I believe there is not enough bolts on the arms to frame with this type of design. Your best bet is to slide the arms into the hub with a frame clamp for a total of two clamps. Depending on your flight controller do not use a isolated pad. 3m tape will work well. After adjusting the frame you can start the tunning.
@neel_chhatrala provide a .zip file with the ArduPilot Methodic Configurator edited intermediate parameter files.
It makes no sense finding the correct notch filter frequency if all the other parameters are wrong.
You need to do this in a particular sequence and get all parameters right. Every single one!
MyVehicleName.zip (856.1 KB)
here is my zip file for the same
in temp calibrfation i setup the parameter from mission planner so it may not there in the zip file i send to you
You created three different vehicle configuration directories from template instead of just opening the vehicle directory.
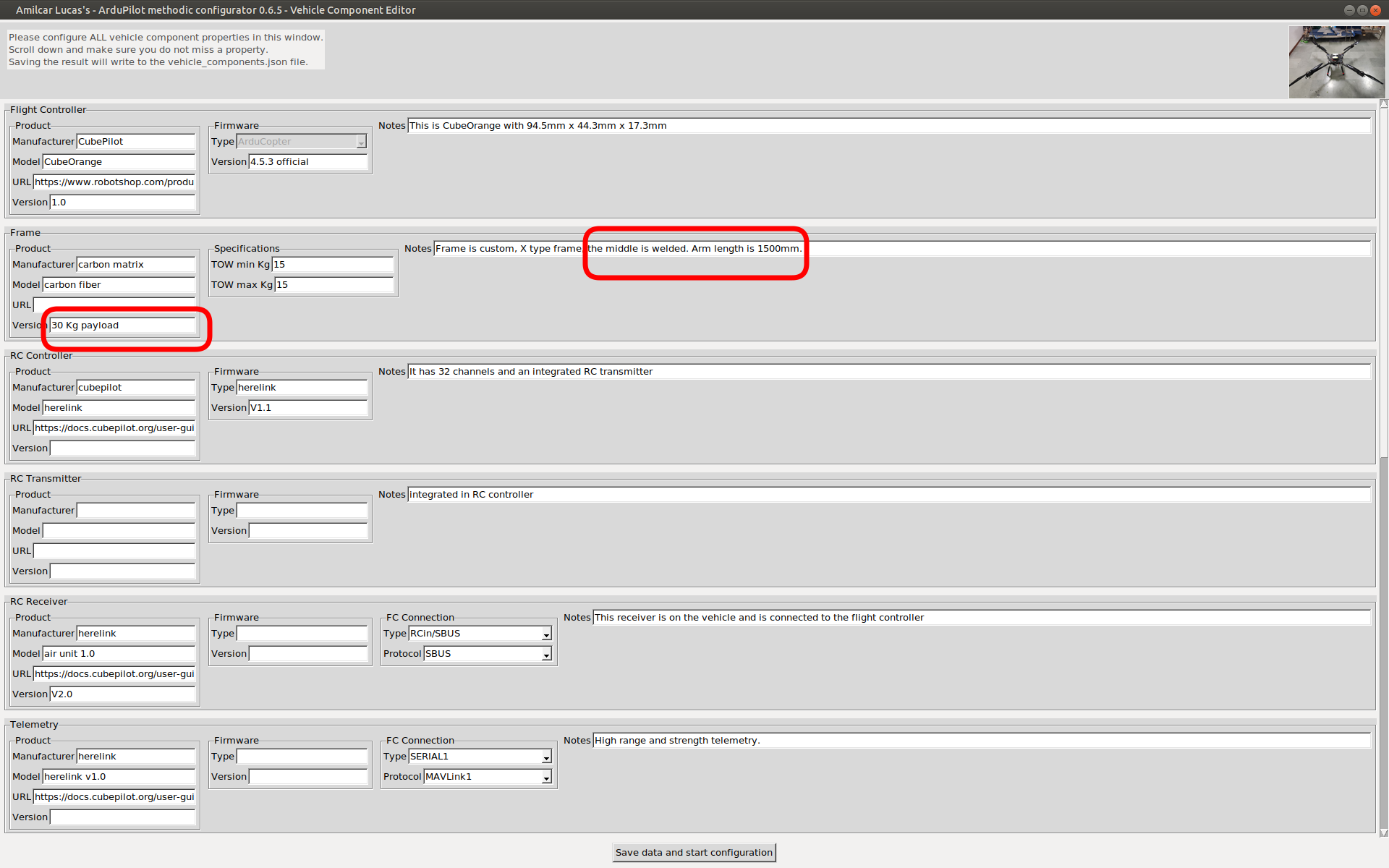
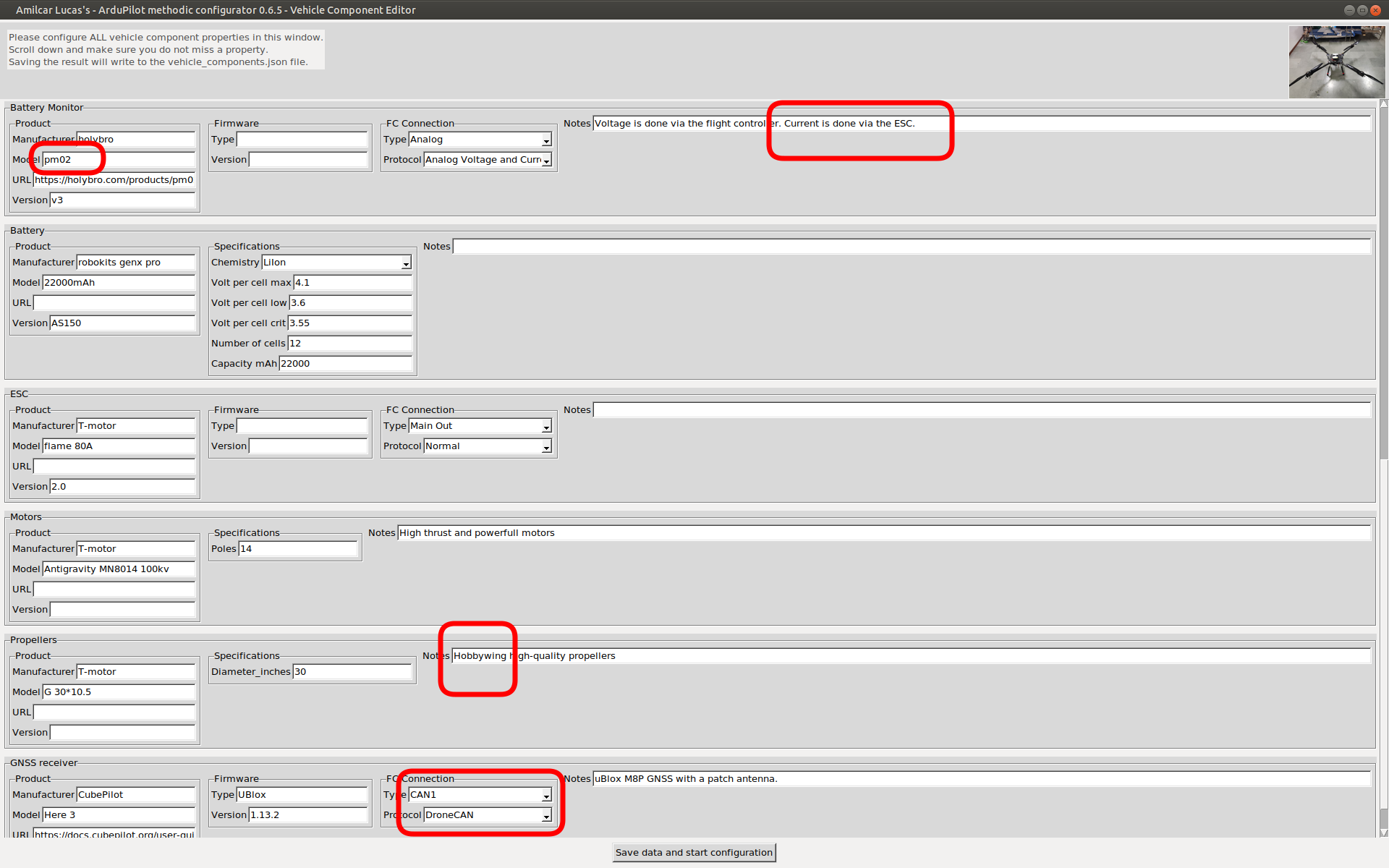
You failed to update the ALL component information in the component editor window.
