I’ve heard that 120km/h is optimal speed for a car if you want to save fuel. Is there such a battery saving optimal speed for a quad copter (7 inch/280mm)?
lol I’d say120km/h is definitely not the most efficient speed for driving a car, it’s probably closer to 20 (the point at which it’s not significantly more energy to propel forward than to just idle (probably even lower for electric cars).
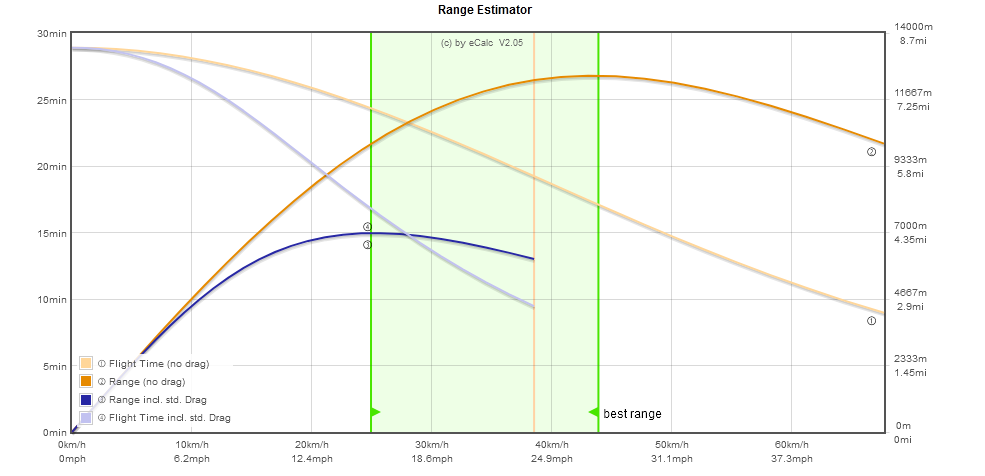
But to actually answer your question, yes this is actually more true for multirotors than cars becuse cars don’t have to expend energy to just stay in place. You can go look on eCalc - xcopterCalc - the most reliable Multicopter Calculator on the Web
That will give you a graph of range vs. speed. It isn’t perfect, but works pretty well for copters in this size range. The aerodynamics will affect this a bit but probably not more than just random wind fluctuations will.
The most efficient speed for range (for most cars) is around 50-60MPH (80-100 KPH). This is why cars have better fuel mileage ratings at “highway” speeds.
Multirotors also have a most efficient speed for range - but there is a lot that goes into this number. I have found that the eCalc range estimates are wildly off for my aircraft (1000mm motor span) - so I have to estimate drag and whatnot based on previous aircraft numbers.
The most efficient speed for range (for most cars) is around 50-60MPH (80-100 KPH). This is why cars have better fuel mileage ratings at “highway” speeds.
I don’t want to drive this topic too far off, but cars (usually) have better highway mileage becuase the nature of the city tests take into account stop & go as well as some idle time. This is also a big part of why electric cars have better city mileage than highway (regen is the other reason).
If you actually just drove at a constant 10 or 20 mph you would get way better than highway mileage.
the eCalc range estimates are wildly off for my aircraft (1000mm motor span)
I agree eCalc doesn’t do well in this size range.
I understand that the highway MPG benefits from this.
I disagree with this and can site many sources that show an optimal cruise speed around 50MPH (for maximizing range) on most ICE cars. Regardless - this isn’t the topic at hand so I digress.
Ensure voltage and current monitoring is working properly and do a few constant speed runs. you will soon be able to to judge via telemetry or logs what speed is most efficient.
If you’ve got good props or maybe something like GWS slow-fly, you might even find a speed where current drops off.
Set the new-found efficient speed as the RTL speed and probably to Loiter speed too.
