, so the wings become optional to extend range.
I’ll do a tilt rotor version QP first, then a tricopter version before going with prop pitch control and see where the flight performance lands. I now have many, many hardware options in code that I can use for optimisation! Thx!
you could test the prop-pitch control with the current code by putting the pitch on a slider on the TX (or on a switch) which directly controls the pitch servos. So you could prove the concept and show if it really does increase efficiency before we complicate the code with support for it.
My guess is it would be worth it, but it’s just a guess.