Greetings, friends. For about half a year, I’ve been exploring the capabilities of the ArduPilot firmware, experimenting with autonomous drone flights indoors. At one point, I managed to get the drone to complete this task on firmware version 4.4.4, but now I can’t recall how I did it. I’ve learned so much that I can’t remember everything and retrace my steps.
Meanwhile, I’ve seen forum posts mentioning that LOITER works without issues, but these usually refer to older firmware versions. Special thanks to user Jai.GAY for trying to help solve the problem.
Since then, I’ve updated the firmware twice, added an external compass, installed a new battery, configured FFT, and ran Autotune. Now, after a week of troubleshooting, I still can’t get the drone to fly in LOITER mode without GPS. I even tried reverting to version 4.4.4 but had no success. My last hope was a clean firmware installation and setup from scratch.
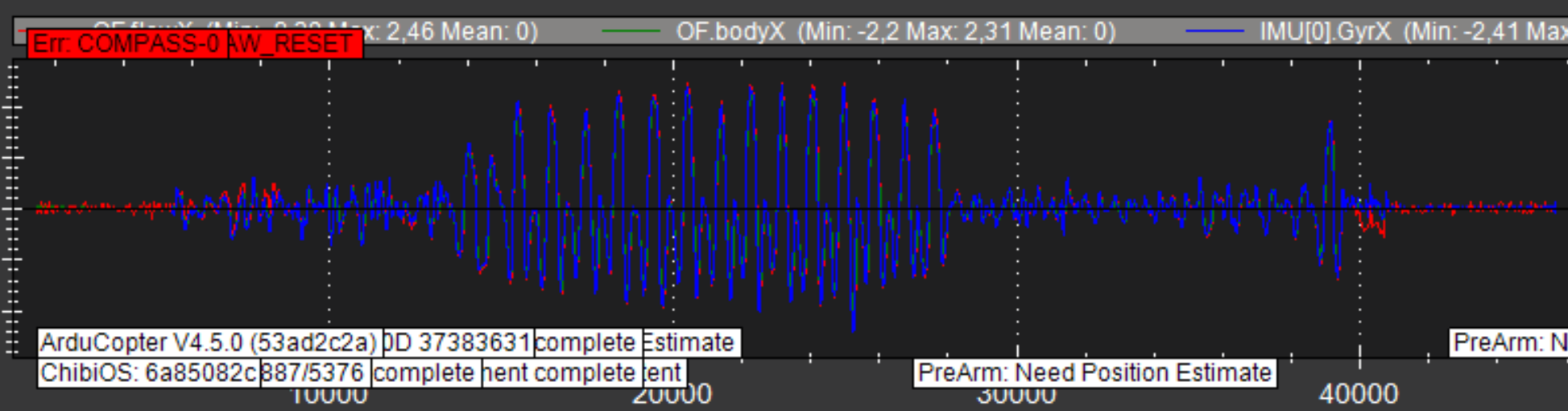
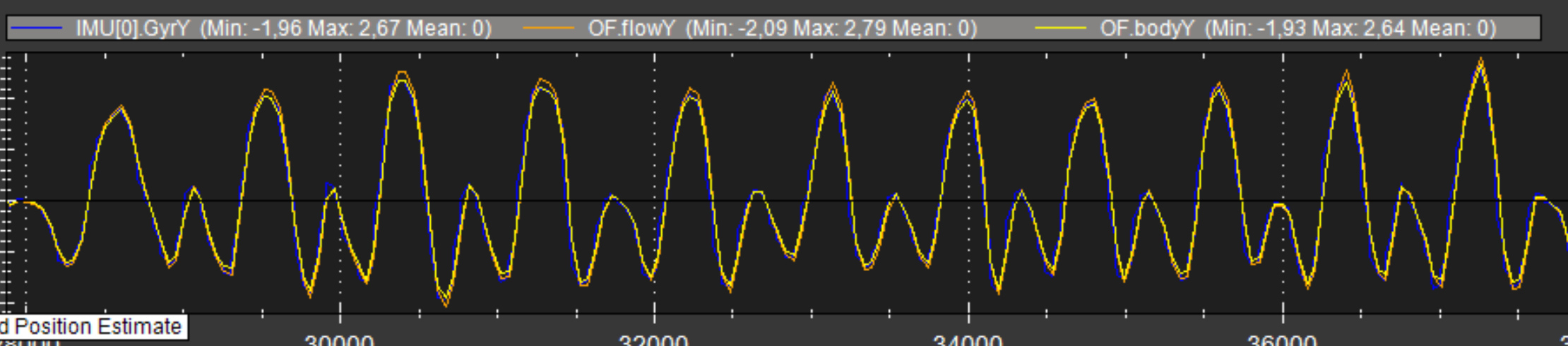
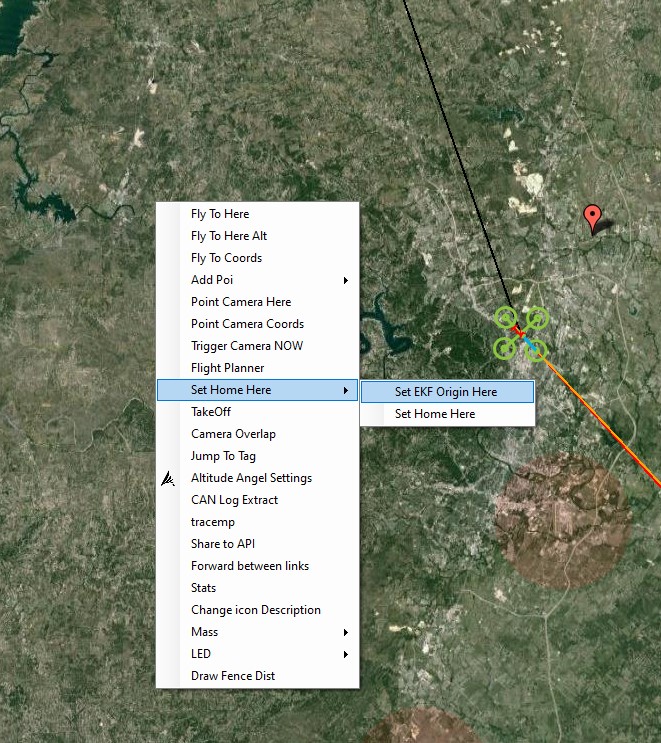
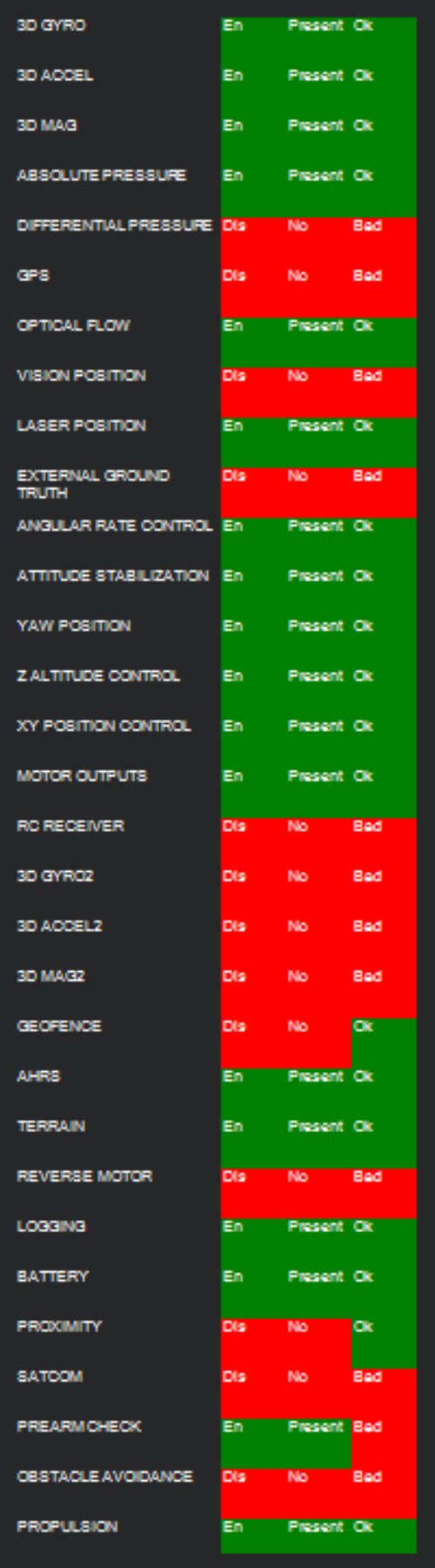
I installed version 4.5.0. In the screenshot, you can see the rangefinder (TF Mini Plus) is giving correct altitude readings, and the optical flow (PX4FLOW) is also working. ARMING_OPTIONS = 0. EKF origin is set.

Prearm log shows one ERR and the following MSG:
00:00:10.592, ERR, 10592661, 3, 0, COMPASS-0
00:00:10.608, MSG, 10608454, ArduCopter V4.5.0 (53ad2c2a),
00:00:10.608, MSG, 10608462, ChibiOS: 6a85082c,
00:00:10.608, MSG, 10608480, CUAV-Nora 00420023 3532510D 37383631,
00:00:10.608, MSG, 10608489, Param space used: 877/5376,
00:00:10.608, MSG, 10608508, RC Protocol: None,
00:00:10.608, MSG, 10608537, RCOut: PWM:1-14,
00:00:10.608, MSG, 10608543, New mission,
00:00:10.608, MSG, 10608549, New rally,
00:00:10.608, MSG, 10608554, New fence,
00:00:10.608, MSG, 10608568, Frame: QUAD/X,
00:00:12.497, MSG, 12497951, EKF3 IMU0 initialised,
00:00:12.498, MSG, 12498401, EKF3 IMU1 initialised,
00:00:12.500, MSG, 12500194, AHRS: EKF3 active,
00:00:13.910, MSG, 13910051, EKF3 IMU0 tilt alignment complete,
00:00:13.910, MSG, 13910089, EKF3 IMU1 tilt alignment complete,
00:00:13.995, MSG, 13995223, EKF3 IMU0 MAG0 initial yaw alignment complete,
00:00:13.997, MSG, 13997731, EKF3 IMU1 MAG0 initial yaw alignment complete,
00:00:25.495, MSG, 25495903, GCS: Mission Planner 1.3.82,
00:00:25.495, MSG, 25495965, GCS: Mission Planner 1.3.82,
00:00:25.496, MSG, 25496074, GCS: Mission Planner 1.3.82,
00:00:26.705, MSG, 26705370, ArduCopter V4.5.0 (53ad2c2a),
00:00:26.705, MSG, 26705384, ChibiOS: 6a85082c,
00:00:26.705, MSG, 26705403, CUAV-Nora 00420023 3532510D 37383631,
00:00:26.705, MSG, 26705419, RCOut: PWM:1-14,
