This is one test he performed. And then decided to fly it anyway.
I suppose that motor should be replaced? Along with the other 3 I would contend.
This is one test he performed. And then decided to fly it anyway.
I suppose that motor should be replaced? Along with the other 3 I would contend.
Okay, I will update you by testing the motors and battery voltage drops with the propellors with the quad being stucked to the ground. Is this fine?
Regards
@dkemxr , a point to note, today before flight i replaced that motor, and then took the flight, ofcourse with new golden motor, but maybe the collet adapter was bad so it anyways vibrated. I anyways have ordered the new motors,props and prop balancer suggested by you, They will be here before 9 Feb. Until that I will test the voltage sag and drop with props.
Regards
Yes, Dave, and this test ends up in a heavy crash.
I agree totally with you to use better components like better motors …
All this behaviour is might be a sum of issues and at the moment I can’t recommend any testflight.
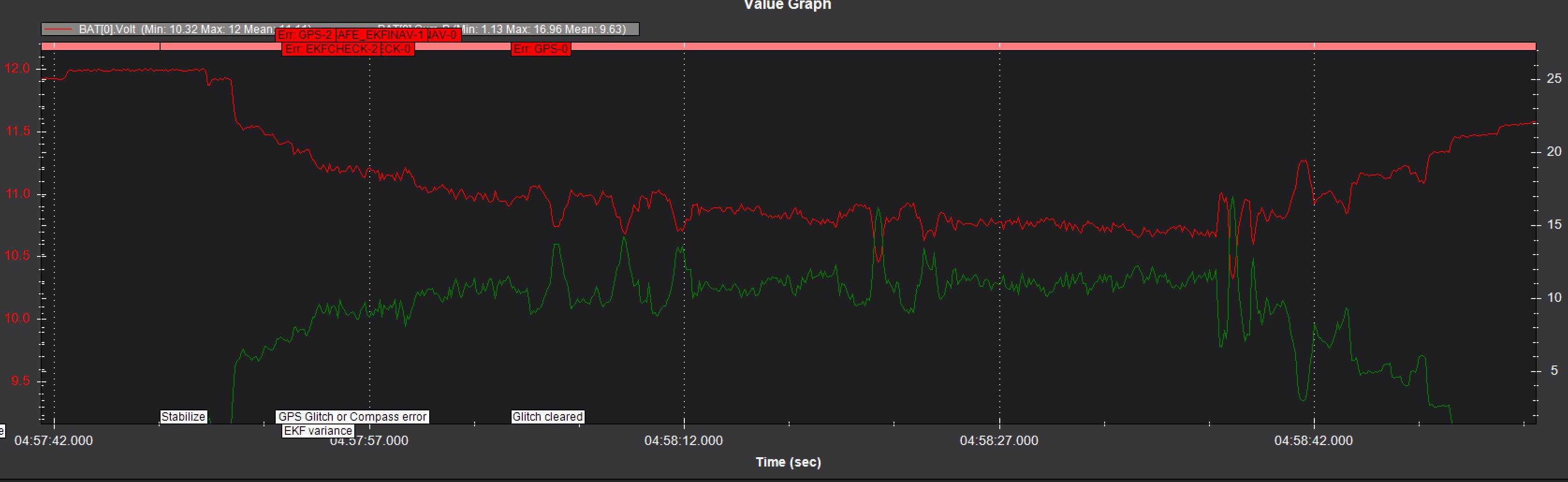
This essentially is that test:
Which battery is this?
Based on the specs you provided it should hover at 9-10A. So it’s close but I would guess your current monitor isn’t calibrated anyway.
This battery is a 2200 mah 3S 11.1 volt, 80C(written, though I doubt it) battery, I just got it yesterday.
But didn’t he @Juergen-Fahlbusch earlier asked to do with the props, and the drone mounted onto the ground?
When I go in Battery monitor tab it shoes “Analog voltage and current”, should i seperatley measure current from a voltmetre and specify in the measured current tab?
Reagrds
No. All you need is a charger that provides mah put back in the battery and it’s simple to calculate a correct amps/volt value from the ratio of mah logged to mah re-charged.
