Dave thanks again !
I’m resisting to update the firmware because the pixhawk i bought was a chinese CLONE.
And this came with it (use only fmuv3 else you will brick the module) ![]()
Just stuck with it…
Dave thanks again !
I’m resisting to update the firmware because the pixhawk i bought was a chinese CLONE.
And this came with it (use only fmuv3 else you will brick the module) ![]()
Just stuck with it…
I wouldn’t believe that, they don’t know what they are talking about but up to you. 2.4.8’s can’t be clones because there was never an original. Some of the images shown in that guide are old.
In any case update to latest Stable (4.1.5 today) whether you stay with fmuv3 or not.
Hmm !
Actually I’ve tried 4.1.5 Stable.
I’m just trying out older versions now to check if some works.
Only issue i face with each is: unstable yaw and heading. ![]()
Don’t bother with that. Move forward with latest Stable and fix the issues as they arise.
I would remove the prop guards.
Actually the issue is nothing different since i used APM2.8 board on this setup. This toilet bowling and unstable heading issue was also there.
I’ve changed the FC, Battery, external compass, shielded cables etc.
But no changes.
Just can not catch where the problem’s coming from.
Fly around and post a link to the .bin flight log. That other on is too short to see anything.
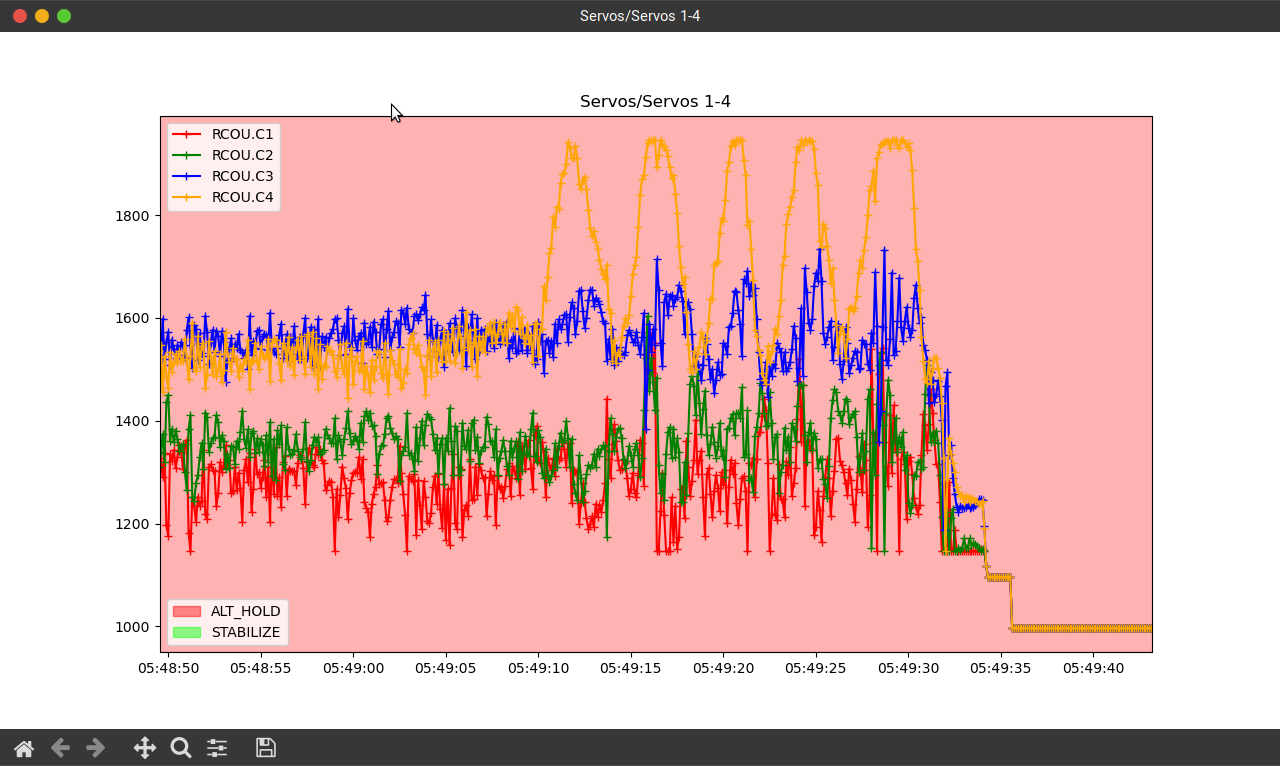
Here is a troublsome flight test (hard to control the heading and the orientation):