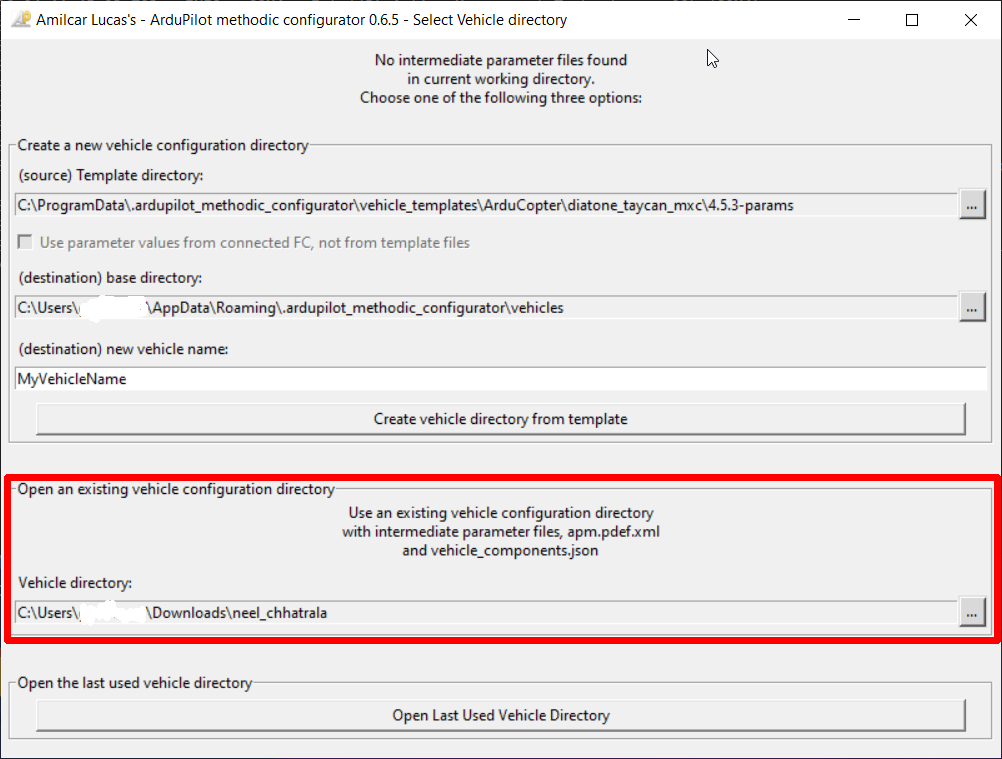
here are your files, updated and cleaned: Just extract to a directory and select “Open an existing vehicle template directory” in ArduPilot Methodic Configurator
neel_chhatrala.zip (278.1 KB)
Do not fly until you corrected the issues above.
Most parameters are still at default, and because you did not update and corrected the data in component editor I can not fix them for you.
I don’t want to make but it told that its already added and not taking me to further that is configuration thus thats i make another folder
