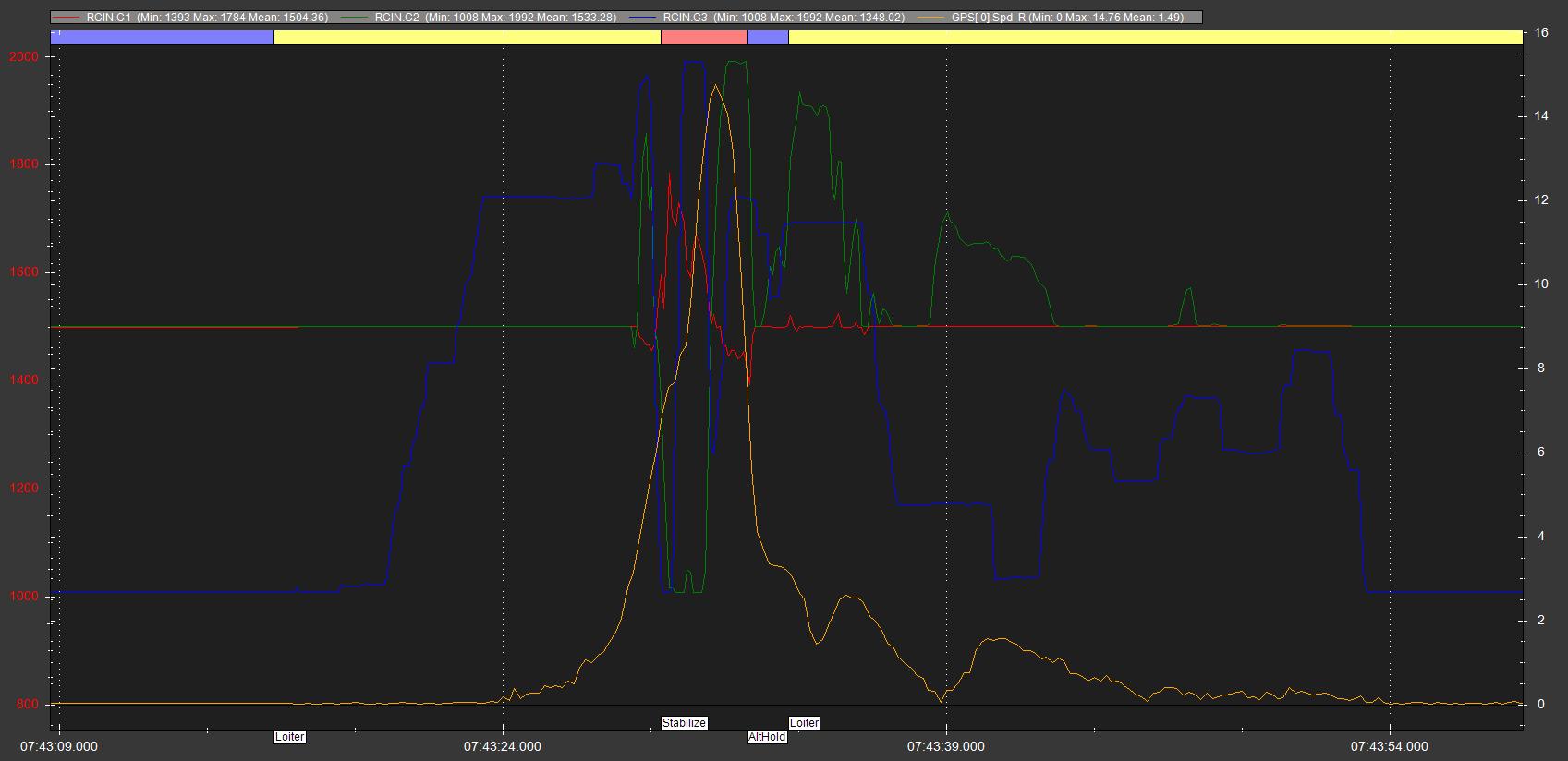
The GPS speed instantly going to 14m/sec is not good, and signs of poor GPS position or interference.
