Yes, you should connect it. A GPS glitch is one thing, not having GPS at all is another. You for sure need the external compass that’s in the GPS module. The Pixhawk’s own internal compass is almost always useless and thus disabled. But, don’t worry about that now, just connect it and make the flight after setting those parameters.
Okay sir, will do that tomorrow and update you on the same.
Thanks and Regards.
Okay, so a terrible crash, it hovered for about a minute, half metre high, but then suddenly gained altitude on its own and came banking left towards inside. Good lord it did not fly away somewhere else and crashed in home only. I’m attaching Log file with the video in the Gdrive.
https://drive.google.com/drive/folders/1Gv4Bb8WlMuELfAB41wAF7tMBjxq7MjGl
Regards.
Some progress but that’s a foolish place to fly that craft. Is there not a park nearby?
I see you did set the initial Tune parameters but these were not updated so run it again.
ATC_ACCEL_P_MAX
ATC_ACCEL_R_MAX
ATC_ACCEL_Y_MAX
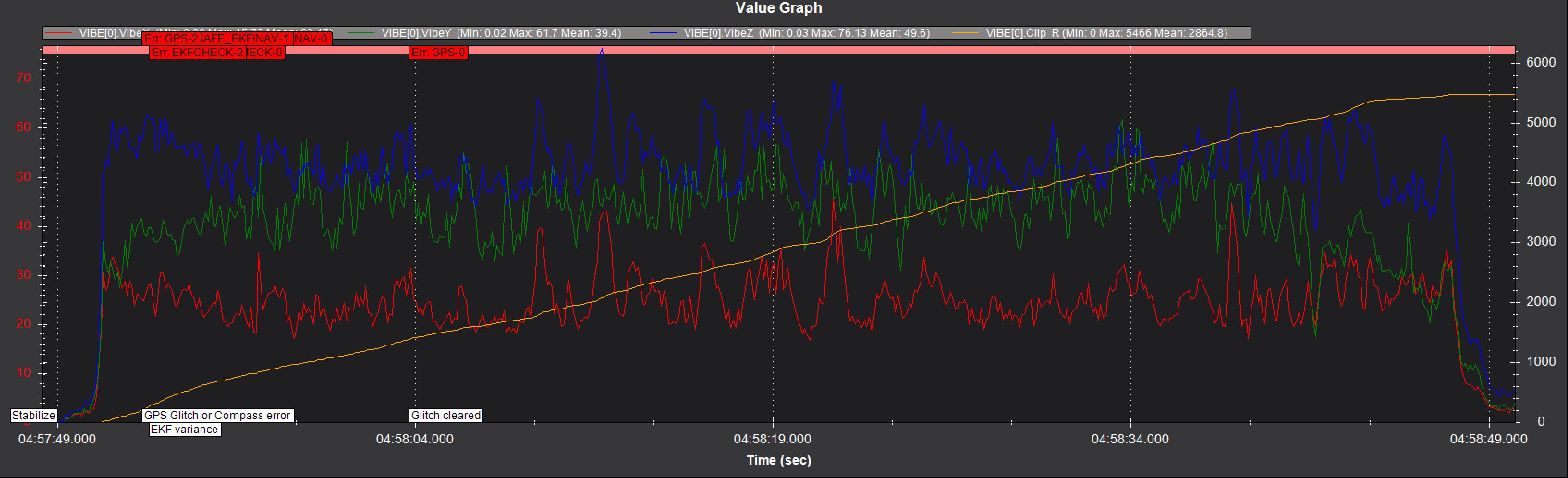
Your main problem is extreme levels of vibration with thousands of clipping events. This is responsible for the uncontrolled ascent.
Those motors with collet adapters are not doing you any good but have you balanced the props?
In any case before you can advance the vibration levels have to be greatly reduced.