No i added the directory
Open the newest .zip file I sent you.
Extract it
Open the directory in the configurator
In the component editor window, edit ALL values to match your vehicle. Save the file.
Zip it all, and send them to me.
here is the updated one
neel_chhatrala (2).zip (283.8 KB)
I fixed some parameters:
neel_chhatrala.zip (271.0 KB)
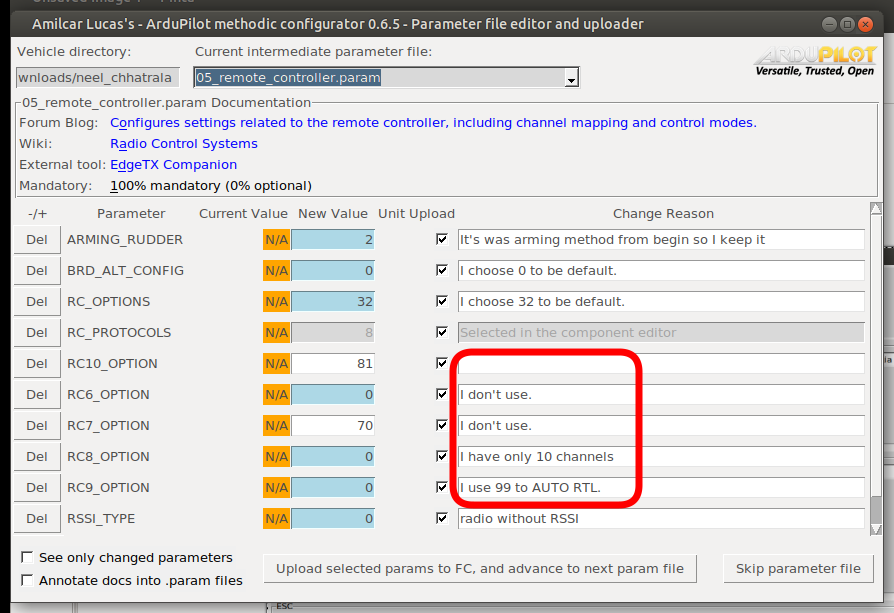
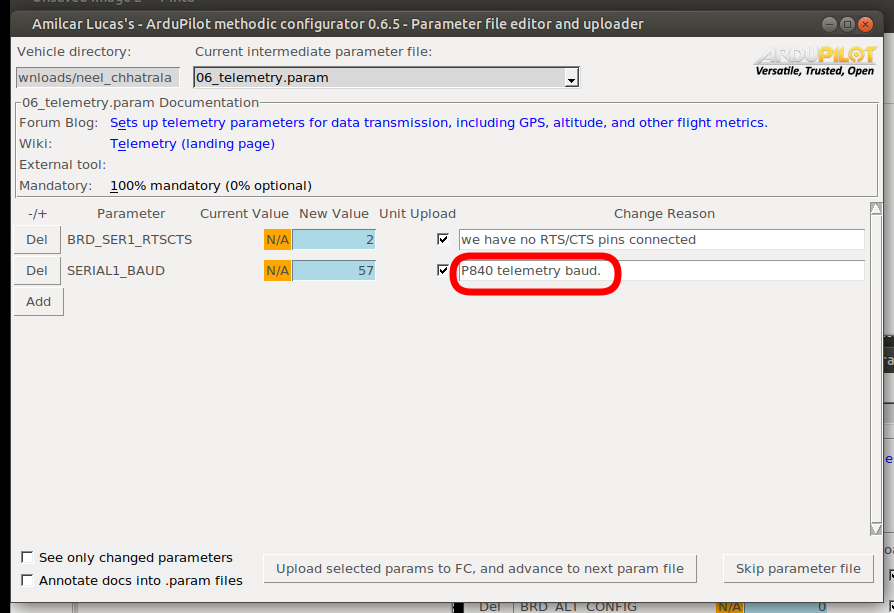
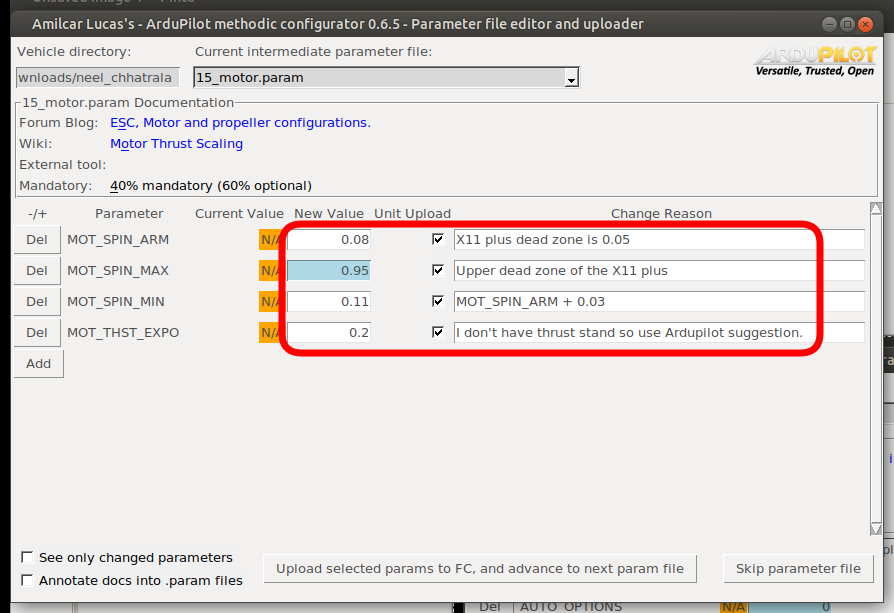
Here are some issues that I found. Are you sure the values marked in red are correct?