00:00:26.705, MSG, 26705442, IMU0: fast sampling enabled 8.0kHz/2.0kHz,
00:00:26.705, MSG, 26705460, IMU1: fast sampling enabled 2.0kHz,
00:00:26.705, MSG, 26705482, IMU2: fast sampling enabled 8.0kHz/2.0kHz,
00:00:26.705, MSG, 26705495, Frame: QUAD/X,
00:00:27.087, MSG, 27087863, ArduCopter V4.5.0 (53ad2c2a),
00:00:27.087, MSG, 27087876, ChibiOS: 6a85082c,
00:00:27.087, MSG, 27087895, CUAV-Nora 00420023 3532510D 37383631,
00:00:27.087, MSG, 27087911, RCOut: PWM:1-14,
00:00:27.087, MSG, 27087942, IMU0: fast sampling enabled 8.0kHz/2.0kHz,
00:00:27.087, MSG, 27087960, IMU1: fast sampling enabled 2.0kHz,
00:00:27.087, MSG, 27087982, IMU2: fast sampling enabled 8.0kHz/2.0kHz,
00:00:27.087, MSG, 27087995, Frame: QUAD/X,
00:00:27.205, MSG, 27205545, ArduCopter V4.5.0 (53ad2c2a),
00:00:27.205, MSG, 27205558, ChibiOS: 6a85082c,
00:00:27.205, MSG, 27205577, CUAV-Nora 00420023 3532510D 37383631,
00:00:27.205, MSG, 27205593, RCOut: PWM:1-14,
00:00:27.205, MSG, 27205721, IMU0: fast sampling enabled 8.0kHz/2.0kHz,
00:00:27.205, MSG, 27205742, IMU1: fast sampling enabled 2.0kHz,
00:00:27.205, MSG, 27205764, IMU2: fast sampling enabled 8.0kHz/2.0kHz,
00:00:27.205, MSG, 27205778, Frame: QUAD/X,
00:00:30.493, MSG, 30493378, PreArm: Gyros inconsistent,
00:00:30.493, MSG, 30493555, PreArm: Need Position Estimate,
00:00:36.062, MSG, 36062838, EKF3 IMU0 origin set,
00:00:36.062, MSG, 36062853, EKF3 IMU1 origin set,
00:00:36.093, MSG, 36093185, Field Elevation Set: 64m,
00:00:52.100, MSG, 52100591, PreArm: Need Position Estimate,
00:01:01.493, MSG, 61493495, PreArm: Need Position Estimate,
00:01:13.307, MSG, 73307992, RCInput: decoding PPM(2),
00:01:13.592, MSG, 73592830, RC6: MotorEStop LOW,
00:01:20.692, MSG, 80692979, Arm: Need Position Estimate,
00:01:22.692, MSG, 82692981, Arm: Need Position Estimate,
00:01:30.192, MSG, 90192990, Arm: Need Position Estimate,
00:01:32.493, MSG, 92493550, PreArm: Need Position Estimate,
00:01:47.392, MSG, 107392988, Arm: Need Position Estimate,
00:02:03.493, MSG, 123493543, PreArm: Need Position Estimate,
00:02:21.192, MSG, 141192993, Arm: Need Position Estimate,
00:02:26.493, MSG, 146493011, Arm: Need Position Estimate,
00:02:34.493, MSG, 154493637, PreArm: Need Position Estimate,
00:02:35.892, MSG, 155892991, Arm: Need Position Estimate,
00:02:37.892, MSG, 157892988, Arm: Need Position Estimate,
00:02:41.692, MSG, 161692986, Arm: Need Position Estimate,
00:03:05.493, MSG, 185493637, PreArm: Need Position Estimate,
From what I remember during the setup and tests, there was always a compass error. I’m not sure what it means, and searching the forum didn’t clarify things. Mag field and Mag2 field are showing changing data. Compass recalibration has been done several times. Accelerometer recalibration as well.
