Yeah ok that’s a good idea and would work for collective pitch testing. Would just have to limit the servo throws to a range it still has meaningful pitch so it doesn’t lose control, and then dial it in for optimum cruise.
I think the optimisation gain is mostly because of being able to have the best pitch in hover and in forward cruise, with forward cruise around 24m/s being a much steeper prop than what is required on the same motor whilst orientated for hover. With the tilt tricopter layout, we end up with a asymmetric drivetrain layout where the main 10" rotor (that doesn’t tilt) is producing some 60-70% of the lift in hover, whilst the two other tilt rotors (which also do yaw in hover) only do 15-20% of lift in hover each, and are essentially more for maintaining attitude control. That way with a fixed prop setup there’s some flexibility in that the forward tilt prop selection can be biased towards forward cruise, and the main rotor for hover, which then has to stop and stow for forward winged flight to reduce drag.
For the forward prop collective pitch version, the actual weighting needs to be determined in testing as using collective pitch might mean we can increase the bias to the main rotor in hover, if we can use reverse pitch on the forward tilt motors instead without it becoming unstable. (ie these would be used to “balance” on the main rotor) This wouldn’t be possible with a forward fixed prop at all as it wouldn’t have enough disk loading to maintain attitude control.
Also on the subject of determining optimum winged cruise, have you experimented, or have you done any tests to determine Carson’s velocity on winged airframes? (Ie best range is achieved at best glide slope speed)
A automated method for doing this would result in being able to determine the exact Carson’s velocity, and from that be able to accurately determine the required prop thrust and pitch requirements for each individual airframe, mass and configuration. Essentially this is like a airborne wind tunnel test using existing FC sensors onboard and some extra code (it can also be done manually). The simplest version without a AoA sensor would be to do a unpowered altitude hold test flight up to when it stalls ( and including stall if one wants to recover manually)
I’m not sure if this might be partially implemented in the soaring additions, or might be helpful there as well to tune airframes for optimum endurance or range. (1.316 of Carsons being best endurance and 1.316 above Carsons velocity best range)
The ArduPilot system is already capable of doing basic sport aerobatics like gentle loops or rolls. I would not push it to what most helicopters are capable of and start doing tic-tocs and inverted piros at 700 degrees/sec, and stuff like that. You have to keep it within what the EKF can cope with. I did put a APM 2.8 with AC3.2.1 in a Trex 500L Dominator some time back. Internal compass, no GPS, only Acro and Stabilize flight mode set up in it. No PID’s, just use FF and set the rate and expo in the radio. It handled full scale hard 3D with no problems, bring it in and flip to attitude (Stabilize) mode and it still hovered stable. Pretty cheap $25 FBL unit. But I don’t think the Pixhawk/EKF is capable of that.
I don’t think this design is going to shine as a longer flight time quad-rotor. A conventional helicopter with the same power will beat it in efficiency every time.
Where it could shine is as a heavy lift platform. I don’t know if it would be as stable as a conventional helicopter though. Russian engineers played with multi-rotor helicopter designs back in the 70’s. But the heavy lift platform that eventually went into series production and remains today the largest and most powerful helicopter on earth is the Mil Mi-26 “Halo”. It has a main rotor diameter equal to the wingspan of a AirBus A320 and almost 23,000 shaft horsepower. This helicopter is so powerful it has rescued broken Chinooks off the side of a mountain in Afghanistan that the US Military’s CH-53E Super Stallion can’t lift, and it can lift airliners with ease and fly away with them. It is the only one that exists that can do that sort of stuff - and it is a single rotor design.
