OK  , dont worry I share this feeling sometimes
, dont worry I share this feeling sometimes

OK , dont worry I share this feeling sometimes
Hello all,
I have got beaglebone blue with ardurover running on it. I want to read just the motor outputs and send the values though serial port instead of the beaglebone driving it. Any pointers to how that may be possible. I was going through the source code and looking through AP_MotorsUGV.cpp I thought it was my best bet. Maybe someone who is more versed with the functionality might point me to the right direction.
I could theoretically sense the ports output but thought that would be wasteful and there might be some elegant way that I am missing.
I still have no RC or radio telemetry with my BBBlue.
I’ve read through this forum and it seems I’m in good company with a lot of people have had difficulties getting a link with their RC transmitter and with radio telemetry. However, whatever worked for them has not yet gotten me out of the house.
I’m setting up ArduPlane with a uBlox GPS. At the moment, telemetry can only report through Mission Planner via the laptop’s wifi:
/home/debian/bin/arduplane –B /dev/ttyO5 –C udp:192.168.8.132:14550
So far, so good. But then I get knee-capped when I try to get telemetry via 3DR V2 (and V1), connected to the UT0 socket (UART0 tx and rx) on the Bone. I’ve installed the Silicon Labs CP210x Windows driver and upgraded firmware on the ground and air radios; they do bind when in proximity and their LEDs go solid green. On the Air side, the TX and RX wires are crossed-over to the BBBlue (the LED’s of the radio were much more active, btw, before I noticed TX was tied to TX, and Rx to Rx).
Still, with that corrected, in Mission Planner an attempt to connect (USB to UART bridge on COM11, 57K baud) just times out without a heartbeat, after a couple of red LED flashes on the Ground side using:
/home/debian/bin/arduplane –B /dev/ttyO5 –C /dev/ttyO0
or with:
/home/debian/bin/arduplane –B /dev/ttyO5 –C /dev/tty11
After many full days of frustration, I decided to take a break from it and take a whack at setting up the RC radio. “That should be easy”, I thought. I’m using a Taranis X9D with ezUHF JR 433MHz bound to an ezUHF Rx Diversity via E4 Pin 4 on the BBBlue. At that point even I was unsurprised that it didn’t work, even after upgrading firmware and successfully binding the transmitter module to the receiver.
My suspicions are that a glaring ignorance of the basic procedure and requirements for properly activating the appropriate pins is the wall I’m staring at.
Am I finally barking up the right tree? Can someone kindly please walk me through this?
A comparative, annotated startup script for ArduPlane (like the one for ArduCopter) might be helpful for those of us still grappling to understand these boards.
Thanks.
Make sure you are powering the Blue board via the DC barrel jack or the 2S LiPo connector, things won’t work right if your powering it via USB, like the Uart ports.
Not sure about EzUHF, but with RangeLink’s UHF system, plugging Port E4 Pin4 into the Receiver’s PPM out, and powering it via the 5V off the PWR port worked for me. Make sure that ezUHF’s signal output is 3.3V safe, otherwise you will have to start over with a new board. 5v+ signal into E4, Pin4 is a no-go.
I will try to test a serial modem and get back to you. I’m using 4G for Mavlink so didn’t test a normal serial modem yet.
Hopefully someone else will chime in as well.
Hi everybody,
I’m new to this community so I first would like to thanks everyone for their contributions that helped me to progress with my BBBlue. I’m at the very beginning on the road to achieve a fully functional copter (or more probably rover). I successfully passed the first step consisting of starting Arducopter on the board and connecting Mission Planner (also tested with APM Planner on Mac). I’m now trying to display voltage and current of the connected LIPO battery into the ground station. I don’t use a power module at this time. So my question is : could BBBlue retrieve those voltage and current informations just with a LIPO connected to its balanced LIPO connector ?
Thanks
I think the answer is almost certainly not. That is a 2S backup power battery connection. Even if you had a power module BB Blue cannot use these sensors and nobody seems to have figured this out – which is a bit of a drawback of the the BB Blue.
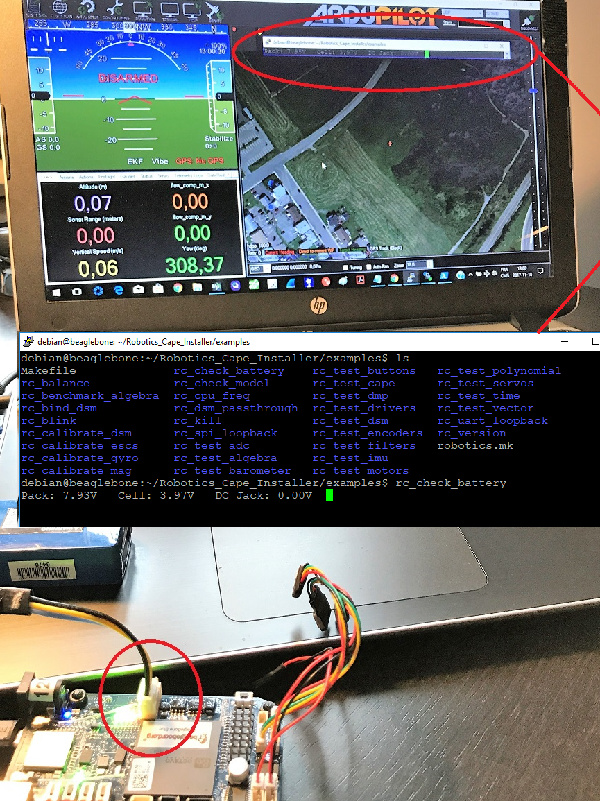
Yes you can but not within ArduPilot for the moment.