New Amps/volt = (old amps/volt x charger mah) ÷ logged mah
logged mah as in mah that got into the battery after reaching 100% if i’m not wrong?
You have it backwards. Logged you get from here (your flight):
Charged you get from your charger after fully charging the battery used in the flight.
Dave I am not sure to find the cause for a sagging if only calculated a average value. But that is better than nothing ![]()
If we are not sure if monitor is working well I still recommend minimum old school voltmeter and amperemeter measurements.
…
Yes, agree!
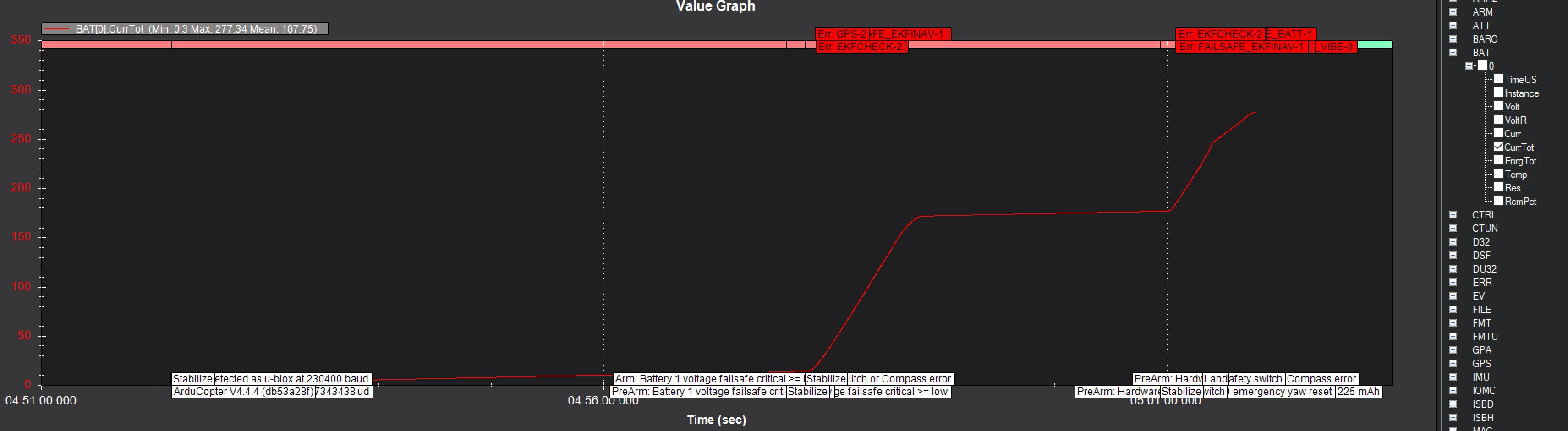
Okay, so i put battery in the quad, do a flight, bring down the battery to let’s say 60%.
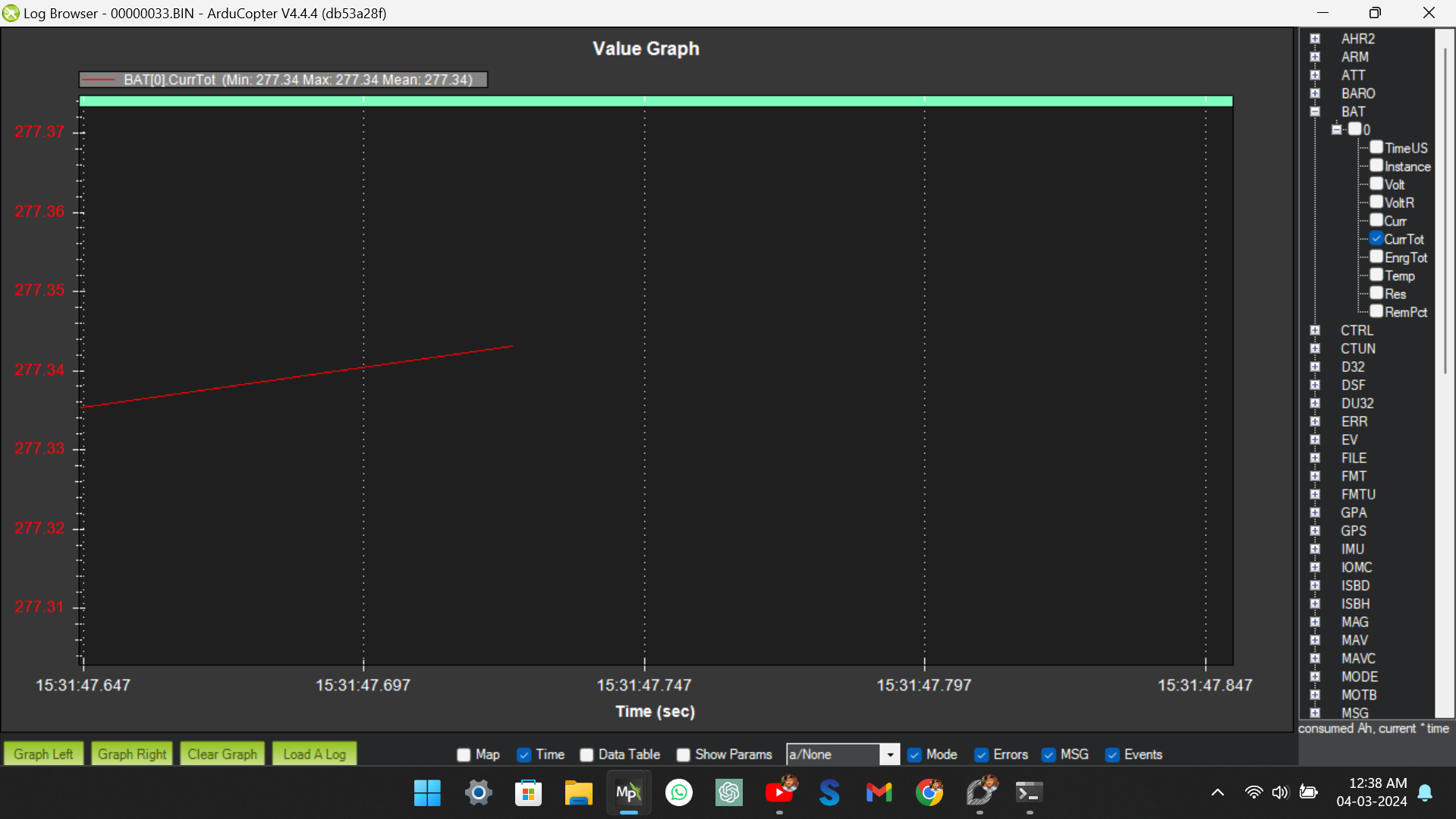
See the log, and let’s say it shows currot as 277 like in the graph.
No totally incorrect.
What is your “old amps/volt”? Hint, it’s a parameter value that you can easily find.
I won’t write the equation over again it doesn’t change.
After factoring it then replace the Old amps/volt with the new calculated amps/volt value.
Power Module
Ignore the last statement it’s not necessary. This is a perfectly acceptable method of calibrating the current sensor used by most.
@adityapruthi01 don’t do a flight until you don’t know what happens with the battery and the system. Fix the drone to the ground that the drone can’t move. Use the desired motors and props and run the system under load measuring voltage and current. to see what kind of saging exist.
Again I appeal to go systematic and step by step forward.
All information from before shows that you have a massive problem with your power system.
And as last, Dave gave you a exact simple mathematic formula. It is easy to copy this to a calculation sheet and use it as shown.
What values should I enter for these @dkemxr ?
Yes, I am going to fix the drone to the ground by how will a meaure the voltage and cuurent during the throttle, do you want me to use a voltmeter?