Physics and losses in multiple drives is what prevents any multi-rotor design from being very efficient in rotary wing aircraft.
the inverted flight option is enabled for normal helicopters too. I’ve only tested that in a simulator, but as long as you have a good collective range I’d expect inverted flight to work well on single helis
I think there is great potential for extending flight times with a collective pitch multirotor like this. Efficiency and endurance or range performance are not necessarily synonymous in multi rotors, as they have other constraints, like their energy source that restrict their performance. Likewise speed, endurance and range aren’t the same set of constraints, and different solutions apply. The primary driving factor for hover efficiency in rotor aircraft is disk loading, with tip losses only a secondary concern, meaning having multiple disks/props is not necessarily much worse. Drivetrain losses are a separate issue, but are unlikely to be better in a collective quad drivetrain than in a heli. There’s also other issues like prop strike energy and public safety etc, depending on the type and size of multicopter used, and where they are operated, that need to be considered.
However, most multi’s are range and endurance limited by their battery energy density which need not be the case with these type of collective quads. Because the flight control is decoupled from the motors and RPM independant with a collective quad, it’s much easier to make them fuel powered, which gives them a massive advantage in energy density, that despite the low fuel to power conversion efficiency of small combustion engines, still leaves it at a considerable advantage in comparison to battery powered mulit’s.
Like this nitro modified version of nearly the identical collective quad frame:
Another advantage with a collective pitch quad is that control response is not as limited to rotor size and motor torque, meaning that larger props can be used on a quad and still have enough control authority. That in turn would result in a lower disk loading. Like with most fuel powered machines, vIbration and other factors like fuel handling and safety also need to be considered depending on the application if using a fuel powered quad.
Primarily, fuel powered quads would be good for long endurance in hover, but I think adding wings to an electric quad would be better for longer range like with a quadplane. Collective pitch control is also of high interest for hybrid vehicles, especially those with wings like tilt quadplanes and tailsitters etc, as they would allow propellor pitch optimisation for both hover and forward flight. Overall I find this addition very valuable as other types of aircraft and propulsion emerge.
Although this one has been quiet now for a year, I was following it’s development closely.
What they were really missing by the look of it was this Arducopter firmware update
So I just had to share the link
I thought there airframe concept and design looked very promising.
While this may be an optimistic view of multi-rotor aircraft, it’s actually WAY worse. The induced drag and power wasted in tip losses is the primary concern.
Take the example of a typical 600-class RC helicopter with a 1.4m main rotor. At the same takeoff weight to have the same disc loading you need to build a quadrotor aircraft with four 700mm propellers on it. Do the math on the rotor disc circumference on the two designs. The quadrotor design is double what the helicopter is.
Cruise the helicopter with the 55" main rotor in ETL at 15m/s airspeed and it will cruise on 111 watts/kg of aircraft weight, assuming 5.9kg takeoff weight. The quadrotor with the 27.6" props to match it for disc loading will require 165-200watts/kg (depending on what motors and props are used) at the same takeoff weight at the same speed. Even my winged TriCopter design, which is the most efficient multi-rotor I ever came up, cannot compete with any helicopter in cruise power efficiency, despite the fact the TriCopter has a 1m wingspan.
Multi-rotors have not re-written the laws of physics and aerodynamics in rotary wing aircraft, and they’re not likely to any time soon. Their primary attraction is ease of construction because they’re mechanically simple (although electrically complex) and the advent of flight controllers that makes them easy for anybody to fly. Brilliant marketing has made them popular, not efficiency.
On a well designed rotor most of the lift induced drag is from the lift generated by moving the rotor blade/airfoil through the air, which keeps the aircraft airborne and lifts it against gravity. Like wings on a airplane. On a plane, as on a rotorcraft, this needs to be externally powered to sustain level flight, and on a well designed aircraft or rotorcraft this is the primary cause of energy consumption, (apart from when high forward velocity takes over)
In comparison the wingtips do not produce much in the way of lift, but do create drag from turbulent separated flow. For the wingtip to be the primary consumer of energy to drive a rotor blade through the air would mean that the wingtip turbulence is using more energy than the rotor (wing) is to produce lift. I’d imagine this would be a very weird looking rotor, with parachutes on the tips.