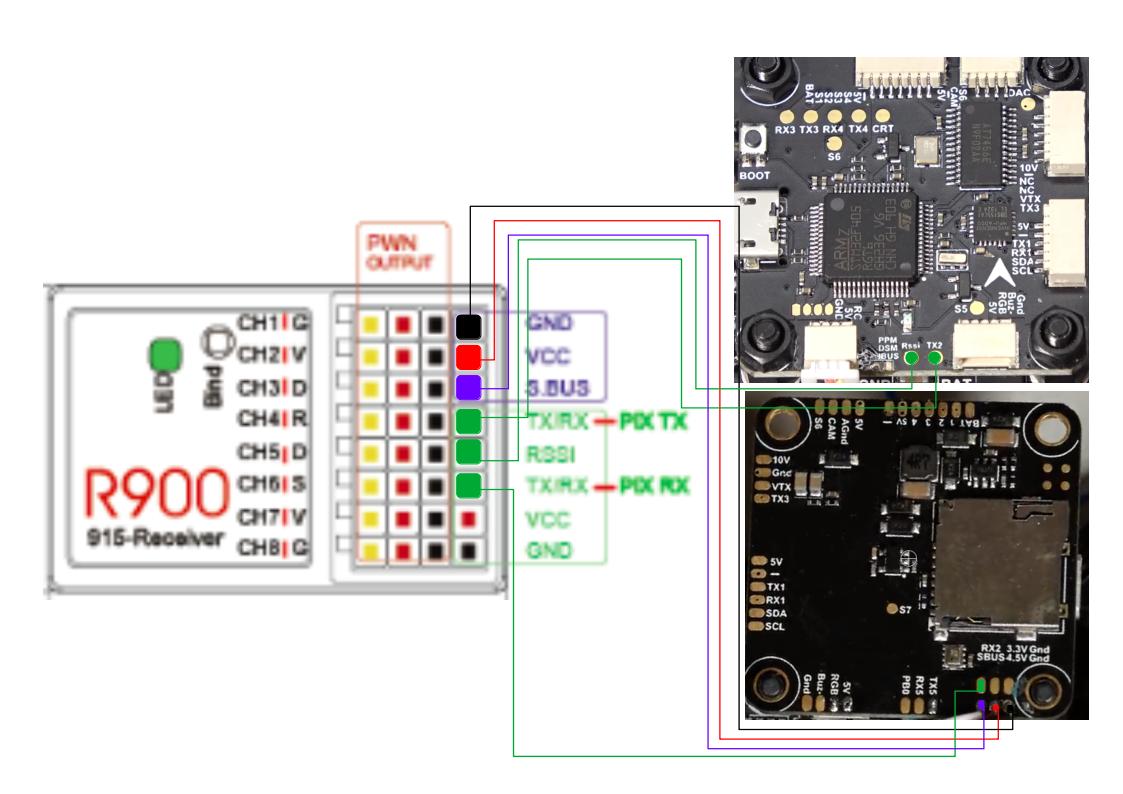
I don’t have a working telemetry and I’m not sure that it is possible to monitor current on this FC: Eachine MatekF405 clone (is it?)…
I was able to fly over 120km/h with my drone but I doubt that this is optimal speed for longest range. So I would like to hear from your experience what approx. optimal speed should such a drone have… Doesn’t have to be precise… just to get a feeling… Is it more in 30-40km/h or 80-100km/h range?.. Some technical details: 280mm, 1kg, motors: 2507 1800KV, 4s, props: T7056C.
It depend on how much funtionality was cloned. Look at the specs for the Matek F405-STD, it has an external current sensor input (standard 3.3V range)
Whatever you determine experimentally like everyone else has done…
I don’t see Curr on this zoomed in photo of the FC as on the original Matek F405-STD… Can it have some other label?..
Usually they are marked “Curr” but perhaps it’s the “DAC” Pin. Configure battery monitoring and put up to 3.3V on that pin and see what you get.
It’s going to depend on a lot of variables (prop pitch, weight, aerodynamics of the quad, density altitude, etc) The best thing to do will be get your current meter working and just watch what’s happening. If you really want to make it scientific I would use a flight plan with long lines (200m+) at different speeds. If I had to guess I’d say some where around 40% to 60% of your top seed will be the sweet spot.
Yesterday I was flying my F450 that has a Matek F405-STD.
Here’s a graph of the current while I was playing with zig-zag mode with ~65m lines
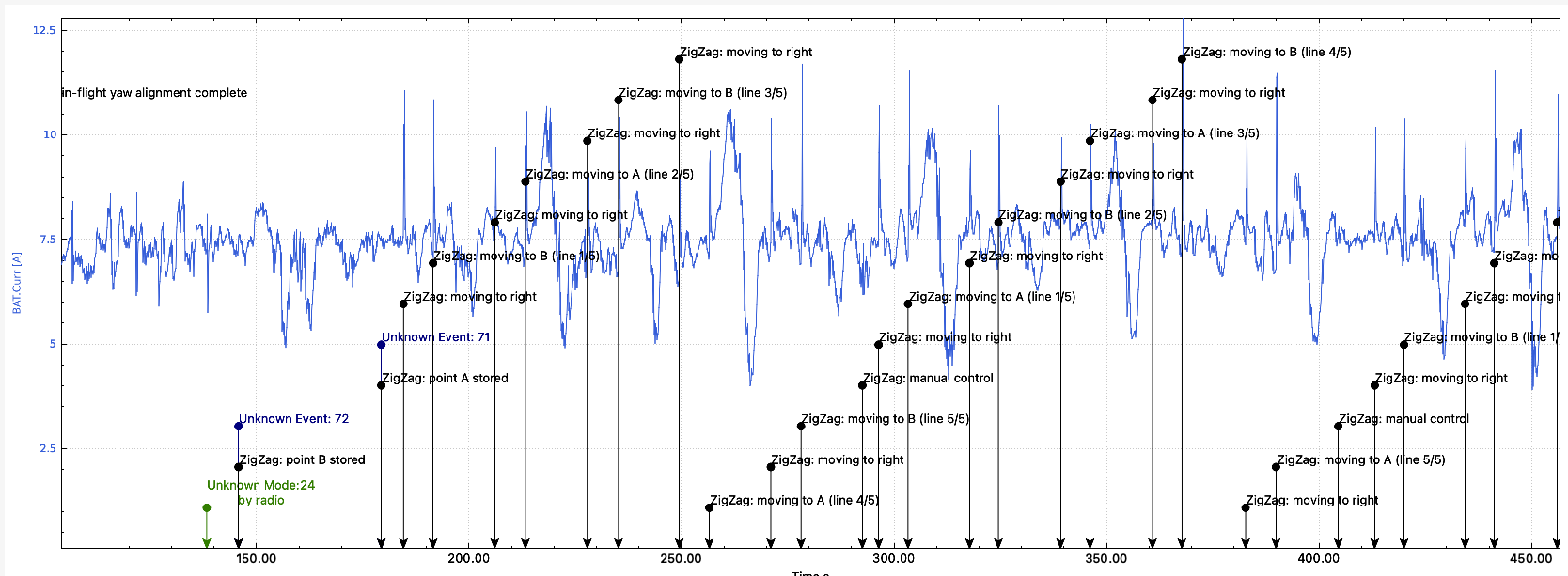
You can see that starting and stopping used the most power. (no surprise I’m sure) That’s also why I suggest longer flight lines to test it because it takes time for things to stabilize.