The parameters seem to be set correctly:
ACRO_BAL_PITCH,1
ACRO_BAL_ROLL,1
ACRO_OPTIONS,0
ACRO_RP_EXPO,0.3
ACRO_RP_RATE,360
ACRO_RP_RATE_TC,0
ACRO_THR_MID,0
ACRO_TRAINER,2
ACRO_Y_EXPO,0
ACRO_Y_RATE,202.5
ACRO_Y_RATE_TC,0
ADSB_TYPE,0
AHRS_COMP_BETA,0.1
AHRS_EKF_TYPE,3
AHRS_GPS_GAIN,1
AHRS_GPS_MINSATS,6
AHRS_GPS_USE,1
AHRS_OPTIONS,0
AHRS_ORIENTATION,0
AHRS_RP_P,0.2
AHRS_TRIM_X,-0.0187321
AHRS_TRIM_Y,0.0032961
AHRS_TRIM_Z,0
AHRS_WIND_MAX,0
AHRS_YAW_P,0.2
ANGLE_MAX,3000
ARMING_ACCTHRESH,0.75
ARMING_CHECK,173494
ARMING_MAGTHRESH,100
ARMING_MIS_ITEMS,0
ARMING_OPTIONS,0
ARMING_RUDDER,2
ARSPD_ENABLE,0
ATC_ACCEL_P_MAX,116700
ATC_ACCEL_R_MAX,116700
ATC_ACCEL_Y_MAX,27000
ATC_ANG_LIM_TC,1
ATC_ANG_PIT_P,4.5
ATC_ANG_RLL_P,4.5
ATC_ANG_YAW_P,4.5
ATC_ANGLE_BOOST,1
ATC_INPUT_TC,0.15
ATC_RAT_PIT_D,0.0036
ATC_RAT_PIT_D_FF,0
ATC_RAT_PIT_FF,0
ATC_RAT_PIT_FLTD,21
ATC_RAT_PIT_FLTE,0
ATC_RAT_PIT_FLTT,21
ATC_RAT_PIT_I,0.135
ATC_RAT_PIT_IMAX,0.5
ATC_RAT_PIT_NEF,0
ATC_RAT_PIT_NTF,0
ATC_RAT_PIT_P,0.135
ATC_RAT_PIT_PDMX,0
ATC_RAT_PIT_SMAX,0
ATC_RAT_RLL_D,0.0036
ATC_RAT_RLL_D_FF,0
ATC_RAT_RLL_FF,0
ATC_RAT_RLL_FLTD,21
ATC_RAT_RLL_FLTE,0
ATC_RAT_RLL_FLTT,21
ATC_RAT_RLL_I,0.135
ATC_RAT_RLL_IMAX,0.5
ATC_RAT_RLL_NEF,0
ATC_RAT_RLL_NTF,0
ATC_RAT_RLL_P,0.135
ATC_RAT_RLL_PDMX,0
ATC_RAT_RLL_SMAX,0
ATC_RAT_YAW_D,0
ATC_RAT_YAW_D_FF,0
ATC_RAT_YAW_FF,0
ATC_RAT_YAW_FLTD,0
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,21
ATC_RAT_YAW_I,0.018
ATC_RAT_YAW_IMAX,0.5
ATC_RAT_YAW_NEF,0
ATC_RAT_YAW_NTF,0
ATC_RAT_YAW_P,0.18
ATC_RAT_YAW_PDMX,0
ATC_RAT_YAW_SMAX,0
ATC_RATE_FF_ENAB,1
ATC_RATE_P_MAX,0
ATC_RATE_R_MAX,0
ATC_RATE_Y_MAX,0
ATC_SLEW_YAW,6000
ATC_THR_G_BOOST,0
ATC_THR_MIX_MAN,0.1
ATC_THR_MIX_MAX,0.5
ATC_THR_MIX_MIN,0.1
AUTO_OPTIONS,0
AUTOTUNE_AGGR,0.1
AUTOTUNE_AXES,7
AUTOTUNE_MIN_D,0.001
AVD_ENABLE,0
AVOID_ACCEL_MAX,3
AVOID_ALT_MIN,0
AVOID_ANGLE_MAX,1000
AVOID_BACKUP_DZ,0.1
AVOID_BACKUP_SPD,0.75
AVOID_BEHAVE,0
AVOID_DIST_MAX,5
AVOID_ENABLE,3
AVOID_MARGIN,2
BARO_ALT_OFFSET,0
BARO_ALTERR_MAX,2000
BARO_EXT_BUS,-1
BARO_FIELD_ELV,0
BARO_FLTR_RNG,0
BARO_GND_TEMP,0
BARO_OPTIONS,0
BARO_PRIMARY,0
BARO_PROBE_EXT,0
BARO1_DEVID,721186
BARO1_GND_PRESS,99672.04
BARO1_WCF_ENABLE,0
BARO2_DEVID,721202
BARO2_GND_PRESS,99606.24
BARO2_WCF_ENABLE,0
BARO3_DEVID,0
BARO3_GND_PRESS,0
BARO3_WCF_ENABLE,0
BATT_ARM_MAH,0
BATT_ARM_VOLT,22.7
BATT_CAPACITY,3300
BATT_CRT_MAH,0
BATT_CRT_VOLT,21.6
BATT_CURR_MULT,1
BATT_FS_CRT_ACT,0
BATT_FS_LOW_ACT,0
BATT_FS_VOLTSRC,0
BATT_LOW_MAH,0
BATT_LOW_TIMER,10
BATT_LOW_VOLT,22.2
BATT_MONITOR,8
BATT_OPTIONS,0
BATT_SERIAL_NUM,-1
BATT2_MONITOR,0
BATT3_MONITOR,0
BATT4_MONITOR,0
BATT5_MONITOR,0
BATT6_MONITOR,0
BATT7_MONITOR,0
BATT8_MONITOR,0
BATT9_MONITOR,0
BCN_TYPE,0
BRD_BOOT_DELAY,0
BRD_HEAT_I,0.07
BRD_HEAT_IMAX,70
BRD_HEAT_LOWMGN,0
BRD_HEAT_P,50
BRD_HEAT_TARG,45
BRD_OPTIONS,1
BRD_RTC_TYPES,1
BRD_RTC_TZ_MIN,0
BRD_SAFETY_DEFLT,0
BRD_SAFETY_MASK,16368
BRD_SAFETYOPTION,3
BRD_SD_FENCE,0
BRD_SD_MISSION,0
BRD_SD_SLOWDOWN,0
BRD_SER1_RTSCTS,2
BRD_SER2_RTSCTS,2