Yes, using a voltmeter / multimeter. But check that the equipment can work with the expected current
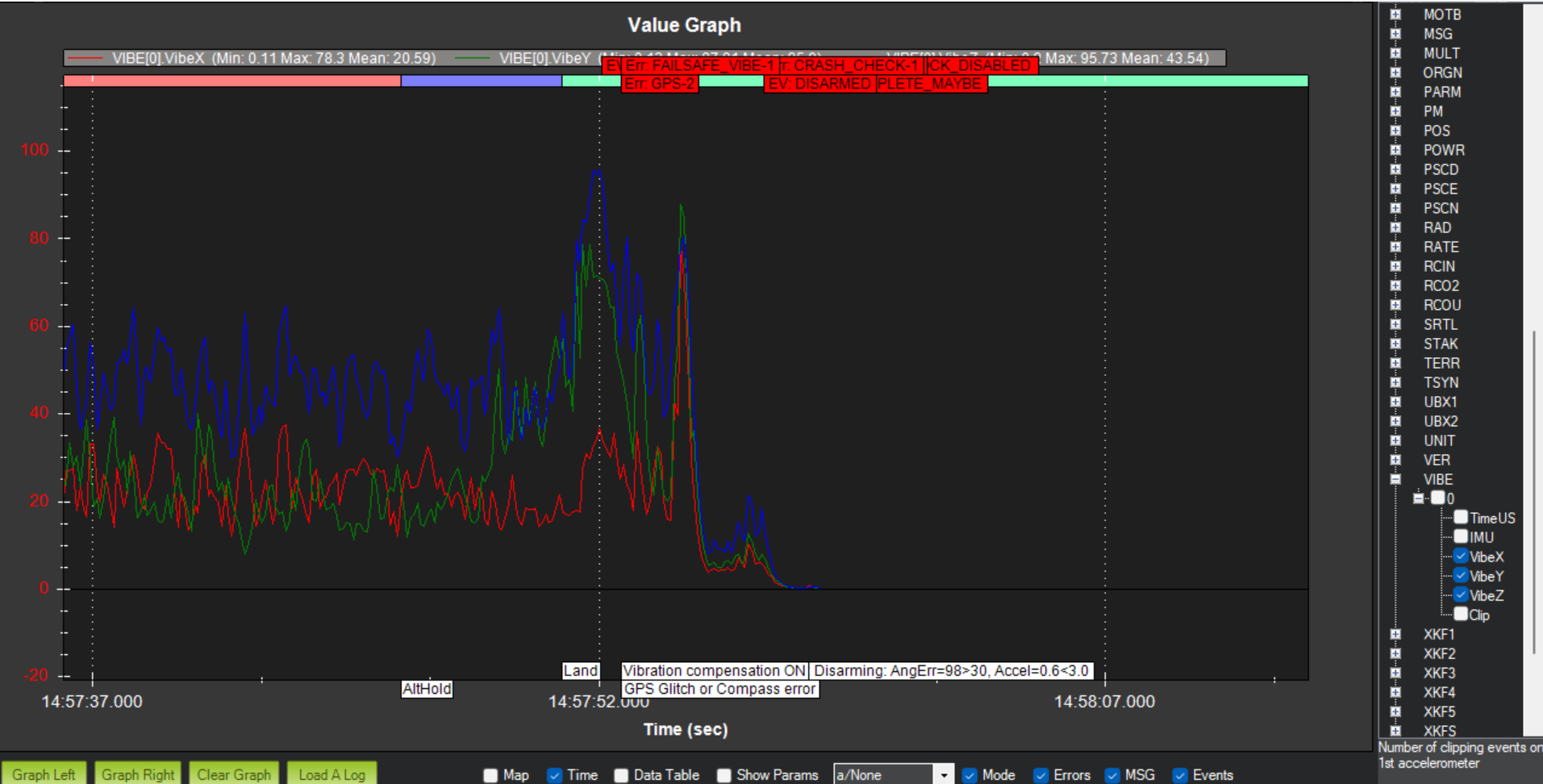
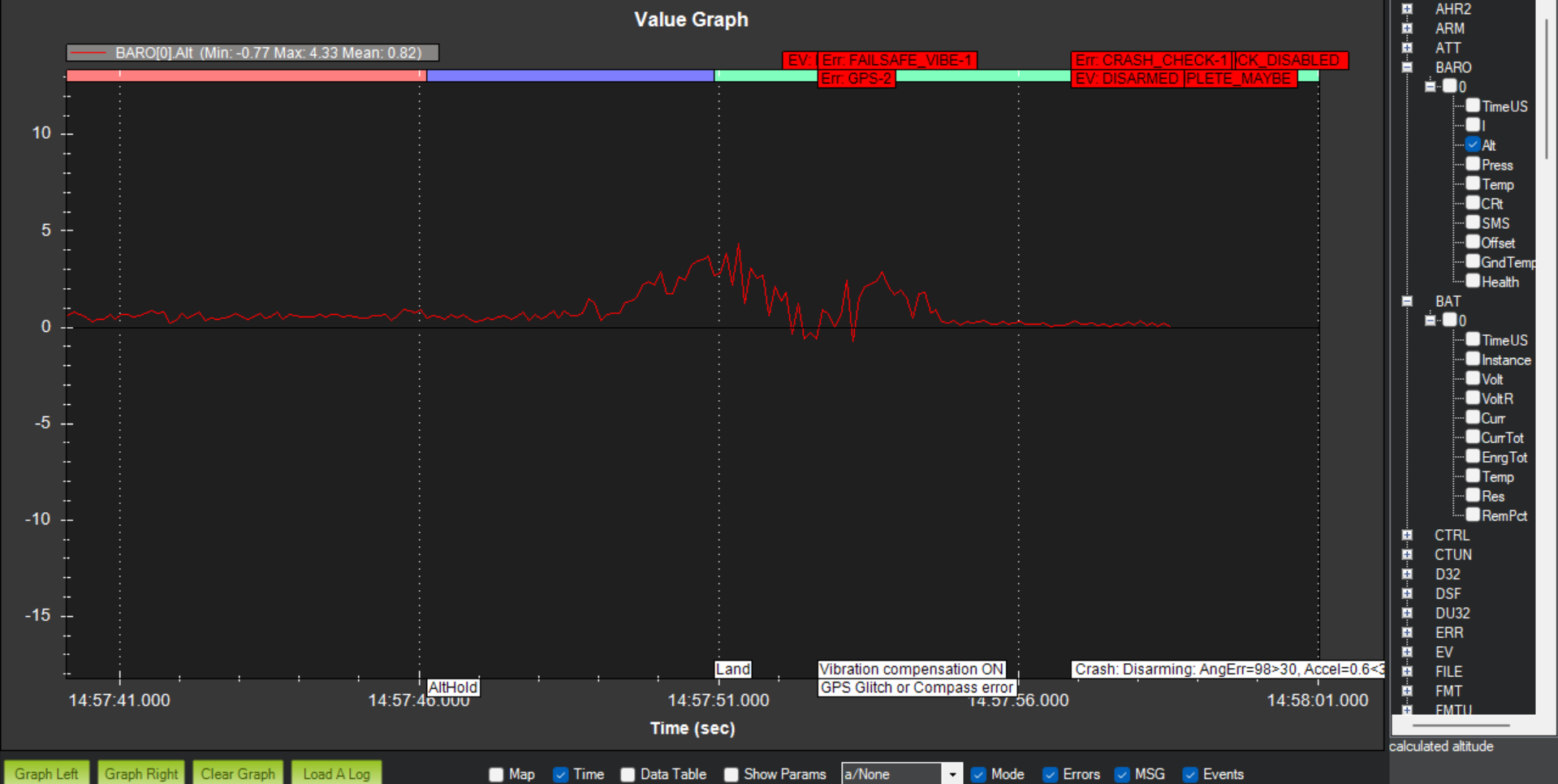
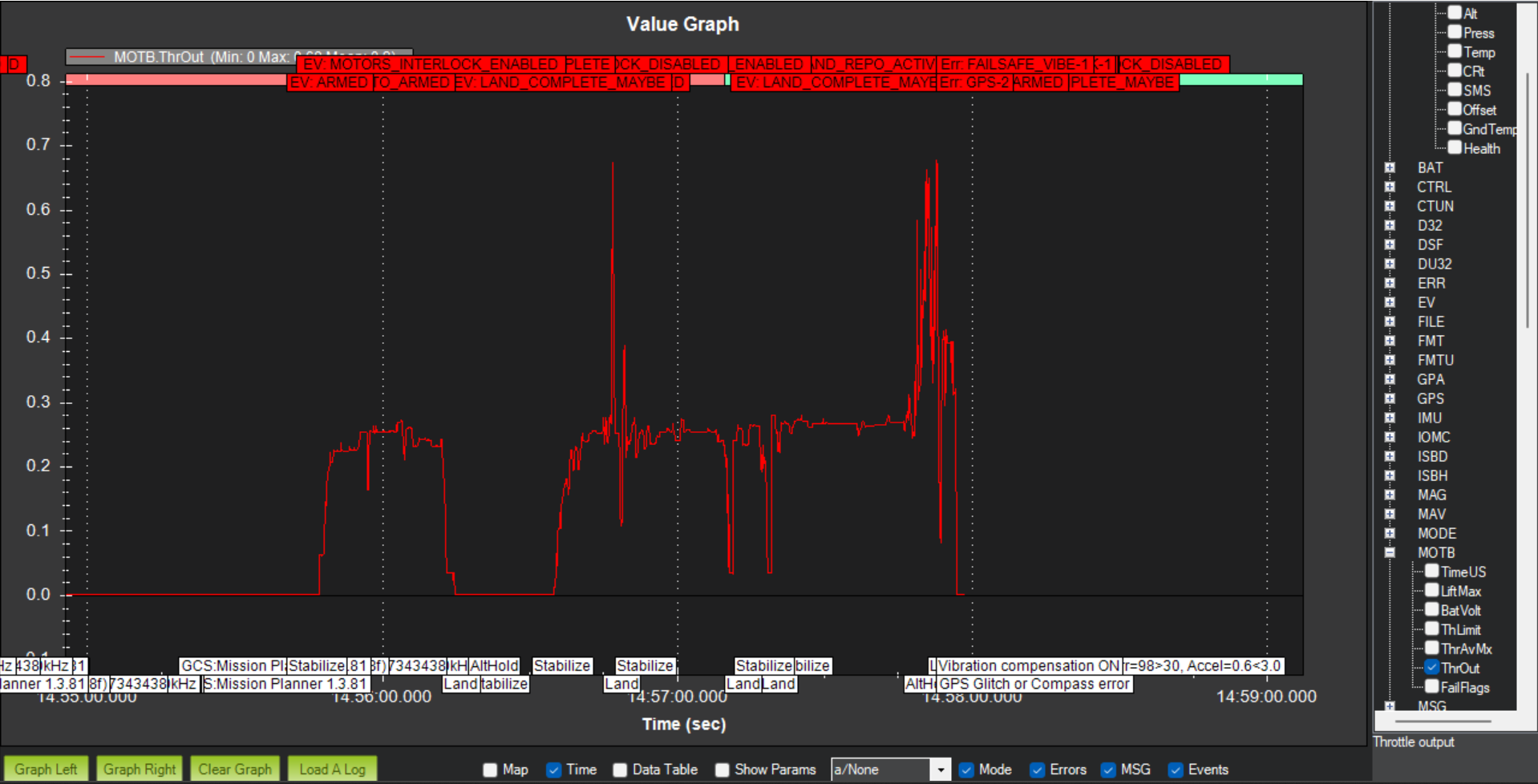
Hi all, I found a park nearby where I got the permision to fly, I did a short test flight, same result, it did not crashed badly, only props broke, but I just cannot understand why does it loses control and gain altitude on its own without intervention. I did not use Loiter mode, just shifted to AltHold Mode for 5 seconds where it lost control and then got stuck in a tree. The quad lost control twice. First time it lost, gained altitude and quickly gained control back. Second time crashed.
Some things that I can see:
Vibe levels are still high, will get down using new motors, I did not understand what is this FAILSAGE_VIBE-1. I switched to Alt HOLD and then when it lost control i quickly switched to land but it was too late.
The log file is attached below.
https://drive.google.com/drive/folders/1Gv4Bb8WlMuELfAB41wAF7tMBjxq7MjGl
Reagrds
I explained that twice. Those values are produced from the Initial Tune Parameters in Mission Planners Mandatory. You could not have read the reference material I posted links to and miss this.
But it shows 5 settings, Disabled, very slow, slow, fast, very fast. Mine is set to 110000.