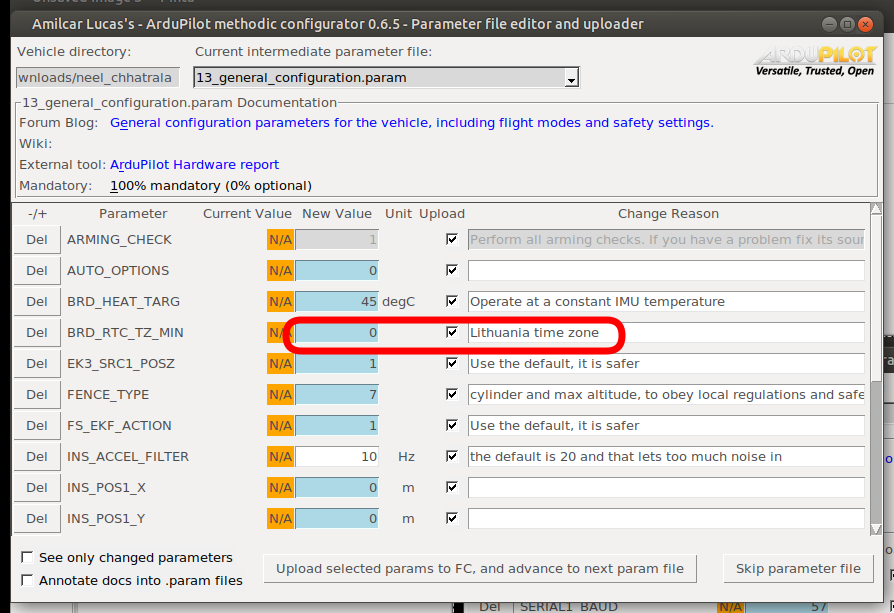
So you operate in Lituania?
And your frame is welded?
And your T-Motor Prop is a a quality prob from Hobbywing?
And you have a P840 modem connected to your herelink?
1 Like
Sorry but this its india
Not welded its a canti lever beam design and also from t-motor only did the quality check not by us.
And its herelink only but as the protocol and baud is same i didn’t vhange it
Sorry
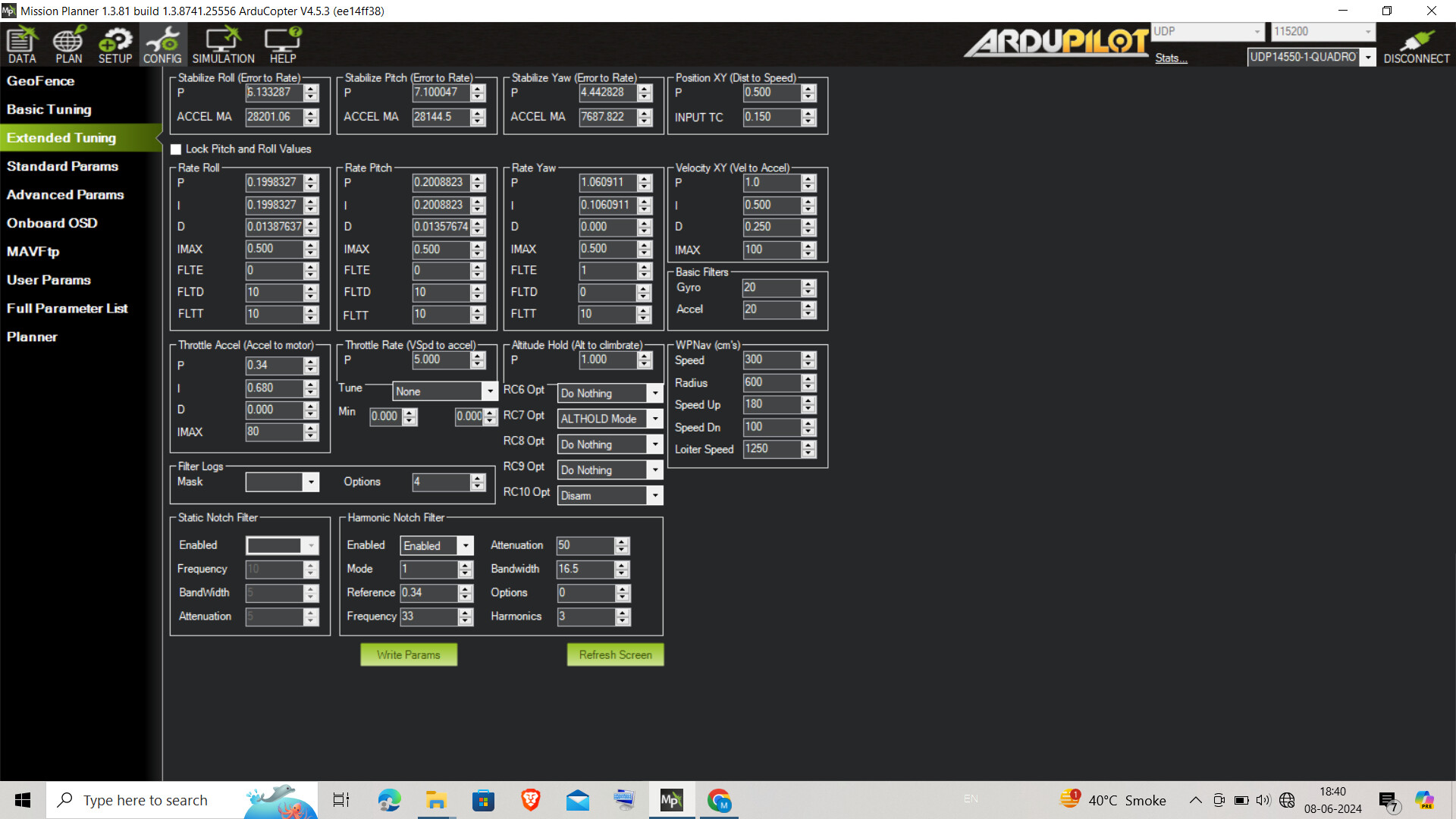