BRD_SERIAL_NUM,0
BRD_VBUS_MIN,4.3
BRD_VSERVO_MIN,0
BTN_ENABLE,0
CAM_AUTO_ONLY,0
CAM_MAX_ROLL,0
CAM_RC_TYPE,0
CAM1_TYPE,0
CAM2_TYPE,0
CAN_D1_PROTOCOL,1
CAN_D1_PROTOCOL2,0
CAN_D1_UC_ESC_BM,0
CAN_D1_UC_ESC_OF,0
CAN_D1_UC_ESC_RV,0
CAN_D1_UC_NODE,10
CAN_D1_UC_NTF_RT,20
CAN_D1_UC_OPTION,0
CAN_D1_UC_POOL,16384
CAN_D1_UC_RLY_RT,0
CAN_D1_UC_SER_EN,0
CAN_D1_UC_SRV_BM,0
CAN_D1_UC_SRV_RT,50
CAN_D2_PROTOCOL,1
CAN_D2_PROTOCOL2,0
CAN_LOGLEVEL,0
CAN_P1_BITRATE,1000000
CAN_P1_DRIVER,1
CAN_P1_FDBITRATE,4
CAN_P2_DRIVER,0
CAN_SLCAN_CPORT,0
CAN_SLCAN_SDELAY,1
CAN_SLCAN_SERNUM,-1
CAN_SLCAN_TIMOUT,0
CHUTE_ENABLED,0
CIRCLE_OPTIONS,1
CIRCLE_RADIUS,1000
CIRCLE_RATE,20
COMPASS_AUTO_ROT,2
COMPASS_AUTODEC,1
COMPASS_CAL_FIT,16
COMPASS_DEC,0
COMPASS_DEV_ID,1114642
COMPASS_DEV_ID2,658945
COMPASS_DEV_ID3,0
COMPASS_DEV_ID4,0
COMPASS_DEV_ID5,0
COMPASS_DEV_ID6,0
COMPASS_DEV_ID7,0
COMPASS_DEV_ID8,0
COMPASS_DIA_X,1.048825
COMPASS_DIA_Y,0.9749389
COMPASS_DIA_Z,1.055417
COMPASS_DIA2_X,1.042529
COMPASS_DIA2_Y,0.9618879
COMPASS_DIA2_Z,0.9547009
COMPASS_DIA3_X,1
COMPASS_DIA3_Y,1
COMPASS_DIA3_Z,1
COMPASS_DISBLMSK,0
COMPASS_ENABLE,1
COMPASS_EXTERN2,1
COMPASS_EXTERN3,0
COMPASS_EXTERNAL,0
COMPASS_FLTR_RNG,0
COMPASS_LEARN,0
COMPASS_MOT_X,0
COMPASS_MOT_Y,0
COMPASS_MOT_Z,0
COMPASS_MOT2_X,0
COMPASS_MOT2_Y,0
COMPASS_MOT2_Z,0
COMPASS_MOT3_X,0
COMPASS_MOT3_Y,0
COMPASS_MOT3_Z,0
COMPASS_MOTCT,0
COMPASS_ODI_X,-0.0061176
COMPASS_ODI_Y,-0.0077399
COMPASS_ODI_Z,-0.0044484
COMPASS_ODI2_X,-0.0182022
COMPASS_ODI2_Y,0.0204654
COMPASS_ODI2_Z,-0.0300667
COMPASS_ODI3_X,0
COMPASS_ODI3_Y,0
COMPASS_ODI3_Z,0
COMPASS_OFFS_MAX,1800
COMPASS_OFS_X,13.60677
COMPASS_OFS_Y,77.84985
COMPASS_OFS_Z,-78.62783
COMPASS_OFS2_X,-181.3936
COMPASS_OFS2_Y,-62.56103
COMPASS_OFS2_Z,-33.23126
COMPASS_OFS3_X,0
COMPASS_OFS3_Y,0
COMPASS_OFS3_Z,0
COMPASS_OPTIONS,0
COMPASS_ORIENT,0
COMPASS_ORIENT2,6
COMPASS_ORIENT3,0
COMPASS_PMOT_EN,0
COMPASS_PRIO1_ID,1114642
COMPASS_PRIO2_ID,658945
COMPASS_PRIO3_ID,0
COMPASS_SCALE,0
COMPASS_SCALE2,0
COMPASS_SCALE3,0
COMPASS_USE,1
COMPASS_USE2,1
COMPASS_USE3,0
CUST_ROT_ENABLE,0
DEV_OPTIONS,0
DISARM_DELAY,10
EAHRS_TYPE,0
EFI_TYPE,0
EK3_ABIAS_P_NSE,0.02
EK3_ACC_BIAS_LIM,1
EK3_ACC_P_NSE,0.35
EK3_AFFINITY,0
EK3_ALT_M_NSE,2
EK3_BCN_DELAY,50
EK3_BCN_I_GTE,500
EK3_BCN_M_NSE,1
EK3_BETA_MASK,0
EK3_CHECK_SCALE,100
EK3_DRAG_BCOEF_X,0
EK3_DRAG_BCOEF_Y,0
EK3_DRAG_M_NSE,0.5
EK3_DRAG_MCOEF,0
EK3_EAS_I_GATE,400
EK3_EAS_M_NSE,1.4
EK3_ENABLE,1
EK3_ERR_THRESH,0.2
EK3_FLOW_DELAY,10
EK3_FLOW_I_GATE,300
EK3_FLOW_M_NSE,0.25
EK3_FLOW_USE,2
EK3_GBIAS_P_NSE,0.001
EK3_GLITCH_RAD,25
EK3_GND_EFF_DZ,4
EK3_GPS_CHECK,0
EK3_GPS_VACC_MAX,0
EK3_GSF_RST_MAX,2
EK3_GSF_RUN_MASK,3
EK3_GSF_USE_MASK,3
EK3_GYRO_P_NSE,0.015
EK3_HGT_DELAY,60
EK3_HGT_I_GATE,500
EK3_HRT_FILT,2
EK3_IMU_MASK,3
EK3_LOG_LEVEL,0
EK3_MAG_CAL,3
EK3_MAG_EF_LIM,50
EK3_MAG_I_GATE,300
EK3_MAG_M_NSE,0.05
EK3_MAG_MASK,0
EK3_MAGB_P_NSE,0.0001
EK3_MAGE_P_NSE,0.001
EK3_MAX_FLOW,2.5
EK3_NOAID_M_NSE,10
EK3_OGN_HGT_MASK,0
EK3_OGNM_TEST_SF,2
EK3_POS_I_GATE,500