Here is how:
The BB is in fact powered via the DC barrel jack; that cable is actually run from a PDB (hubOSD) which is temporarily fueled from a 15VDC converter. The ezUHF rx is powered from the PDB, rather than the BB (only the PPM is tied directly to the BB through E4, Pin 4). I’ll verify the PPM signal voltage later today.
Regarding the telemetry radio I neglected to mention, within the Sik Radio Setup in Mission Planner I can Load Settings and both radios report. Then I Save Settings and, with ArduPlane running, try to Connect (from the Flight Data screen) without success. However, I can open a Terminal window on Mission Planner and a “Connect” there does present chatter. That leads me to suspect my BB setup.
Hi,
Thanks a lot for those quick answers. Appreciate to see that this BBB thread is so active. Ppoirier workaround (thanks a lot to him) is good to me for the moment. I just don’t want to loose my Copter so Voltage monitoring is enough to make it return home before it is too late. I hope however that it will be included in Ardupilot soon because without that it requires that I manually and constantly check Voltage to eventually send a RTL request to the Copter, involving in turn that the Copter would be at a distance covered by the ground station. Lot of constraint actually ![]()
Marc, you said :
That is a 2S backup power battery connection
Could you explain why you think that ? I did not see anything saying that it is dedicated to Backup main power. I though that it was for autonomous projects like Ardupilot. So if it is only for backing a main power, how would you imagine to power the BBB in a copter project ?
Thanks
I assumed that you were speaking about the 2S Lipo connector that is charges a Lipo while connected.
https://groups.google.com/forum/#!topic/beagleboard/PEurSe1FlFw
I am not the world’s biggest expert on this board – although I have one. I have shelved it and am using a Navio board until the voltage monitoring has been figured out!
If you are using a Frsky TX I would use a flvss voltage monitor and get your TX to alert you to a low voltage.
I hope this issue is figured out at some point.
Thanks Marc. I am more and more asking myself if this board is really the best option for a Drone or Rover project  Maybe is it too early at this stage of the Blue life. Well no matter, I will insist and continue to try with this board and…my next step is to connect my Frsky TX. Could someone tell me how you achieve it ? The two antennas coming out of the BBBlue looks like the one of my FS-I6 receiver. Is there an inboard receiver ? or are those antennas just for Wifi and BT ? If I have to connect an external receiver to the BBBlue, which one do you use ? The BBB JST connectors are not very standard (at least not the same of my receiver) and I would like to know if any receiver has it already.
Maybe is it too early at this stage of the Blue life. Well no matter, I will insist and continue to try with this board and…my next step is to connect my Frsky TX. Could someone tell me how you achieve it ? The two antennas coming out of the BBBlue looks like the one of my FS-I6 receiver. Is there an inboard receiver ? or are those antennas just for Wifi and BT ? If I have to connect an external receiver to the BBBlue, which one do you use ? The BBB JST connectors are not very standard (at least not the same of my receiver) and I would like to know if any receiver has it already.
Thanks
Well if you are using FrSky then just use a FrSky voltage monitor and you can get a low voltage alert. I have not used it yet but many have used opentx with it so that should be easy.
I think it is a good board but lack of current and voltage monitoring is crippling. If someone can figure this out it would be among the best value boards available. For me a Navio and RP3 is the best Linux choice.
Olli’s UC4H project is a contender here: he has a uavcan power brick http://www.olliw.eu/2017/uavcan-for-hobbyists/#chapterpowerbrick
It isn’t readily available, and proper support in ArduPilot is a WIP, but is worth thinking about.
James,
Would it not make sense for Ardupilot to support SBUS FrSky sensors? They
are cheap, work well, and are available. Easy for me to say I know. Maybe
FrSky would sponsor the work needed.
I agree, Ollie’s power brick looks a good candidate.
Marc
There’s no real reason why not. The new frsky protocol may be worth a look too
I do not have a lot of clout with devs. Do you think this will gain any traction? I have not actually seen many other people suggest it, but using S-Port sensors just seems to make so much sense to me.
I scanned through the issues list, and someone else has also requested this: https://github.com/ArduPilot/ardupilot/issues/6296
Because the frsky sensors and protocols are designed to provide telemetry information and not flight control data, there may be technical limitations, but that’s speculative.
@james_pattison May I suggest You open a new thread with this frsky telemetry?
You might gain more attention… meanwhile I am looking at the BBBLue ADC 
Patrick/Mirko - do you know if anyone has looked at wifi broadcast and whether it could be ported to BBBlue?