When I discovered the 3DR Solo main board as a building block for DIY, because it has a Pixhawk 2 and a companion computer with HD video and telemetry for a very cheap price, I built the FrankenSolo. I used a recycled set of plates from a Daya 680 because it was wide enough for the Solo mainbrd. But it is not necessary to use a Solo mainbrd, all of this could be done with a normal Pixhawk.
https://www.rcgroups.com/forums/show…DS-FrankenSolo
But as with most DIY builds I had to do a lot of bubble gum fitting and compromising to get it all to work. The quad flew better than any of my previous builds and I was sold on the concept. I used OllW’s UC4H components to bring UAVCAN to the build. My reason to use Ollw’s UAVCAN was to have a build with cleaner simpler wiring and real time monitoring.
Since that build OllW has continued to refine and make UC4H an even more compelling platform for DIY builders. The FrankenSolo used 15" props and hovered for nearly 40 minutes which was much longer than the original 3DR Solo. I was tired of builds using pre-made frames that just don’t fit the components we need to use. The hole patterns never seem to be designed for any of the standard sized parts that are available. I also wanted to use 17" props to see if I could extend the flight time. I sketched an extended version of the Daya Mainplate that would support 17" props and have all the proper holes for the components I wanted to use so I would not have to cut and drill to try and get these components to fit.
![]()
I found CNCmadness in Britsh Columbia Canada who advertised in RCGroups to custom make CNC carbon components. Nick at CNCMadness could make the parts I wanted if I could provide him a 2D cad drawing file of my design. I struggled for almost a year just not willing to put the time into learning the 2D cad package when I was only going to use it once. Then I contacted Nick and he said he would take the digitized image of my drawing and convert it to a cad file for a reasonable fee.
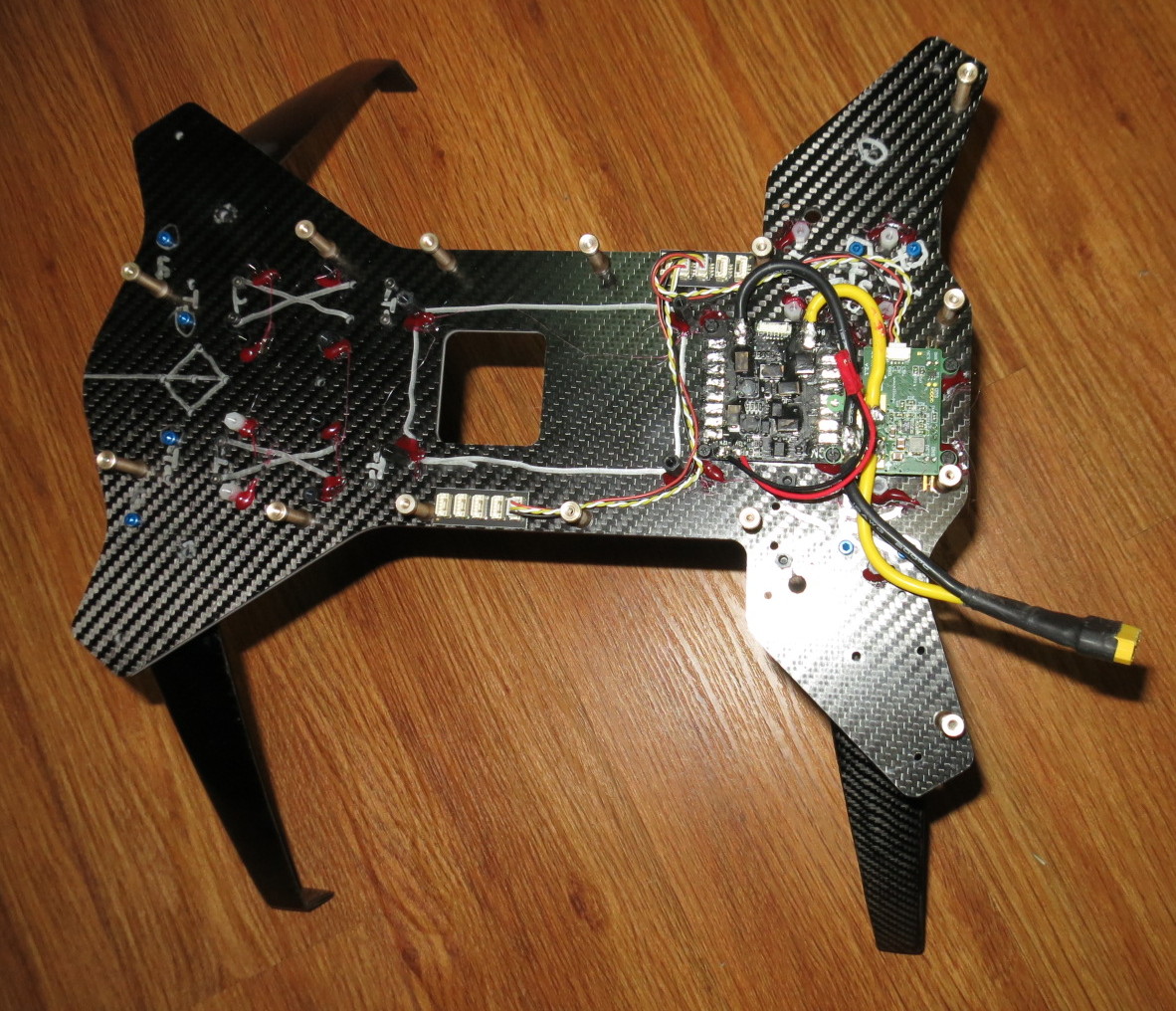
In no time Nick sent me the beautiful CNC cut carbon-foam-carbon sandwich plates for my new build.