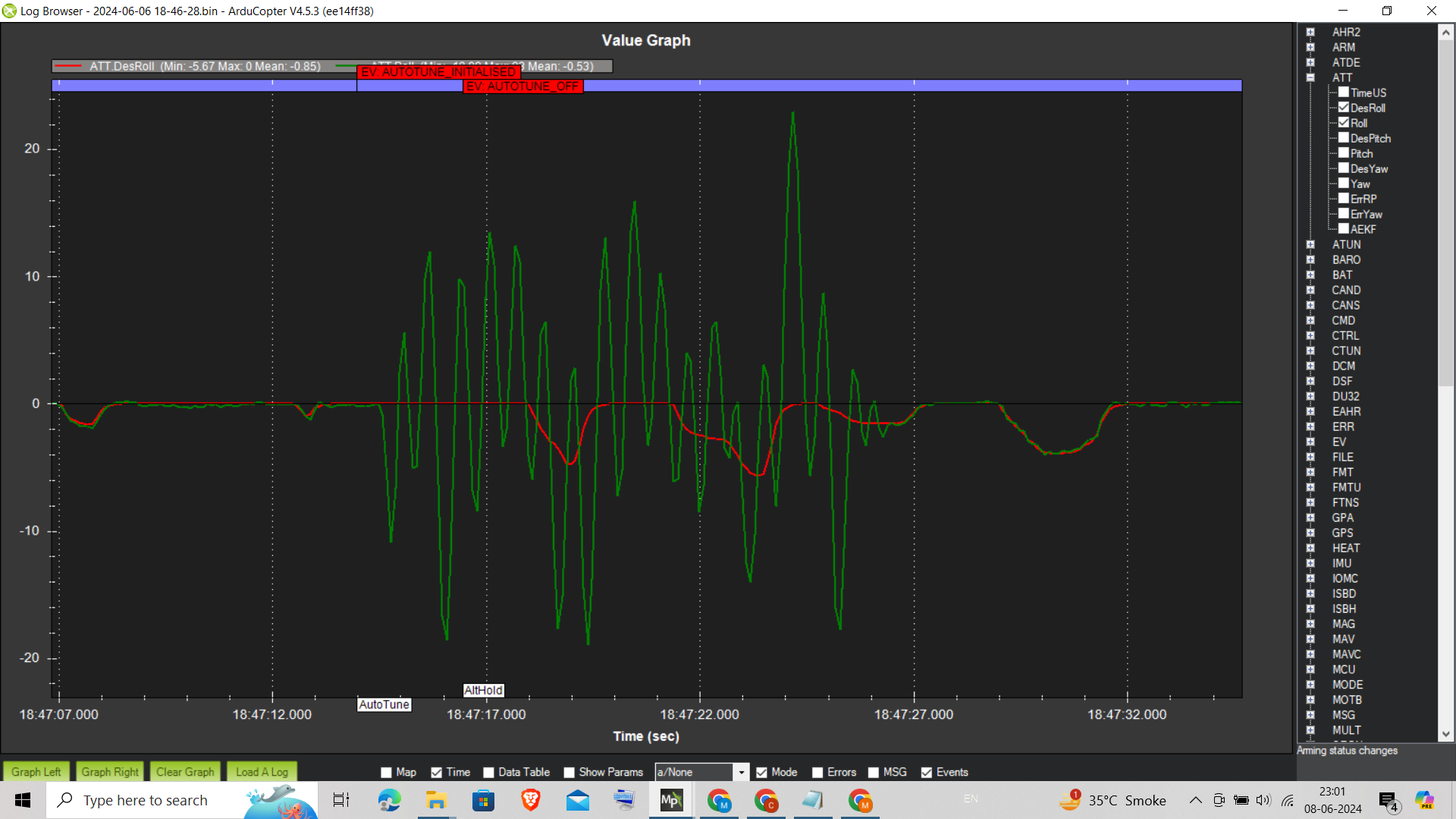
We have autotuned our Quadcopter, and after the tuning process the PID values came out to be (given below). The new PID values seems to be a bit jerky and aggressive, but the thing is it is quite accurate and follows well. So, should we consider these PID values acceptable or not? Please review the log file and tell accordingly. Since we use Mission Planner therefore, there will not be any Intermediate Param File.