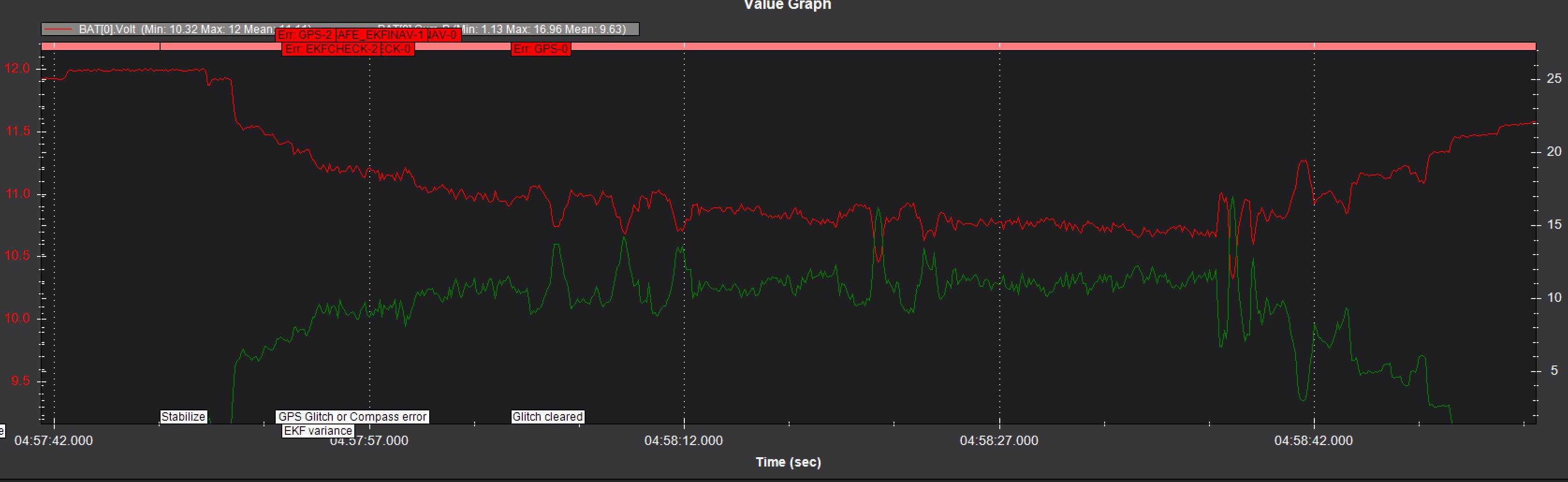
I don’t know where you are getting batteries but they all seem to be shit. Here it’s supplying expected current for that craft at hover but it’s sagging way too much.
This is the kind of thing one can expect when building with these components.
Hardware to avoid
So, The only reason I am avoiding parks dave, as told earlier, is due to the fear of losing the craft on its own, isn’t there a way to have a kill switch sorta thing so that atleast i can save it from flying away? Coz tomorrow, I will be going out with the craft. I have some questions:
- Pixhawk is on top, can i shift it to middle of the frame with the damping pads? It can protect the pixhawk from getting damaged. Also, since now I have atleast a lift off. Does this mean i don’t have a bad pixhawk?
- For Vibration Now I will be ordering 2212-920 kv motors, battery I have for now, so do these motors have soemthing extra that they cause less oscilations? As you mentioned like collet adapters? Cause while putting some throttle one of the motors vibrates so much as if it was a tractor’s engine.
- What did actually cause it to go out of control? There might be some event or instance that the quad ascend on its own and then came ramming down to the left.
Regards
Of course there is. You really need to read the documentation:
Aux functions
- No evidence of a bad Pixhawk.
- Vibrating like a tractors engine and you took off? No comment is needed about that action.
- Acceleration over the full scale of the accelerometers (clipping). Acceleration is a component of sensor fusion for altitude. This is why you can’t advance until the vibe levels are reduced.
I already answered your question about collet adapters. Collet adapters bad, motors with threaded shaft bells good…
Apologies dave, Project completion is nearing so was in rush to provide you the logs. My bad. I will Order the new Motors Right away, these would work right? Or any other sugestion? And what is this CW rotation? I can order 4 of them straight away?