Looking at some other graphs from yesterday:
Hover: between 7.5 and 8.5 amps depending on the weight of the battery (1300mah vs 2300mah)
10m/s cruise: 10 amps to accelerate but stabilized at about 5-6 amps. (RTL)
15-18m/s full forward: 15+ amps to accelerate but stabilized around 10 amps.
Of course battery voltage will skew all these numbers too, but I hope these numbers give you some ideas of what to try out.
Your milage may very.
2 Likes
I would do simple experiment. In betaflight You can turn on osd component that will count: flight time and flight distance.
Then fly whole battery each time at constant cruise speed. Write down result:
flight time, distance flown, mah used
When you have several measurements done, You can easily plot this data in excel to optimize either flight time or distance flown.
If You post data from Your measurement I can plot it. I am curious about this experiment. From my experience I will shoot that my 5 inch quad has best efficiency at around 40-50 km/h, as It take around 10 Amps of current at this speed.
Actually You can do second measurement - speed at constant height and speed vs current amps drawn
This should also show you optimal working point for your drone, as amps are proportional to power used Power = I^2*R. From aperage you can calculate flight time (time do battery discharge), from flight time and speed you can calculate distance flown.
That my ideas.
Kacper
1 Like
{kind=link}
{kind=link}
- What does it mean “no drag” and “std Drag”?
- Which parameters are these? These: 280mm, 1kg, motors: 2507 1800KV, 4s, props: T7056C?
.
Obvious and Cd=1.3
The ecalc graph I put there is just one I had at the time, it’s not related to your specifications. We’ve found ecalc can often give conservative results.
That is due to the fact that a typical automobile engine has a “sweet spot” in the torque vs RPM curve at about 2500RPM. The drive train gear ratio is designed to exploit this such that @ 2500RPM in 1st gear the vehicle is running at 25 MPH, 2nd is 35, 3rd is 45, and 4th is 55. In light of this fact, tire sizes, tread pattern, rubber compounds, side wall compliance, tire pressure (and hence tire temperature), road surface, and weather conditions all play role.
Equating this to aircraft performance is futile… In a quadcopter you should be looking at endurance (flight time) and not speed. In this regime, light frames with low KV motors swinging “big” props rule.
If you really want speed then you need to do some wind tunnel testing to find and eliminate sources of drag…
I trust eCalc about as far as I can throw a fully loaded Nimitz class aircraft carrier.
DJI drones have long flight times and they fly around 50-60 km/h. Most important I think is to get power efficient engines. There is a line of engines (dont remember name) that were designed for long range drone fpv.
Besides that regular advice like bigger prop is more efficient, Lion batteries have better mah/weight ratio than Lipo, and the most important factor - weight of the drone.
Long range drones as I have seen on YT have current draw between 6-10 Amps for 7 inch. Easy calculation: at 10 Amp you get 10 000 mah per hour. So if you want to fly one hour on 5000 mah battery You need to reduce current to 5 Amps ![]()
Or simply get a fixed wing ! ![]()
Is translational lift a significant phenomenon for multi-rotors? Obviously, the trailing rear rotors would be running in the wake of the front rotors, but it seems there could still be some benefit?
I believe that Translational lift is present in multi-rotors. Depending on the configuration of the rotor system the rear rotors may be operating in reasonably clean air. I base this on two observations: 1) using older non-stabilized quads I was able to demonstrate translational lift to students by holding in a fixed hover throttle position and when only pitching forward the quad would climb as it accelerated. 2) Current demand is lower at a reasonable cruise speed than in hover. This is backed up by companies like DJI even publishing flight times noting that the hover time is lower than cruise time. But just like a full sized helicopter, eventually the effects of drag will outweigh the benefits of translational lift.