EK3_POSNE_M_NSE,0.5
EK3_PRIMARY,0
EK3_RNG_I_GATE,500
EK3_RNG_M_NSE,0.5
EK3_RNG_USE_HGT,-1
EK3_RNG_USE_SPD,2
EK3_SRC_OPTIONS,1
EK3_SRC1_POSXY,0
EK3_SRC1_POSZ,2
EK3_SRC1_VELXY,5
EK3_SRC1_VELZ,0
EK3_SRC1_YAW,1
EK3_SRC2_POSXY,0
EK3_SRC2_POSZ,2
EK3_SRC2_VELXY,5
EK3_SRC2_VELZ,0
EK3_SRC2_YAW,1
EK3_SRC3_POSXY,0
EK3_SRC3_POSZ,1
EK3_SRC3_VELXY,5
EK3_SRC3_VELZ,0
EK3_SRC3_YAW,1
EK3_TAU_OUTPUT,25
EK3_TERR_GRAD,0.1
EK3_VEL_I_GATE,500
EK3_VELD_M_NSE,0.5
EK3_VELNE_M_NSE,0.3
EK3_VIS_VERR_MAX,0.9
EK3_VIS_VERR_MIN,0.1
EK3_WENC_VERR,0.1
EK3_WIND_P_NSE,0.2
EK3_WIND_PSCALE,1
EK3_YAW_I_GATE,300
EK3_YAW_M_NSE,0.5
ESC_CALIBRATION,0
ESC_TLM_MAV_OFS,0
FENCE_ACTION,0
FENCE_ALT_MAX,100
FENCE_ALT_MIN,-10
FENCE_ENABLE,0
FENCE_MARGIN,2
FENCE_RADIUS,300
FENCE_TOTAL,0
FENCE_TYPE,7
FFT_ENABLE,0
FHLD_BRAKE_RATE,8
FHLD_FILT_HZ,5
FHLD_FLOW_MAX,0.6
FHLD_QUAL_MIN,10
FHLD_XY_FILT_HZ,5
FHLD_XY_I,0.3
FHLD_XY_IMAX,3000
FHLD_XY_P,0.2
FILT1_TYPE,0
FILT2_TYPE,0
FILT3_TYPE,0
FILT4_TYPE,0
FILT5_TYPE,0
FILT6_TYPE,0
FILT7_TYPE,0
FILT8_TYPE,0
FLIGHT_OPTIONS,0
FLOW_ADDR,0
FLOW_FXSCALER,0
FLOW_FYSCALER,0
FLOW_ORIENT_YAW,0
FLOW_POS_X,0.01
FLOW_POS_Y,0
FLOW_POS_Z,0.1
FLOW_TYPE,1
FLTMODE_CH,5
FLTMODE_GCSBLOCK,0
FLTMODE1,5
FLTMODE2,5
FLTMODE3,5
FLTMODE4,2
FLTMODE5,2
FLTMODE6,2
FOLL_ENABLE,0
FORMAT_VERSION,120
FRAME_CLASS,1
FRAME_TYPE,1
FRSKY_DNLINK_ID,27
FRSKY_DNLINK1_ID,20
FRSKY_DNLINK2_ID,7
FRSKY_OPTIONS,0
FRSKY_UPLINK_ID,13
FS_CRASH_CHECK,1
FS_DR_ENABLE,2
FS_DR_TIMEOUT,30
FS_EKF_ACTION,1
FS_EKF_FILT,5
FS_EKF_THRESH,0.8
FS_GCS_ENABLE,0
FS_GCS_TIMEOUT,5
FS_OPTIONS,16
FS_THR_ENABLE,1
FS_THR_VALUE,975
FS_VIBE_ENABLE,1
GCS_PID_MASK,0
GEN_TYPE,0
GND_EFFECT_COMP,1
GPS_AUTO_CONFIG,1
GPS_AUTO_SWITCH,1
GPS_BLEND_MASK,5
GPS_CAN_NODEID1,0
GPS_CAN_NODEID2,0
GPS_COM_PORT,1
GPS_COM_PORT2,1
GPS_DELAY_MS,0
GPS_DELAY_MS2,0
GPS_DRV_OPTIONS,0
GPS_GNSS_MODE,0
GPS_GNSS_MODE2,0
GPS_HDOP_GOOD,140
GPS_INJECT_TO,127
GPS_MB1_TYPE,0
GPS_MB2_TYPE,0
GPS_MIN_DGPS,100
GPS_MIN_ELEV,-100
GPS_NAVFILTER,8
GPS_POS1_X,0
GPS_POS1_Y,0
GPS_POS1_Z,0
GPS_POS2_X,0
GPS_POS2_Y,0
GPS_POS2_Z,0
GPS_PRIMARY,0
GPS_RATE_MS,200
GPS_RATE_MS2,200
GPS_RAW_DATA,0
GPS_SAVE_CFG,2
GPS_SBAS_MODE,2
GPS_SBP_LOGMASK,-256
GPS_TYPE,0
GPS_TYPE2,0
GPS1_CAN_OVRIDE,0
GPS2_CAN_OVRIDE,0
GRIP_ENABLE,0
GUID_OPTIONS,0
GUID_TIMEOUT,3
INITIAL_MODE,5
INS_ACC_BODYFIX,2
INS_ACC_ID,2621706
INS_ACC1_CALTEMP,43.34951
INS_ACC2_CALTEMP,39.49276
INS_ACC2_ID,3408418
INS_ACC2OFFS_X,-0.0248805
INS_ACC2OFFS_Y,-0.0140058
INS_ACC2OFFS_Z,-0.0811037
INS_ACC2SCAL_X,0.9988645
INS_ACC2SCAL_Y,0.9963637
INS_ACC2SCAL_Z,0.9983686
INS_ACC3_CALTEMP,39.36872
INS_ACC3_ID,2622002
INS_ACC3OFFS_X,0.0163115
INS_ACC3OFFS_Y,0.1361505
INS_ACC3OFFS_Z,-0.020974
INS_ACC3SCAL_X,0.9978383
INS_ACC3SCAL_Y,0.9982998
INS_ACC3SCAL_Z,0.9901538
INS_ACCEL_FILTER,10
INS_ACCOFFS_X,-0.0436787
INS_ACCOFFS_Y,0.1670457
INS_ACCOFFS_Z,-0.1062231
INS_ACCSCAL_X,0.9984105
INS_ACCSCAL_Y,0.9983184
INS_ACCSCAL_Z,0.9891064
INS_ENABLE_MASK,127
INS_FAST_SAMPLE,7
INS_GYR_CAL,1
INS_GYR_ID,2621706
INS_GYR1_CALTEMP,20.23407