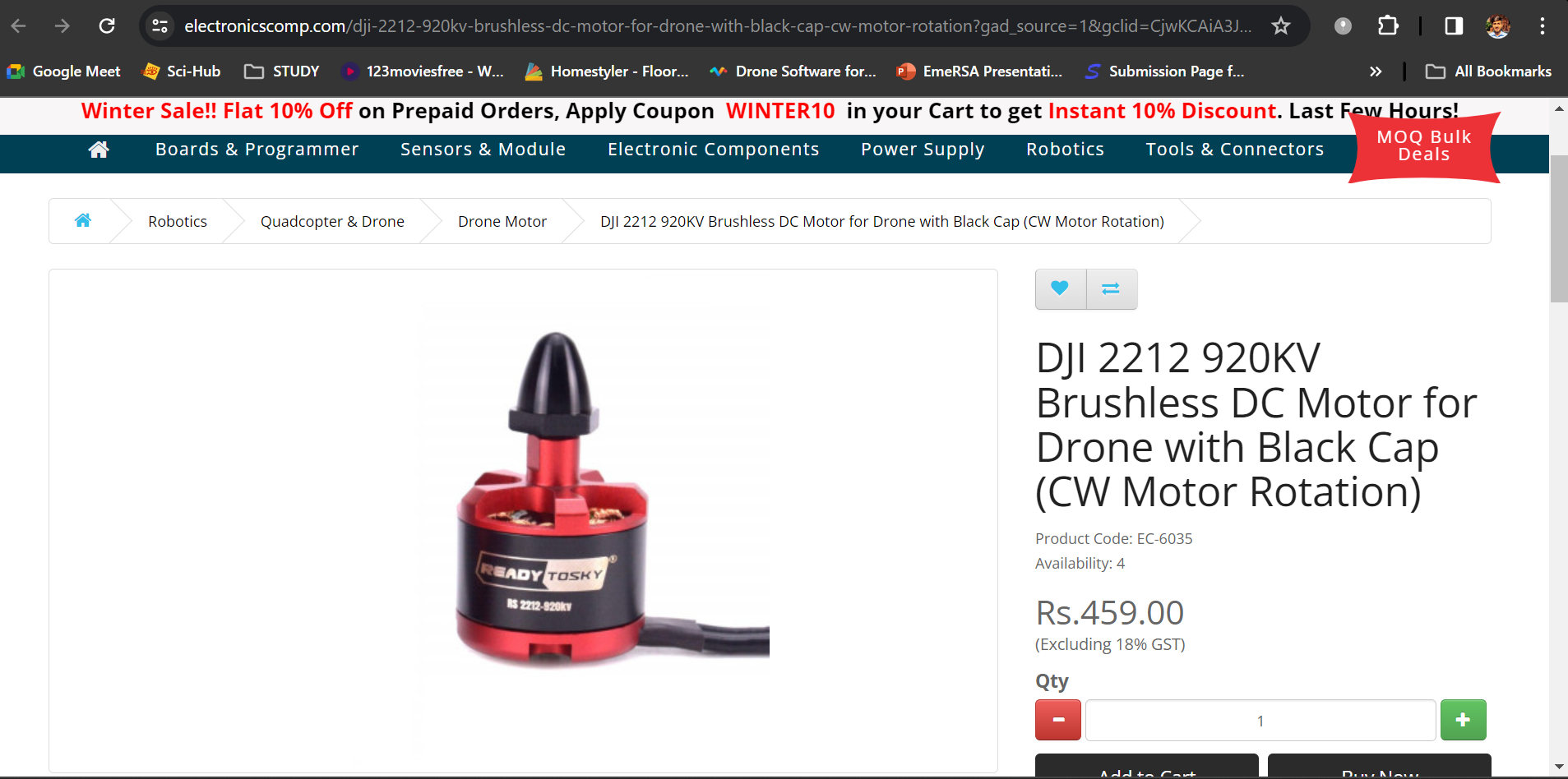
Yes, those are fine for an inexpensive motor. 2 motors have to be CW (clockwise) and 2 motors are CCW (counter clockwise). On these types of motors they have left and right hand threaded shafts so they don’t loosen under load.
So obviously order 2 of each. A set of 4 will usually be this way. A decent set of props would help too. Those cheap plastic ones are terrible.
In those cheap golden motors reversing the polarity will usually make it cw or ccw, it isn’t the case with these ones? Coz I see similar 3 wire config.
Come on dude, think about that. I gave the explanation for why they are labeled as CW and CCW…
Okay dave. Will update you with the new motors on the quad.
Regards
What kind of propellors do you suggest? I have these coming up that are twice the cost of usual plastic props.
