Hello everybody ,
I don’t know if this is the right place , i’d like to share my idea and to know if have some chance of success or viceversa i’m wasting my time
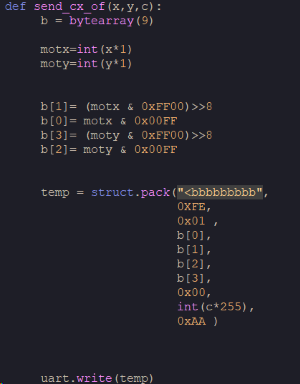
I have an OpenMV Cam and recently i modified the script called “mavlink_opticalFlow.py” to send the information in the same way as Cheerson CX-OF serial protocol
I followed the instruction to use the CX-OF sensor
http://ardupilot.org/copter/docs/common-cheerson-cxof.html
I forced to use uart in SITL

And I received the data from OpenMVCam
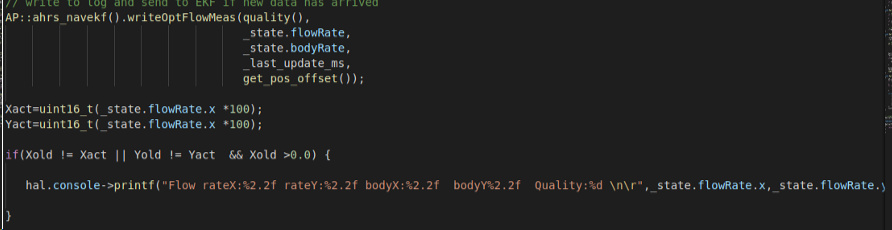
Something like this…

First question:
How is calculated the CXOF_PIXEL_SCALING ?
It’s possible to use the FLOW_F…SCALER instead of CXOF_PIXEL_SCALING ?
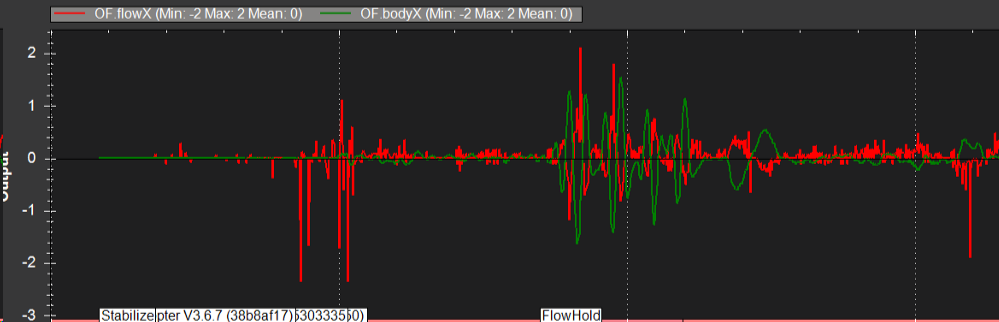
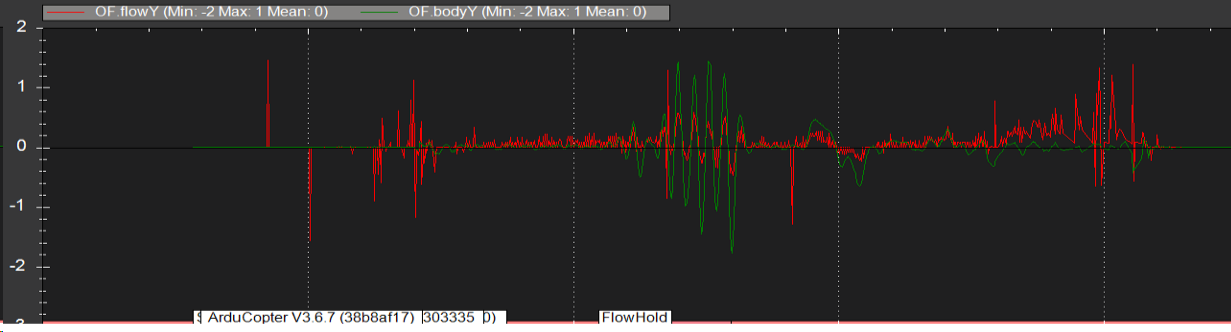
As result of first real test with my quadcopter I logged these data. The copter was in oscillation in roll and pitch axis. FlowX vs BodyX is uncorrelated but viceversa FlowY vs BodyY is correlated
Could be only a problem of orientation ?
The data from flow sensor are not linear ( i didn’t set EK2_FLOW_DELAY ) or scale problem ?
Any comments will be appreciated
Thank