INS_GYR2_CALTEMP,36.5942
INS_GYR2_ID,3408418
INS_GYR2OFFS_X,-0.0078317
INS_GYR2OFFS_Y,0.0137467
INS_GYR2OFFS_Z,0.0051271
INS_GYR3_CALTEMP,37.89447
INS_GYR3_ID,2622002
INS_GYR3OFFS_X,0.0193089
INS_GYR3OFFS_Y,-0.0207484
INS_GYR3OFFS_Z,0.0008624
INS_GYRO_FILTER,42
INS_GYRO_RATE,1
INS_GYROFFS_X,0.0074806
INS_GYROFFS_Y,0.0090727
INS_GYROFFS_Z,-0.00774
INS_HNTC2_ENABLE,0
INS_HNTCH_ENABLE,0
INS_LOG_BAT_CNT,1024
INS_LOG_BAT_LGCT,32
INS_LOG_BAT_LGIN,20
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
INS_POS1_X,0
INS_POS1_Y,0
INS_POS1_Z,0
INS_POS2_X,0
INS_POS2_Y,0
INS_POS2_Z,0
INS_POS3_X,0
INS_POS3_Y,0
INS_POS3_Z,0
INS_RAW_LOG_OPT,0
INS_STILL_THRESH,2.5
INS_TCAL_OPTIONS,0
INS_TCAL1_ENABLE,0
INS_TCAL2_ENABLE,0
INS_TCAL3_ENABLE,0
INS_TRIM_OPTION,1
INS_USE,1
INS_USE2,1
INS_USE3,1
KDE_NPOLE,14
LAND_ALT_LOW,1000
LAND_REPOSITION,1
LAND_SPEED,50
LAND_SPEED_HIGH,0
LGR_ENABLE,0
LOG_BACKEND_TYPE,1
LOG_BITMASK,176126
LOG_DARM_RATEMAX,0
LOG_DISARMED,1
LOG_FILE_BUFSIZE,200
LOG_FILE_DSRMROT,0
LOG_FILE_MB_FREE,500
LOG_FILE_RATEMAX,0
LOG_FILE_TIMEOUT,5
LOG_MAV_BUFSIZE,8
LOG_MAV_RATEMAX,0
LOG_MAX_FILES,500
LOG_REPLAY,0
LOIT_ACC_MAX,500
LOIT_ANG_MAX,0
LOIT_BRK_ACCEL,250
LOIT_BRK_DELAY,1
LOIT_BRK_JERK,500
LOIT_SPEED,1250
MIS_OPTIONS,0
MIS_RESTART,0
MIS_TOTAL,0
MNT1_TYPE,0
MNT2_TYPE,0
MOT_BAT_CURR_MAX,0
MOT_BAT_CURR_TC,5
MOT_BAT_IDX,0
MOT_BAT_VOLT_MAX,25.2
MOT_BAT_VOLT_MIN,20.4
MOT_BOOST_SCALE,0
MOT_HOVER_LEARN,2
MOT_OPTIONS,0
MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
MOT_PWM_TYPE,0
MOT_SAFE_DISARM,0
MOT_SAFE_TIME,1
MOT_SLEW_DN_TIME,0
MOT_SLEW_UP_TIME,0
MOT_SPIN_ARM,0.1
MOT_SPIN_MAX,0.95
MOT_SPIN_MIN,0.15
MOT_SPOOL_TIM_DN,0
MOT_SPOOL_TIME,0.5
MOT_THST_EXPO,0.6
MOT_THST_HOVER,0.2
MOT_YAW_HEADROOM,200
MSP_OPTIONS,0
MSP_OSD_NCELLS,0
NMEA_MSG_EN,3
NMEA_RATE_MS,100
NTF_BUZZ_ON_LVL,1
NTF_BUZZ_PIN,-1
NTF_BUZZ_TYPES,5
NTF_BUZZ_VOLUME,100
NTF_DISPLAY_TYPE,0
NTF_LED_BRIGHT,3
NTF_LED_LEN,1
NTF_LED_OVERRIDE,0
NTF_LED_TYPES,231
OA_TYPE,0
OSD_TYPE,0
PHLD_BRAKE_ANGLE,3000
PHLD_BRAKE_RATE,8
PILOT_ACCEL_Z,250
PILOT_SPEED_DN,0
PILOT_SPEED_UP,250
PILOT_THR_BHV,0
PILOT_THR_FILT,0
PILOT_TKOFF_ALT,0
PILOT_Y_EXPO,0
PILOT_Y_RATE,202.5
PILOT_Y_RATE_TC,0
PLDP_DELAY,0
PLDP_RNG_MIN,0
PLDP_SPEED_DN,0
PLDP_THRESH,0.9
PLND_ENABLED,0
PRX_ALT_MIN,1
PRX_FILT,0.25
PRX_IGN_GND,0
PRX_LOG_RAW,0
PRX1_TYPE,0
PRX2_TYPE,0
PRX3_TYPE,0
PSC_ACCZ_D,0
PSC_ACCZ_D_FF,0
PSC_ACCZ_FF,0
PSC_ACCZ_FLTD,0
PSC_ACCZ_FLTE,20
PSC_ACCZ_FLTT,0
PSC_ACCZ_I,1
PSC_ACCZ_IMAX,800
PSC_ACCZ_NEF,0
PSC_ACCZ_NTF,0
PSC_ACCZ_P,0.5
PSC_ACCZ_PDMX,0
PSC_ACCZ_SMAX,0
PSC_ANGLE_MAX,0
PSC_JERK_XY,5
PSC_JERK_Z,5
PSC_POSXY_P,1
PSC_POSZ_P,1
PSC_VELXY_D,0.5
PSC_VELXY_FF,0
PSC_VELXY_FLTD,5
PSC_VELXY_FLTE,5
PSC_VELXY_I,1
PSC_VELXY_IMAX,1000
PSC_VELXY_P,2
PSC_VELZ_D,0
PSC_VELZ_FF,0
PSC_VELZ_FLTD,5
PSC_VELZ_FLTE,5
PSC_VELZ_I,0
PSC_VELZ_IMAX,1000
PSC_VELZ_P,5
RALLY_INCL_HOME,1
RALLY_LIMIT_KM,0.3
RALLY_TOTAL,0
RC_FS_TIMEOUT,1
RC_OPTIONS,32
RC_OVERRIDE_TIME,3
RC_PROTOCOLS,1
RC_SPEED,490
RC1_DZ,20
RC1_MAX,1900
RC1_MIN,1100