The Log File is given below:
I believe is very hot in India.
You did not complete the Yaw Autotune.
you repeated Roll autotune twice and successfully.
You did not do the pitch autotune, you may have reused the previous tune, not sure. you can try to copy the Roll tunned value to the pitch and do a pitch autotune, AUTOTUNE_AXES,2
any reason why you set INS_log_BAT_MASK to 3 and not 7?
I believe ATC_THR_Mix_MAN can be set to 0.5, because UA has learned the MOT_THST_HOVER value.
You have not updated the PSC_ACCZ_P and I.
interestingly, you have set LOG_FILE_DSRMROT,1, and yet you get one big bin file and not three separate bin files.
2331 34:03.9 MSG 274435042 ArduCopter V4.5.3 (ee14ff38)
2334 34:03.9 MSG 274435073 CubeOrange 00280036 31325119 34353433
176131 34:31.6 MSG 302152185 EKF3 IMU2 MAG0 in-flight yaw alignment complete
176808 34:31.7 MSG 302259719 EKF3 IMU0 MAG0 in-flight yaw alignment complete
176822 34:31.7 MSG 302262175 EKF3 IMU1 MAG0 in-flight yaw alignment complete
469310 35:18.9 MSG 349419729 AutoTune: Started
2325703 40:01.4 MSG 631925473 AutoTune: Roll complete
2325704 40:01.4 MSG 631925541 AutoTune: Roll Rate: P:0.189 I:0.189 D:0.0169
2325705 40:01.4 MSG 631925572 AutoTune: Roll Angle P:8.219 Max Accel:31380
2325706 40:01.4 MSG 631925585 AutoTune: Success
2689889 40:59.7 MSG 690225830 AutoTune: Saved gains for Roll
3112374 46:33.1 MSG 1023590306 EKF3 IMU1 MAG0 in-flight yaw alignment complete
3112415 46:33.1 MSG 1023597854 EKF3 IMU2 MAG0 in-flight yaw alignment complete
3112429 46:33.1 MSG 1023600296 EKF3 IMU0 MAG0 in-flight yaw alignment complete
3352401 47:11.5 MSG 1062057897 AutoTune: Started
7753552 58:24.4 MSG 1734932891 AutoTune: Stopped
8819448 16:00.4 MSG 2790890291 EKF3 IMU1 MAG0 in-flight yaw alignment complete
8819489 16:00.4 MSG 2790897837 EKF3 IMU2 MAG0 in-flight yaw alignment complete
8819503 16:00.4 MSG 2790900298 EKF3 IMU0 MAG0 in-flight yaw alignment complete
9046219 16:36.7 MSG 2827240745 AutoTune: Started
11193857 22:05.2 MSG 3155773253 AutoTune: Roll complete
11193858 22:05.2 MSG 3155773279 AutoTune: Roll Rate: P:0.198 I:0.198 D:0.0138
11193859 22:05.2 MSG 3155773393 AutoTune: Roll Angle P:6.133 Max Accel:28201
11193860 22:05.2 MSG 3155773406 AutoTune: Success
11542984 23:01.3 MSG 3211818309 AutoTune: Saved gains for Roll
1 Like
You keep on insisting on using Mission Planner.
And by doing so many parameters are incorrect like @Jai.GAY said.
You refuse to follow instructions, so I assume you do not want my help.