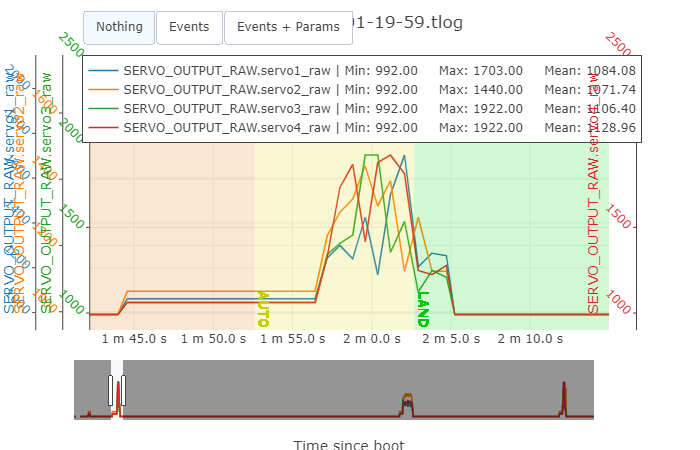
A bit stable flight test log (don’t know how the issues went neglible in this test)
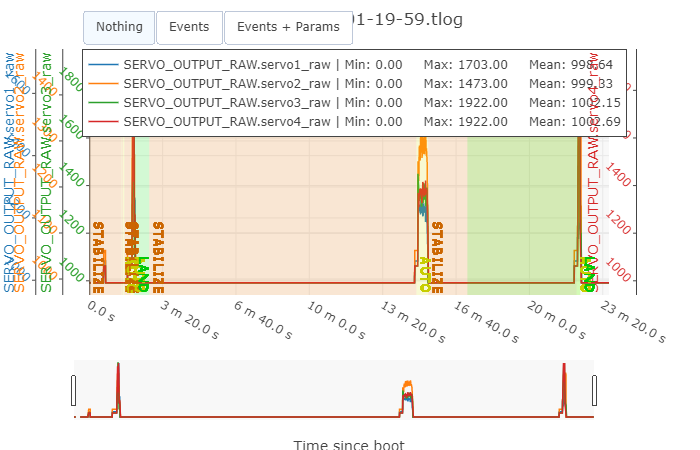
These are at default parameters, nothing to see here.
I’ve noticed lots of EKF yaw reset, yaw realignment, yaw reset errors in the log file, at the time when quadcopter caused problems during flight.
What caused these ? Any idea ?
As @dkemxr recommended you should complete the tune. Some of what you may be seeing may be a result from the poor tune performance.
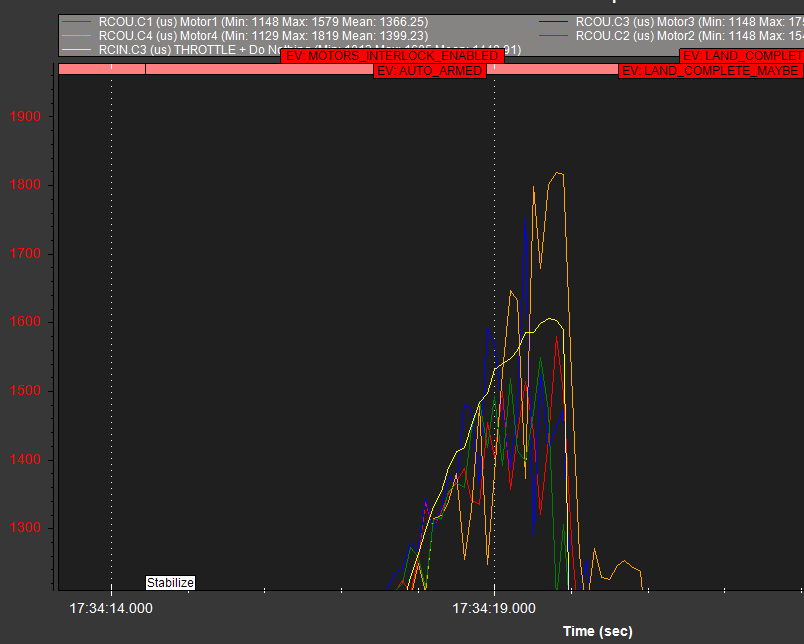
There also seems to be an issue with motor #4. This image is only a sample, but on log 25 it was repeatedly reaching maximum. Have a close look for a loose prop. Those prop mounts are intended for fixedwing installations, and have been problematic in the past for quads.
Thanks allister…
will look in to this
Hi Allister, i think i found your answer very helpful.
The motor 4 is causng the trouble.
But i’ve tried a different orientation previously where current motor 4 was motor 2 & viceversa.
I just opened up my previous logs & found that: the previously set motor 4 was also having this similar behavior (touching maximum limits) in that configuration. (When motor 4 was not this one. But it was motor 2 on this setup).
Can i please get in detail touch about this…
I’m trying fly it stable for ~ 5 months now. Still nothing…
I have’nt moved the motor or the ESC.