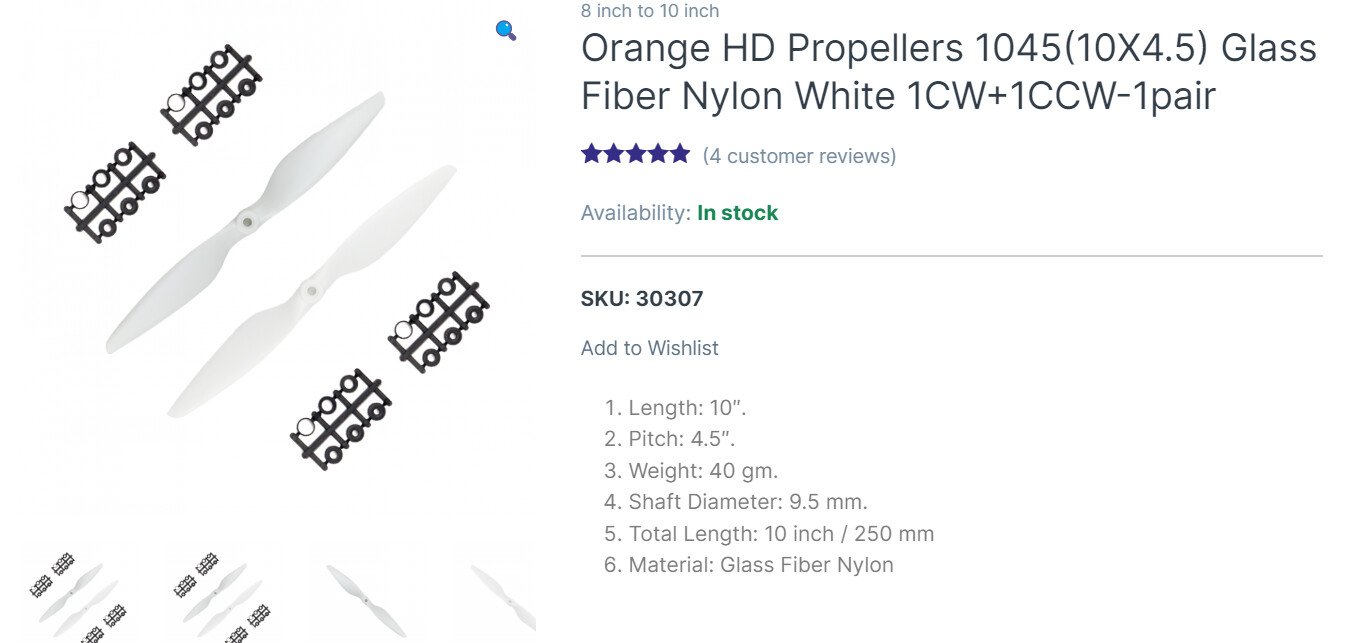
Rest are mostly plastic only, just wanted to confirm Material: Glass Fiber Nylon vs Material: Carbon Nylon.
Also @dkemxr, I was wondering how these people are able to achive this kind of stabilty with all the hardware that matches mine and you have mentioned in hardware to avoid. Is this because of tuning the quad. https://www.youtube.com/watch?v=CRVceIn6xIk&t=6s
Regards
Those are probably both the same and the “carbon” is bullshit or what is coloring it black. I would go with the 1045’s.
I have not seen many, if any, achieve good performance and I have seen these craft on the forum for many years. I had this kind of craft (but not those junk motors) in 2014 and pushed it as far as it would go even with replacement G10 arms. Which just exposed how shitty the frame was. It is not worth spending the money on anything on that list IMO. And if your school is offering this stuff they are doing their students a disservice. Ask your instructors to contact some reputable manufacturers (preferably Ardupilot partner companies) and make the case for donated gear.

If you see, in this video, he is using exact same config as hardware to avoid components still the quad is super stable. Do these Pixhawk’s also matter? Like can his pixhawk be a better chinese clone than mine. Also: He is using a Pencil stand as the GPS mount ![]()
One person’s idea of Stable means nothing.
Good luck with your project.
Also, this is my second battery of this week, battery was completely new and shows 80C, does battery sag happen only when buying shit batteries? I mean is a bad battery only the culprit for the battery sag? What is typical battery graph expected with a good battery? When does it not sag? I can see, battery is dipping to 9.5 volts should that line be mostly straight?
Regards
Did I say something wrong @dkemxr? I think you are saying me goodbye. ![]() I still am a newbie and your insight is what my project needs, not luck. Apologies for anything that might have hurt you, was never my Intent. Was just asking about stabilty of the quad and how it is achieved. I hope you forgive me.
I still am a newbie and your insight is what my project needs, not luck. Apologies for anything that might have hurt you, was never my Intent. Was just asking about stabilty of the quad and how it is achieved. I hope you forgive me.
Regards.
Everything you need to know can be found in these 2 links.
Arducopter Tuning Process
Tuning Blog
@adityapruthi01 we discussed prior that it is first necessary to find the root causes of all your problems. We said don’t buy new things just on a probably idea.
As I unterstood you are not analysed if your FC is not damaged during one of your crashes.
Also you now has the third battery showing problems. But it might be not the battery also it could be a to high power consumption of your system.
A test of the system without props is nearly useless as your motors and so the system has no load.
You can further make your expensive try and error test or you start methodicaly testing.
Okay dave, I’ll check it out.
Thanks