I used T-MOTOR antigravity mn8014 100kv motor with mf3016 inch propeller and
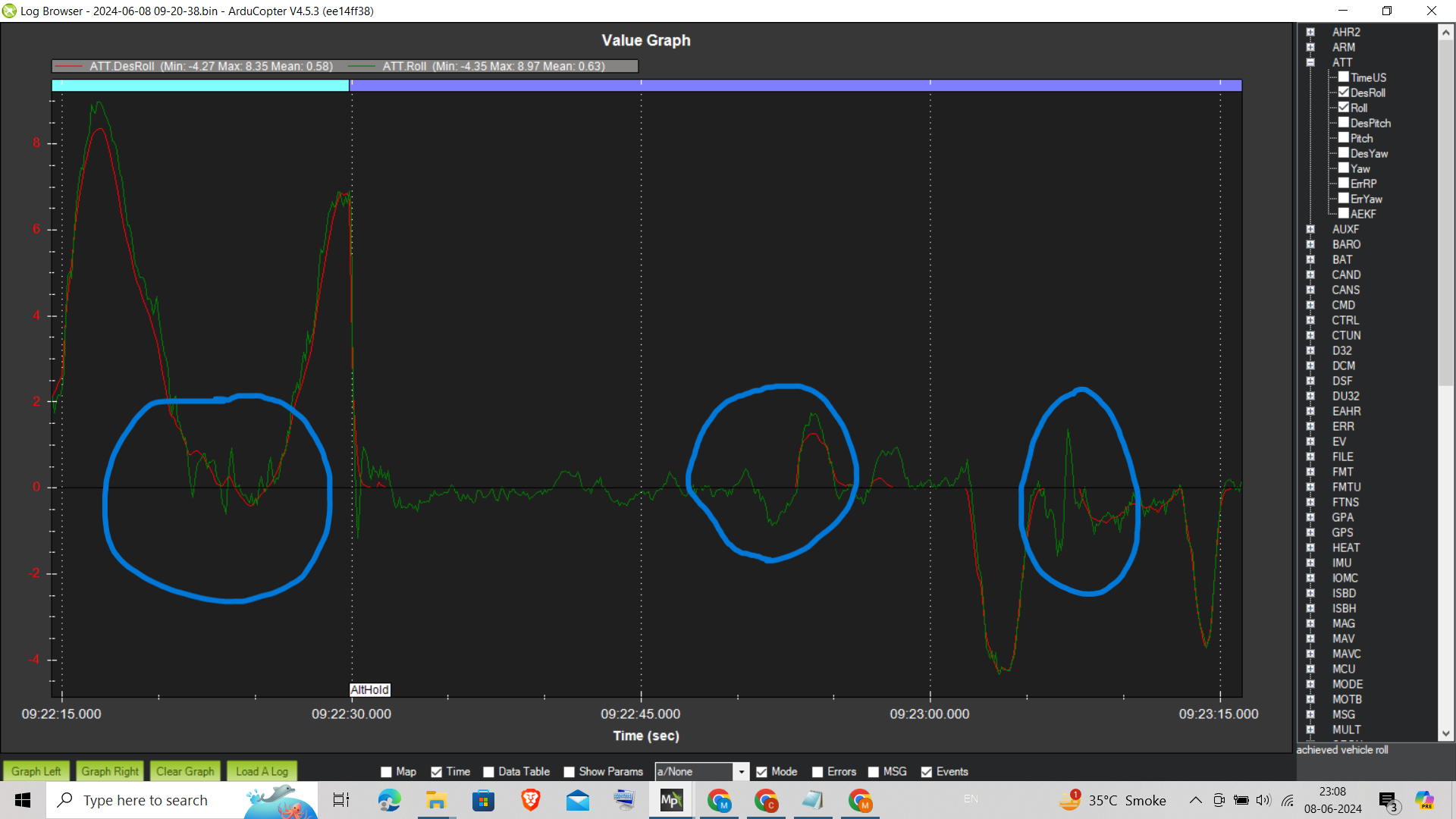
T-MOTOR flame 80A V2 ESC with 12s 22000mAh solid state battery, now as you said to tune all the three axis, I tunned it and later after observing the flight in Auto mode, roll followed the inputs but slightly wobbled as per the graphs shown below. So just to make roll a bit better I again autotuned roll but this time the wobbling were so drastic and aggressive even in normal wind conditions that
our drone almost crashed.
Though setting
PSC_ACCZ_P 0.34
PSC_ACCZ_I 0.68
in ALTHOD, POSHOLD and AUTO modes
Please look through the screenshots of the graphs and PID value and tell the further course of action?
PID value
Autotune Graph
Auto mode wobbling
Drive link of the log file.
https://drive.google.com/drive/folders/1srhDLQYNFICRTB5GiyIxZrtZwUxCugtD?usp=drive_link
The new Intermediate Param File is attached below:
updated.zip (283.8 KB)
1 Like
Under loiter flight mode, do you mean wobble / twitch during position hold? If yes, these two posts may help for the big drone. Loiter delay and reduce sensitive to position control.
I performed the new wind speed estimation according to the new B COEFF_X and Y suggested by yourself, After observing some test flights I found out that the drone still wobbles. Please help me to find out the new EK3_DRAG_MCOEFF.
attached the log file : new_windspeed - Google Drive