RC1_OPTION,0
RC1_REVERSED,0
RC1_TRIM,1500
RC10_DZ,0
RC10_MAX,1900
RC10_MIN,1100
RC10_OPTION,0
RC10_REVERSED,0
RC10_TRIM,1500
RC11_DZ,0
RC11_MAX,1900
RC11_MIN,1100
RC11_OPTION,0
RC11_REVERSED,0
RC11_TRIM,1500
RC12_DZ,0
RC12_MAX,1900
RC12_MIN,1100
RC12_OPTION,0
RC12_REVERSED,0
RC12_TRIM,1500
RC13_DZ,0
RC13_MAX,1900
RC13_MIN,1100
RC13_OPTION,0
RC13_REVERSED,0
RC13_TRIM,1500
RC14_DZ,0
RC14_MAX,1900
RC14_MIN,1100
RC14_OPTION,0
RC14_REVERSED,0
RC14_TRIM,1500
RC15_DZ,0
RC15_MAX,1900
RC15_MIN,1100
RC15_OPTION,0
RC15_REVERSED,0
RC15_TRIM,1500
RC16_DZ,0
RC16_MAX,1900
RC16_MIN,1100
RC16_OPTION,0
RC16_REVERSED,0
RC16_TRIM,1500
RC2_DZ,20
RC2_MAX,1900
RC2_MIN,1100
RC2_OPTION,0
RC2_REVERSED,0
RC2_TRIM,1500
RC3_DZ,30
RC3_MAX,1900
RC3_MIN,1100
RC3_OPTION,0
RC3_REVERSED,0
RC3_TRIM,1500
RC4_DZ,20
RC4_MAX,1900
RC4_MIN,1100
RC4_OPTION,0
RC4_REVERSED,0
RC4_TRIM,1500
RC5_DZ,0
RC5_MAX,1900
RC5_MIN,1100
RC5_OPTION,0
RC5_REVERSED,0
RC5_TRIM,1500
RC6_DZ,0
RC6_MAX,1900
RC6_MIN,1100
RC6_OPTION,31
RC6_REVERSED,0
RC6_TRIM,1500
RC7_DZ,0
RC7_MAX,1900
RC7_MIN,1100
RC7_OPTION,0
RC7_REVERSED,0
RC7_TRIM,1500
RC8_DZ,0
RC8_MAX,1900
RC8_MIN,1100
RC8_OPTION,0
RC8_REVERSED,0
RC8_TRIM,1500
RC9_DZ,0
RC9_MAX,1900
RC9_MIN,1100
RC9_OPTION,0
RC9_REVERSED,0
RC9_TRIM,1500
RCMAP_PITCH,2
RCMAP_ROLL,1
RCMAP_THROTTLE,3
RCMAP_YAW,4
RELAY1_FUNCTION,0
RELAY2_FUNCTION,0
RELAY3_FUNCTION,0
RELAY4_FUNCTION,0
RELAY5_FUNCTION,0
RELAY6_FUNCTION,0
RNGFND_FILT,0.5
RNGFND1_TYPE,0
RNGFND2_TYPE,0
RNGFND3_TYPE,0
RNGFND4_TYPE,0
RNGFND5_TYPE,0
RNGFND6_TYPE,0
RNGFND7_TYPE,0
RNGFND8_TYPE,0
RNGFND9_TYPE,0
RNGFNDA_ADDR,0
RNGFNDA_FUNCTION,0
RNGFNDA_GNDCLEAR,10
RNGFNDA_MAX_CM,1000
RNGFNDA_MIN_CM,10
RNGFNDA_OFFSET,0
RNGFNDA_ORIENT,25
RNGFNDA_PIN,-1
RNGFNDA_POS_X,0
RNGFNDA_POS_Y,0
RNGFNDA_POS_Z,0
RNGFNDA_PWRRNG,0
RNGFNDA_RMETRIC,1
RNGFNDA_SCALING,3
RNGFNDA_STOP_PIN,-1
RNGFNDA_TYPE,20
RPM1_TYPE,0
RPM2_TYPE,0
RSSI_TYPE,0
RTL_ALT,1500
RTL_ALT_FINAL,0
RTL_ALT_TYPE,0
RTL_CLIMB_MIN,0
RTL_CONE_SLOPE,3
RTL_LOIT_TIME,5000
RTL_OPTIONS,0
RTL_SPEED,0
SCHED_DEBUG,0
SCHED_LOOP_RATE,400
SCHED_OPTIONS,0
SCR_ENABLE,0
SERIAL_PASS1,0
SERIAL_PASS2,-1
SERIAL_PASSTIMO,15
SERIAL0_BAUD,115
SERIAL0_PROTOCOL,2
SERIAL1_BAUD,921
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,2
SERIAL2_BAUD,57
SERIAL2_OPTIONS,0
SERIAL2_PROTOCOL,2
SERIAL3_BAUD,230
SERIAL3_OPTIONS,0
SERIAL3_PROTOCOL,5
SERIAL4_BAUD,115
SERIAL4_OPTIONS,0
SERIAL4_PROTOCOL,9
SERIAL5_BAUD,57
SERIAL5_OPTIONS,0
SERIAL5_PROTOCOL,-1
SERIAL6_BAUD,57
SERIAL6_OPTIONS,0
SERIAL6_PROTOCOL,-1
SERIAL7_BAUD,57
SERIAL7_OPTIONS,0
SERIAL7_PROTOCOL,-1
SERIAL8_BAUD,115200
SERIAL8_OPTIONS,0
SERIAL8_PROTOCOL,2
SERVO_32_ENABLE,0
SERVO_BLH_3DMASK,0
SERVO_BLH_AUTO,0
SERVO_BLH_DEBUG,0
SERVO_BLH_MASK,0
SERVO_BLH_OTYPE,0
SERVO_BLH_POLES,14
SERVO_BLH_PORT,0
SERVO_BLH_RVMASK,0
SERVO_BLH_TEST,0
SERVO_BLH_TMOUT,0
SERVO_BLH_TRATE,10
SERVO_DSHOT_ESC,0
SERVO_DSHOT_RATE,0
SERVO_FTW_MASK,0
SERVO_FTW_POLES,14
SERVO_FTW_RVMASK,0
SERVO_GPIO_MASK,0
SERVO_RATE,50
SERVO_RC_FS_MSK,0
SERVO_ROB_POSMAX,4095