I can agree with the statement that rotor tip losses are the primary efficiency loss after lift induced drag however.
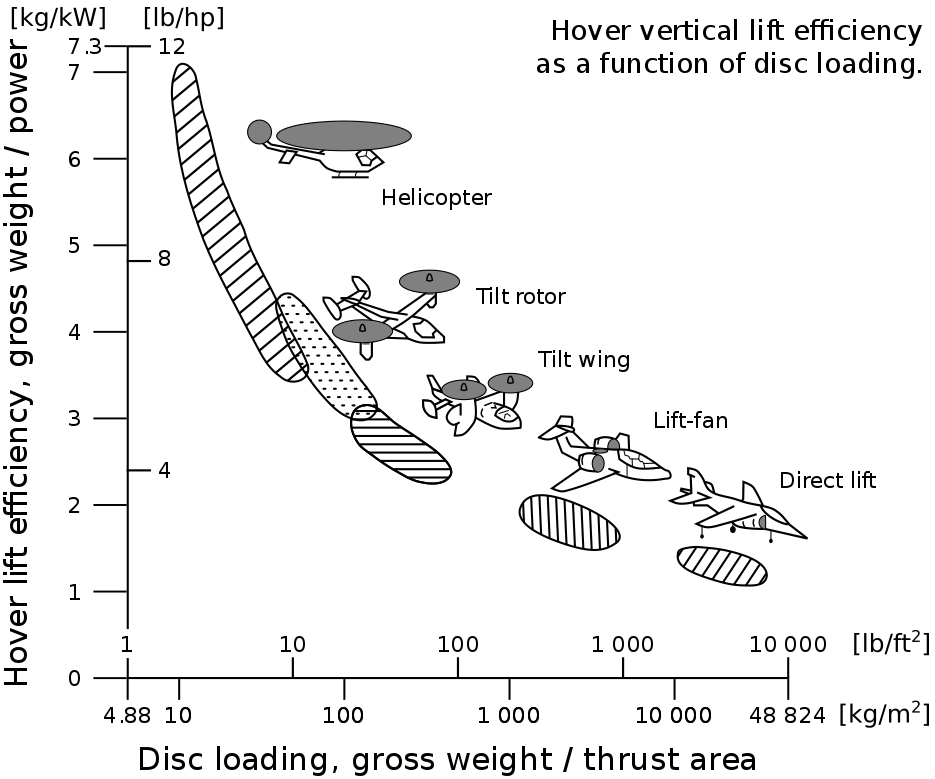
This is an interesting representation on the subject of disk loading that compares the relative lift efficiencies of VTOL aircraft. (that doesn’t show tip losses as a factor however)
Hover efficiency in a VTOL design is only part of the overall picture. VTOL aircraft are not designed to only hover. Overall flight efficiency in a combination of hover and cruise flight is what matters. If you’re only going to hover, a tethered lighter-than-air-balloon is the most power efficient.
The amount of available lift of a VTOL rotor is directly proportional to blade speed V (in L = 1/2 ρ V^2 S), the limitation being the blade tips can’t exceed Mach. And performance by disc solidity. Even with modern twisted (washout) VTOL airfoils with BERP tips the smaller the rotors, the proportionately faster they have to turn to create the same lift on the same power, and the outer 1/3 of the blade does the most work. As the number of blades in the system increases, the interaction of subsequent blade(s) with the adjacent blade’s vortex increase (i.e the blade flies into the preceding blade’s wake), which affects the lift produced. And is the reason a multi-rotor design is an aerodynamic mess when it tries to move and go anywhere.
I did some testing with various commercially avialable helicopter airfoils and blade tip designs on a 600-class machine. I bought four different sets of blades at IRCHA to test them. I found as much as 150 watts difference in hover power between the best and the worst - all related to tip losses and airfoil type at the same headspeed and takeoff weight.