![]() This image has been resized. Click this bar to view the full image. The original image is sized 1000x563.
This image has been resized. Click this bar to view the full image. The original image is sized 1000x563.
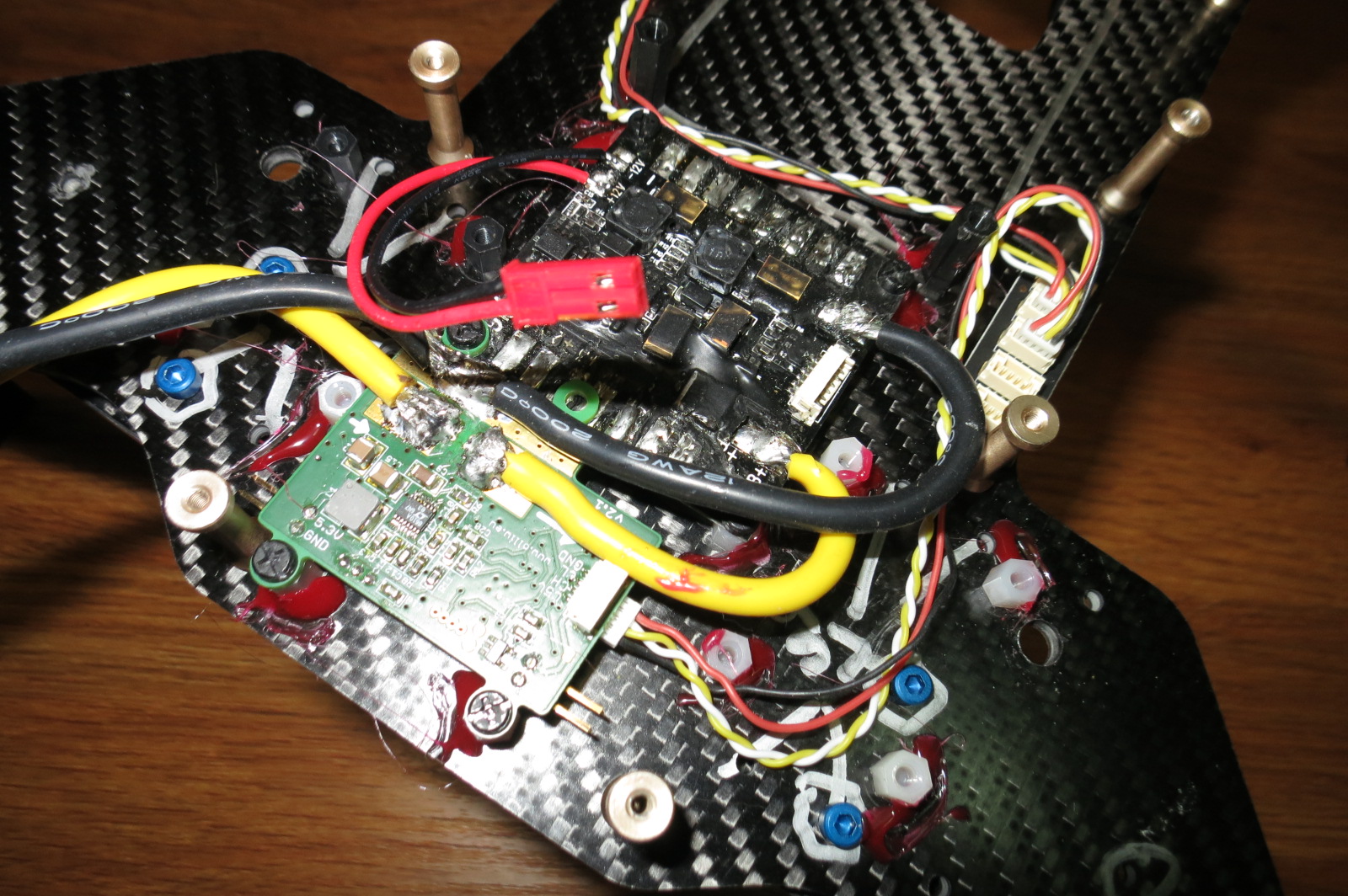
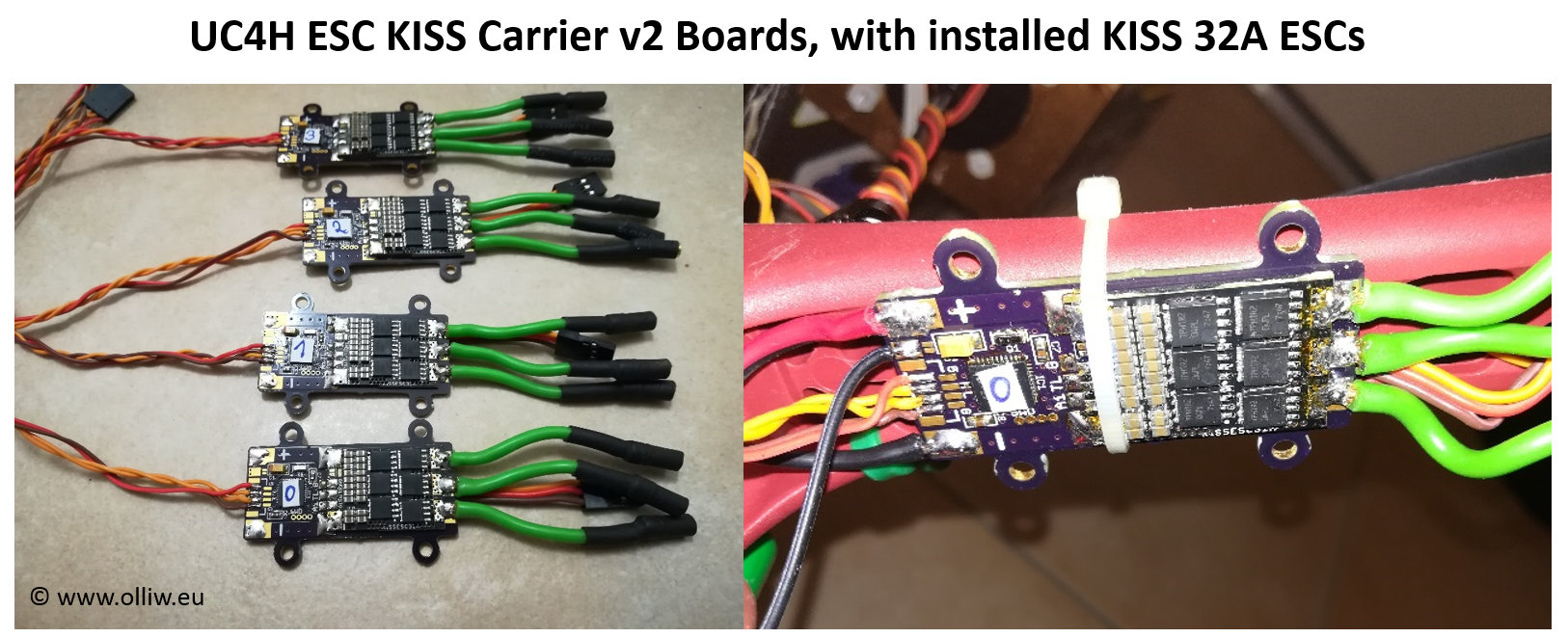
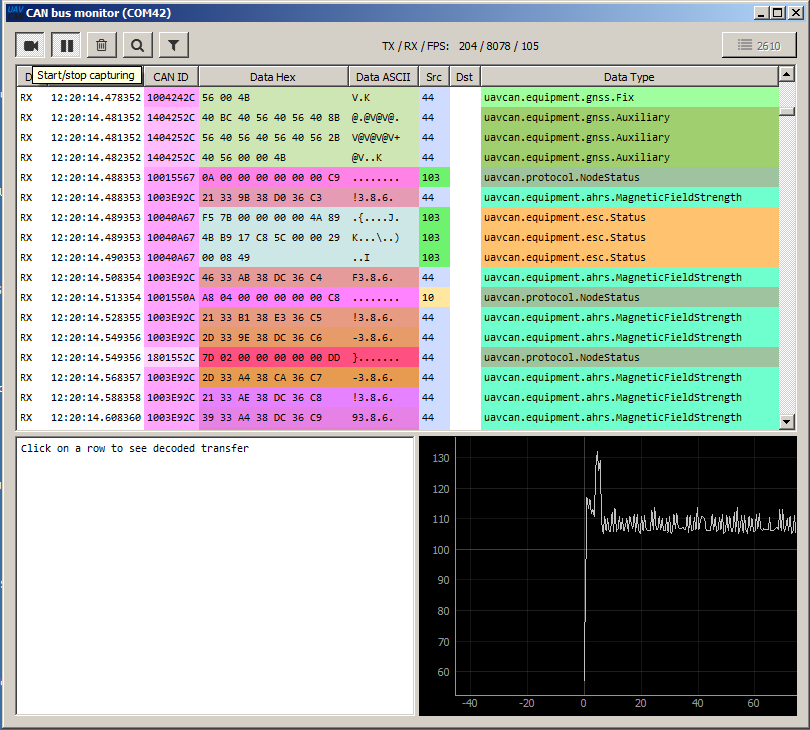
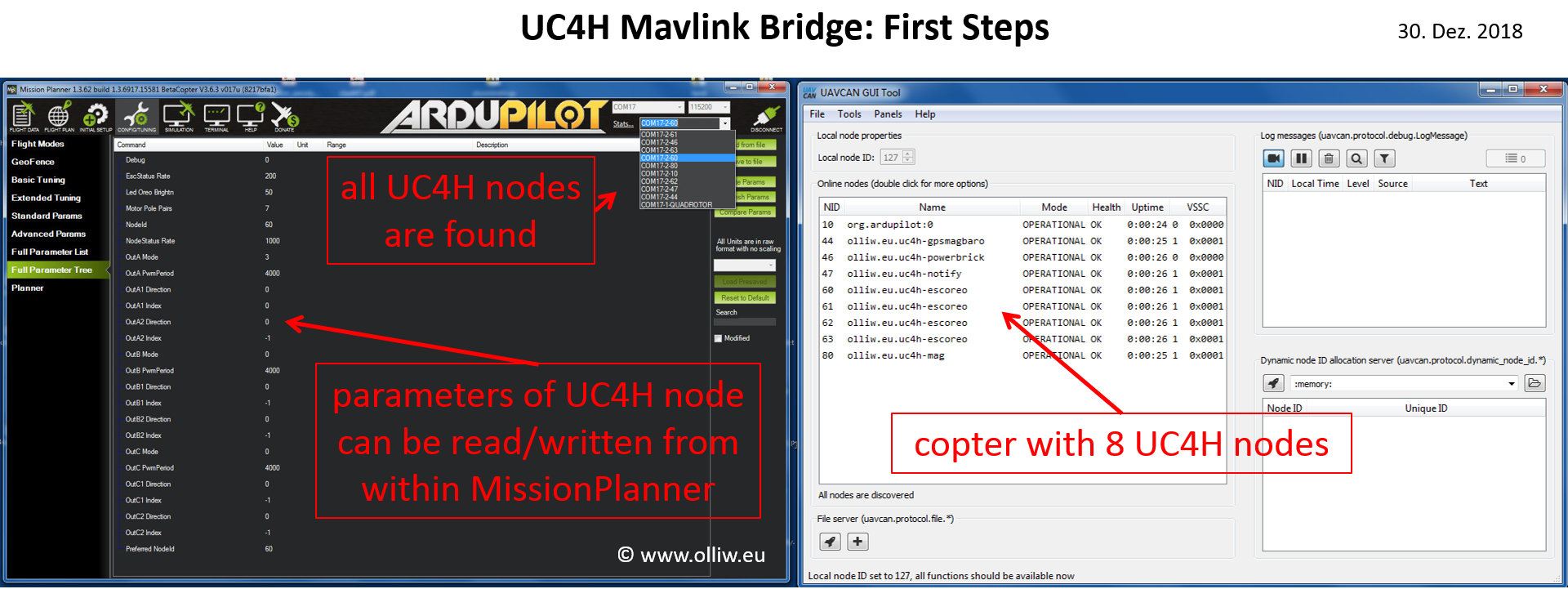
In this build I would use the next generation of OllW’s UAVCAN interface boards including ESC’s, GPS, Serial Tunnel, LEDs and Notifier and the Mavlink Bridge. Now that OllW’s designs are available from JDrones it is easier than ever to use UC4H in a build.