Only shifted the wires of ESCs for changing he front face orientation of the Quad.
As a very simple test, you can take Pixhawk and GPS out, attach the GPS to the Pixhawk with double sided tape with same orientation and connect it to it, supply them through USB, connect from MP on USB port, check that both compasses are detected, check orientation parameters (learn), and try compass calibration.
Hi !
I changed the motors with DJI 920KVs.
But the issue with motor #4 still seems stuck there.
The Quad tilt towards the #4 Motor as it takes off & makes it hard to continue the flight.
Have you done the ESC calibration and the motor test and here?
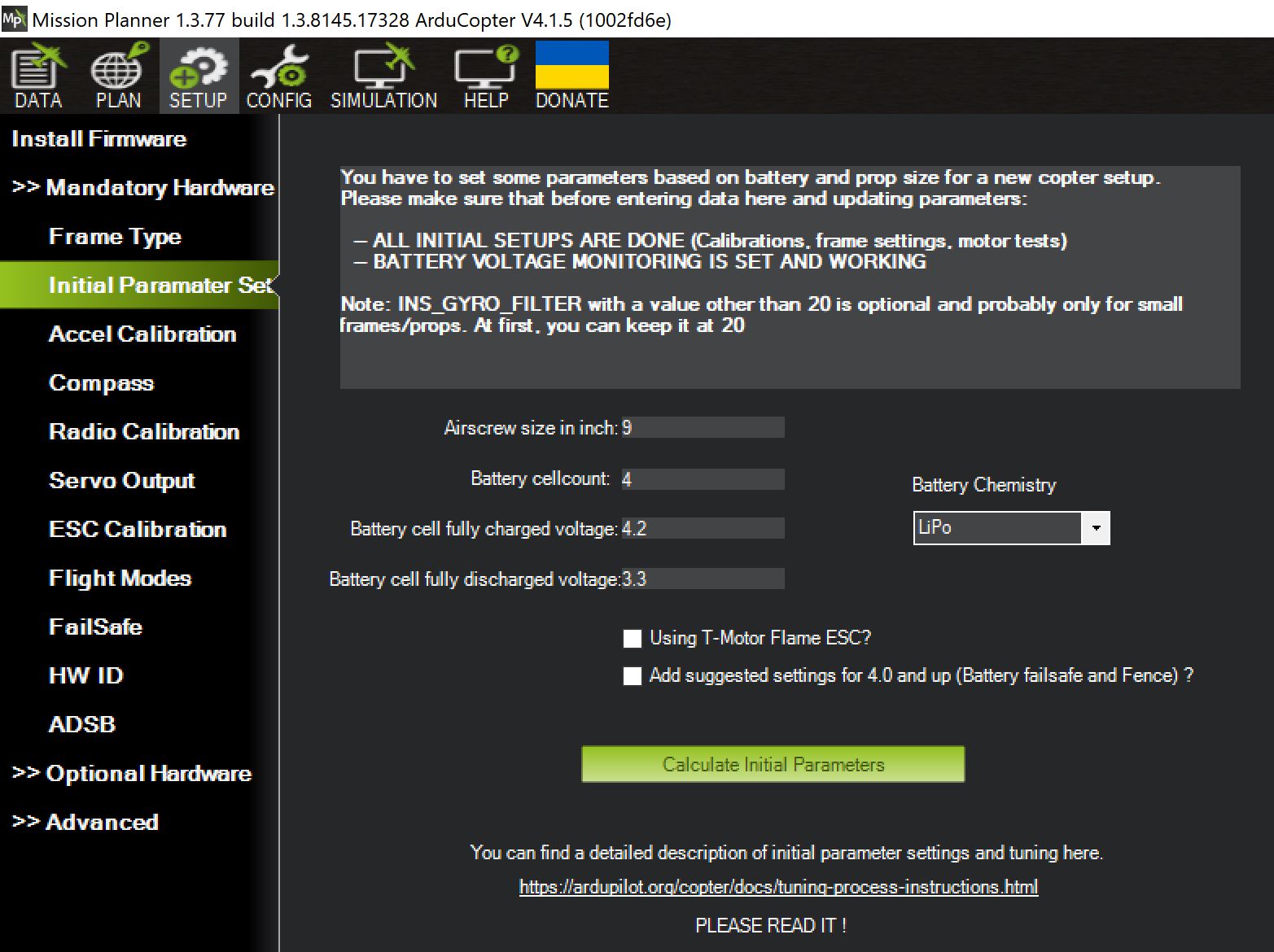
Lately, MP has surfaced a hidden function outside for setting up the copter easier, not sure are you aware or not. just curious
Hidden Function? It’s under Mandatory Hardware.