Maybe a bit out of scope for the thread discussion here to go into detail about propellor design. My post was intended to answer the pros and cons of cyclops question being:
To that I would generally say the answer is yes, without a doubt. The conversation has now turned to tip vortex versus lift induced drag power comparison. My point was that tip vortices are not the primary reason for energy consumption to produce lift for hover, specifically I said:
Nowhere did I say the quad had to have smaller propellers, in fact the intention was quite the opposite, in that I was saying that a collective pitch quad could now finally have the same disc loading as a helicopter with this FC code addition, in that:
As for the forward propulsion of multicopters and their aerodynamic inefficiency, I have long given up on trying to pitch their nose down and use brute force to propel them through the air in a aerodynamic maelstrom and since 2013 my multicopters have been pushers like this: (this is the first one I made, flies at 90kmh on about 5A more current than with hover)
Further if the intention is to make a aircraft have a more efficient endurance or range, then the efficiency of a wing is best by far and much better than a helicopter/rotorcraft can ever be. The VTOL components and efficiency on a quadplane can be even further neglected because they only operate for less than 1 minute of flight time to VTOL. The addition of collective pitch control is of value to improve forward cruise efficiency, as this allows the propeller pitch and thrust to be optimized to overcome drag in forward flight and can also be optimised for hover on a tilt QP.
In fact the Eurocopter X3 uses similar principles to achieve it’s high speed and range by using wings (for 80% of lift in forward flight) and forward facing props for propulsion. The main rotor is not contributing much in forward flight at all, and is essentially the same way a QP works, just with less props. This is where state of the art rotor craft are heading atm from what I can tell.
Yes I do have one. I have some experience setting up and flying multirotors with Arducopter and APMs and Pixhawks but no experience with helis, so it’s been sitting in it’s box for a while in the shed.
then connect output 8 to the motor control (you can use a different output if you don’t have 8 output channels on your board, such as with a pixracer).
Load the arducopter-heli firmware. Load the parameters I have for my frame from here:
Check if you have an X or H frame. If front-right motor spins clockwise you have a H frame. If counter-clockwise you have an X frame. I have an H frame, so I set FRAME_TYPE=3. If you have an X frame then set FRAME_TYPE=1.
Setup your transmitter in the usual way, but you need an “interlock” switch on RC channel 8. When the interlock is low the motors will be off (and it will allow you to arm). After you arm if you raise that switch the motor will start.
Before you connect the battery do initial tests with the belt removed from the motor, so the servos move, but motor doesn’t. Check it is moving servos to stabilize correctly in STABILIZE mode.
Then get ready for first flight. If you’d like to work with me remotely on that then let me know.
Thanks for that information, it will be very helpful. It will take me a few days before I can proceed, maybe early next week. The only Ardupilot capable FC I have not in use right now is either one of several APMs or a Micro Pixhawk. If none of these are likely to be the best choice I will either take one out of something else or buy another.
The old APMs won’t work - it needs to be a 32 bit board.
The MicroPixhawk should work fine, but make sure you have good vibration isolation. Maybe add some weight to the flight board (a bit of lead) to make it heavier too.
For initial tests in STABILIZE and ALT_HOLD you won’t need a GPS (I did my first flights with no GPS, then added one when I wanted to test LOITER).
I think all of these that are currently on the market are a clone or copy of the Curtis Youngblood Stingray 500 circa ~2013. Curtis did not have good sales results with them and many people reported on HeliFreak that vibration issues constantly bricked FBL units and caused repeated crashes. I think Curtis eventually sold the design to one of the Chinese manufacturers (WLToys?) and no longer sells the Stingray 500. I’m pretty sure he still has it on his website, but there’s no parts or units available anymore.
I also think that Ekf can not handle high-speed mobile data, so want to use Pixhawk’s accelerometer to achieve “one key rescue machine” function seems to be impossible to achieve. But how did Stanford University’s automatic 3D flight of a remote helicopter take place a few years ago?