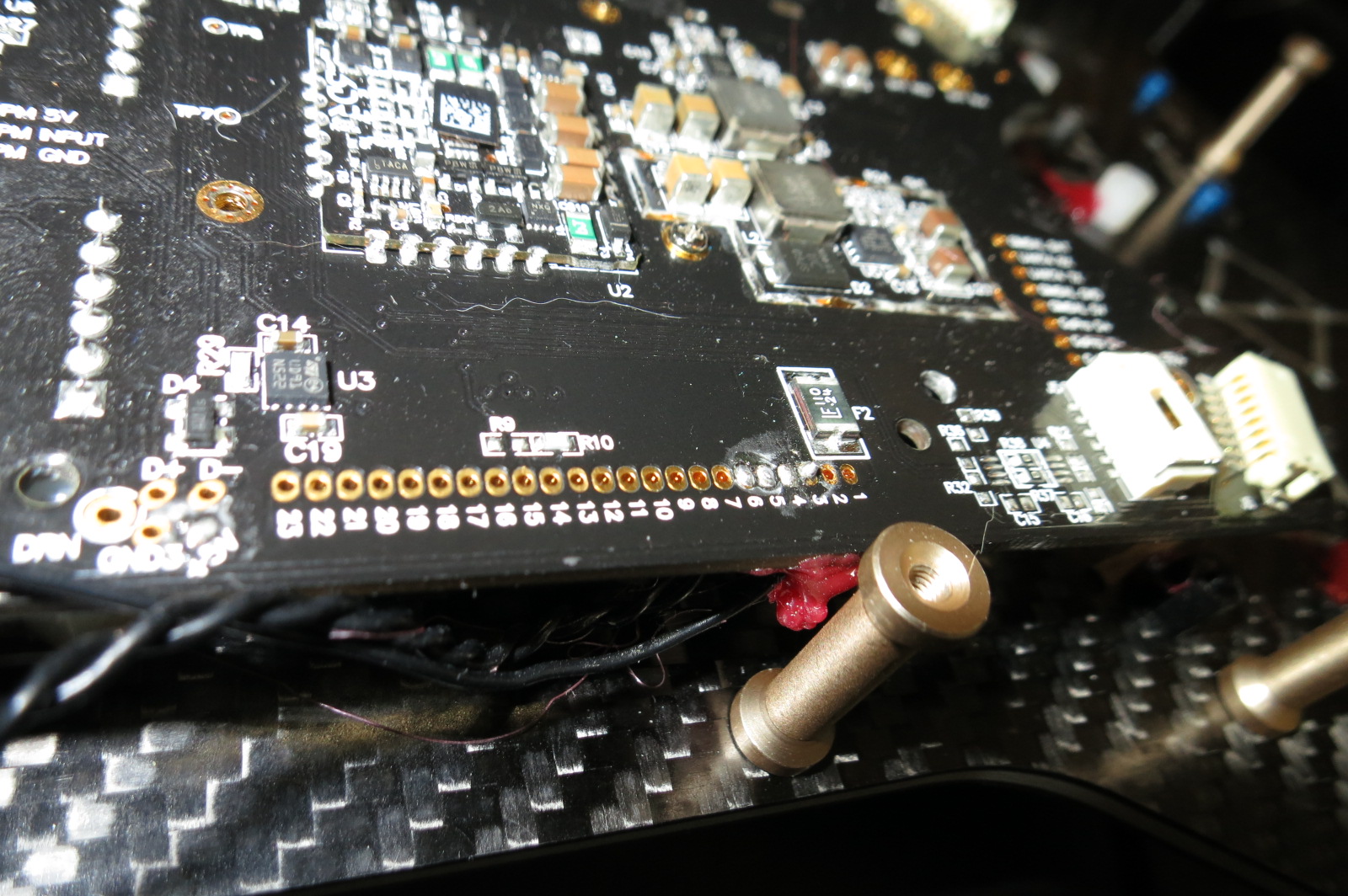
This build I will be using ProfiCnc’s Pixhawk 2.1 Green cube for the Solo with dual heated IMU’s.
Next: assembling the parts for the build





 .
.
{kind=link}