SERVO_ROB_POSMIN,0
SERVO_SBUS_RATE,50
SERVO_VOLZ_MASK,0
SERVO1_FUNCTION,33
SERVO1_MAX,1900
SERVO1_MIN,1100
SERVO1_REVERSED,0
SERVO1_TRIM,1500
SERVO10_FUNCTION,0
SERVO10_MAX,1900
SERVO10_MIN,1100
SERVO10_REVERSED,0
SERVO10_TRIM,1500
SERVO11_FUNCTION,0
SERVO11_MAX,1900
SERVO11_MIN,1100
SERVO11_REVERSED,0
SERVO11_TRIM,1500
SERVO12_FUNCTION,0
SERVO12_MAX,1900
SERVO12_MIN,1100
SERVO12_REVERSED,0
SERVO12_TRIM,1500
SERVO13_FUNCTION,0
SERVO13_MAX,1900
SERVO13_MIN,1100
SERVO13_REVERSED,0
SERVO13_TRIM,1500
SERVO14_FUNCTION,0
SERVO14_MAX,1900
SERVO14_MIN,1100
SERVO14_REVERSED,0
SERVO14_TRIM,1500
SERVO15_FUNCTION,0
SERVO15_MAX,1900
SERVO15_MIN,1100
SERVO15_REVERSED,0
SERVO15_TRIM,1500
SERVO16_FUNCTION,0
SERVO16_MAX,1900
SERVO16_MIN,1100
SERVO16_REVERSED,0
SERVO16_TRIM,1500
SERVO2_FUNCTION,34
SERVO2_MAX,1900
SERVO2_MIN,1100
SERVO2_REVERSED,0
SERVO2_TRIM,1500
SERVO3_FUNCTION,35
SERVO3_MAX,1900
SERVO3_MIN,1100
SERVO3_REVERSED,0
SERVO3_TRIM,1500
SERVO4_FUNCTION,36
SERVO4_MAX,1900
SERVO4_MIN,1100
SERVO4_REVERSED,0
SERVO4_TRIM,1500
SERVO5_FUNCTION,0
SERVO5_MAX,1900
SERVO5_MIN,1100
SERVO5_REVERSED,0
SERVO5_TRIM,1500
SERVO6_FUNCTION,0
SERVO6_MAX,1900
SERVO6_MIN,1100
SERVO6_REVERSED,0
SERVO6_TRIM,1500
SERVO7_FUNCTION,0
SERVO7_MAX,1900
SERVO7_MIN,1100
SERVO7_REVERSED,0
SERVO7_TRIM,1500
SERVO8_FUNCTION,0
SERVO8_MAX,1900
SERVO8_MIN,1100
SERVO8_REVERSED,0
SERVO8_TRIM,1500
SERVO9_FUNCTION,0
SERVO9_MAX,1900
SERVO9_MIN,1100
SERVO9_REVERSED,0
SERVO9_TRIM,1500
SID_AXIS,0
SIMPLE,0
SPRAY_ENABLE,0
SR0_ADSB,0
SR0_EXT_STAT,0
SR0_EXTRA1,0
SR0_EXTRA2,0
SR0_EXTRA3,0
SR0_PARAMS,0
SR0_POSITION,0
SR0_RAW_CTRL,0
SR0_RAW_SENS,0
SR0_RC_CHAN,0
SR1_ADSB,0
SR1_EXT_STAT,0
SR1_EXTRA1,0
SR1_EXTRA2,0
SR1_EXTRA3,0
SR1_PARAMS,0
SR1_POSITION,0
SR1_RAW_CTRL,0
SR1_RAW_SENS,0
SR1_RC_CHAN,0
SR2_ADSB,0
SR2_EXT_STAT,0
SR2_EXTRA1,0
SR2_EXTRA2,0
SR2_EXTRA3,0
SR2_PARAMS,0
SR2_POSITION,0
SR2_RAW_CTRL,0
SR2_RAW_SENS,0
SR2_RC_CHAN,0
SR3_ADSB,0
SR3_EXT_STAT,0
SR3_EXTRA1,0
SR3_EXTRA2,0
SR3_EXTRA3,0
SR3_PARAMS,0
SR3_POSITION,0
SR3_RAW_CTRL,0
SR3_RAW_SENS,0
SR3_RC_CHAN,0
SR4_ADSB,0
SR4_EXT_STAT,0
SR4_EXTRA1,0
SR4_EXTRA2,0
SR4_EXTRA3,0
SR4_PARAMS,0
SR4_POSITION,0
SR4_RAW_CTRL,0
SR4_RAW_SENS,0
SR4_RC_CHAN,0
SRTL_ACCURACY,2
SRTL_OPTIONS,0
SRTL_POINTS,300
STAT_BOOTCNT,19
STAT_FLTTIME,0
STAT_RESET,1
STAT_RUNTIME,12217
SUPER_SIMPLE,0
SURFTRAK_MODE,1
SURFTRAK_TC,1
SYSID_ENFORCE,0
SYSID_MYGCS,255
SYSID_THISMAV,1
TCAL_ENABLED,0
TELEM_DELAY,0
TERRAIN_ENABLE,1
TERRAIN_MARGIN,0.05
TERRAIN_OFS_MAX,30
TERRAIN_OPTIONS,0
TERRAIN_SPACING,100
THR_DZ,100
THROW_ALT_MAX,0
THROW_ALT_MIN,0
THROW_MOT_START,0
THROW_NEXTMODE,18
THROW_TYPE,0
TKOFF_RPM_MAX,0
TKOFF_RPM_MIN,0
TKOFF_SLEW_TIME,2
TKOFF_THR_MAX,0.9
TUNE,0
TUNE_MAX,0
TUNE_MIN,0
VISO_TYPE,0
VTX_ENABLE,0
WINCH_TYPE,0
WP_NAVALT_MIN,0
WP_YAW_BEHAVIOR,2
WPNAV_ACCEL,250
WPNAV_ACCEL_C,0
WPNAV_ACCEL_Z,100
WPNAV_JERK,1
WPNAV_RADIUS,200
WPNAV_RFND_USE,1
WPNAV_SPEED,1000
WPNAV_SPEED_DN,150
WPNAV_SPEED_UP,250
WPNAV_TER_MARGIN,10
WVANE_ENABLE,0
ZIGZ_AUTO_ENABLE,0