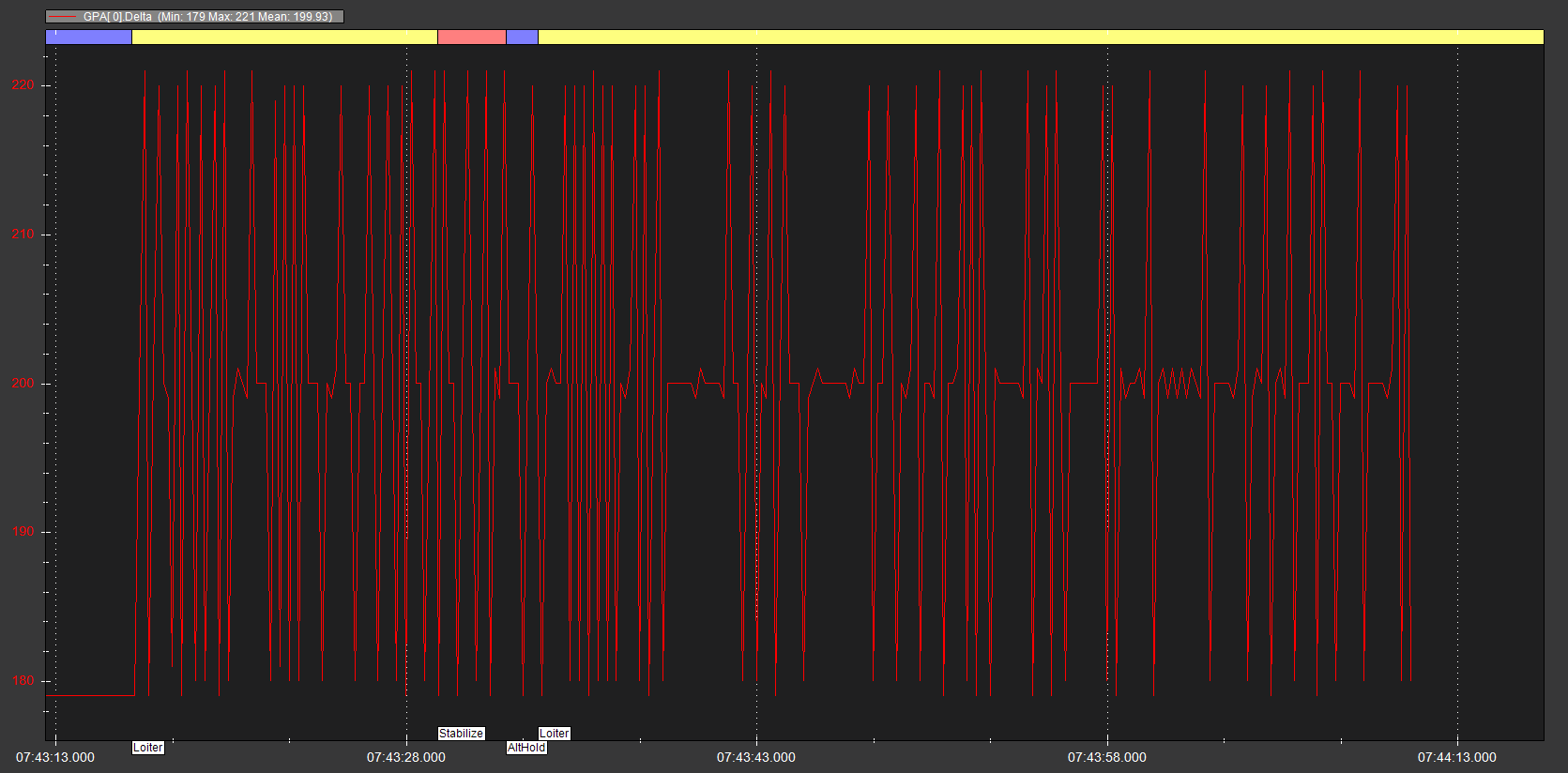
And the GPS update rate is way less than ideal
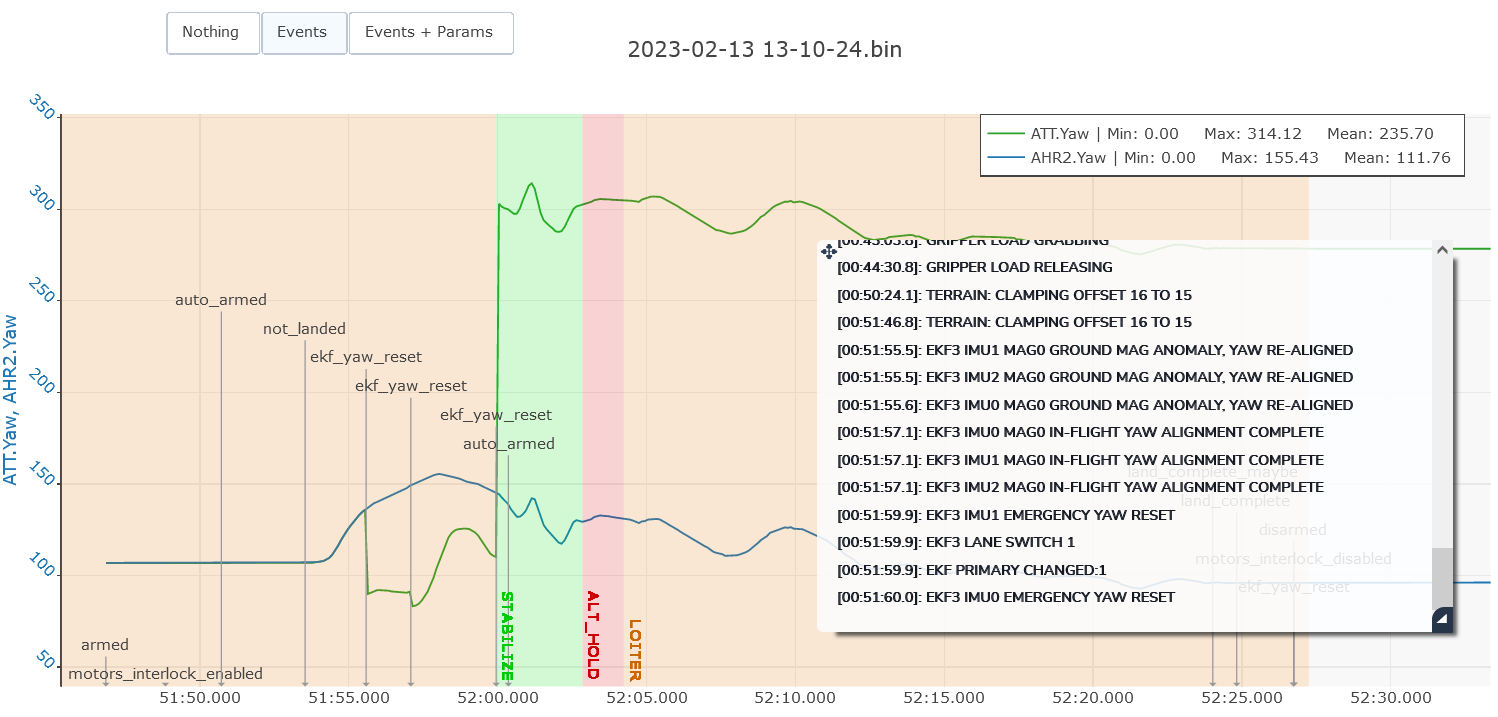
There’s a lot of things going on with position controller, RC inputs and vibrations. I suspect it’s all because of being in Loiter mode and having a wandering GPS position causing the copter to move laterally. It looks like the RC inputs and vibrations are effects of the sudden movement, then you switch to Stabilise to save the copter.
If you look on the map of that log there is total lack of any GPS track, at least no where near the IMU track.
Related to this problem I would set these:
- BRD_BOOT_DELAY,3000 to allow the CAN GPS to boot before the flight controller
- FENCE_ENABLE,1 wont allow you to arm until Home can be set
- GPS_GNSS_MODE,7 to limit the number of constellations
and check if there’s a firmware update for the CAN GPS unit
Priority should be to update to latest stable firmware too, 4.3.3 at this point in time. There is important fixes for Cube Orange, and plenty more of course.
In relation to other parameters I see that you SHOULD set:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
and these will help
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.16
INS_HNTCH_FREQ,30
INS_HNTCH_BW,15
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222 ← no need to log raw IMU
Do you have T-Motor Flame or Alpha ESCs?
This is the PWM range for them
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
There might also be some experimentation or testing related to setting the MOT_THST_EXPO correctly, and also recheck the MOT_SPIN_ARM and MOT_SPIN_MIN.
If you change any of those, Hover Thrust needs to relearn, so give it some time in AltHold.
If you can get a good valid flight post a link to the .bin log file.
See if you can do some yaw and circle pattens
We (or you) can run that log through MagFit to improve compass settings.
Opinion: anything bigger than a small FPV quad, should use every safety option and setting available to ensure there’s no fly-away or unexpected lateral movements. And you dont want these things disappearing away to Sea of Japan when RTL triggers.
You should see what a large CF prop can do to a solid lump of galvanized steel!