Hi,
i’ve just builded my first quad, powered by a raspberry pi 3 with navio2 shield.
Motors are 4x Emax MT2213 935kv.
ESCs are SHINA 20A with BLHeli.
At first my copter was totally not flyable, so i modified PIDs via MissionPlanner and it worked quit well. After that, i was able to hold it in the air for severals minutes (it was very exhausting and my nerves were strained). But it worked…tested Stabilize and AltHold mode.
Then I tried autotune…it was a short fun…
After a few seconds the copter tilted to the right and crashed.
Done it several times. After more or less seconds the copter always crashes, when in autotune (Sometimes on the right, sometimes on left).
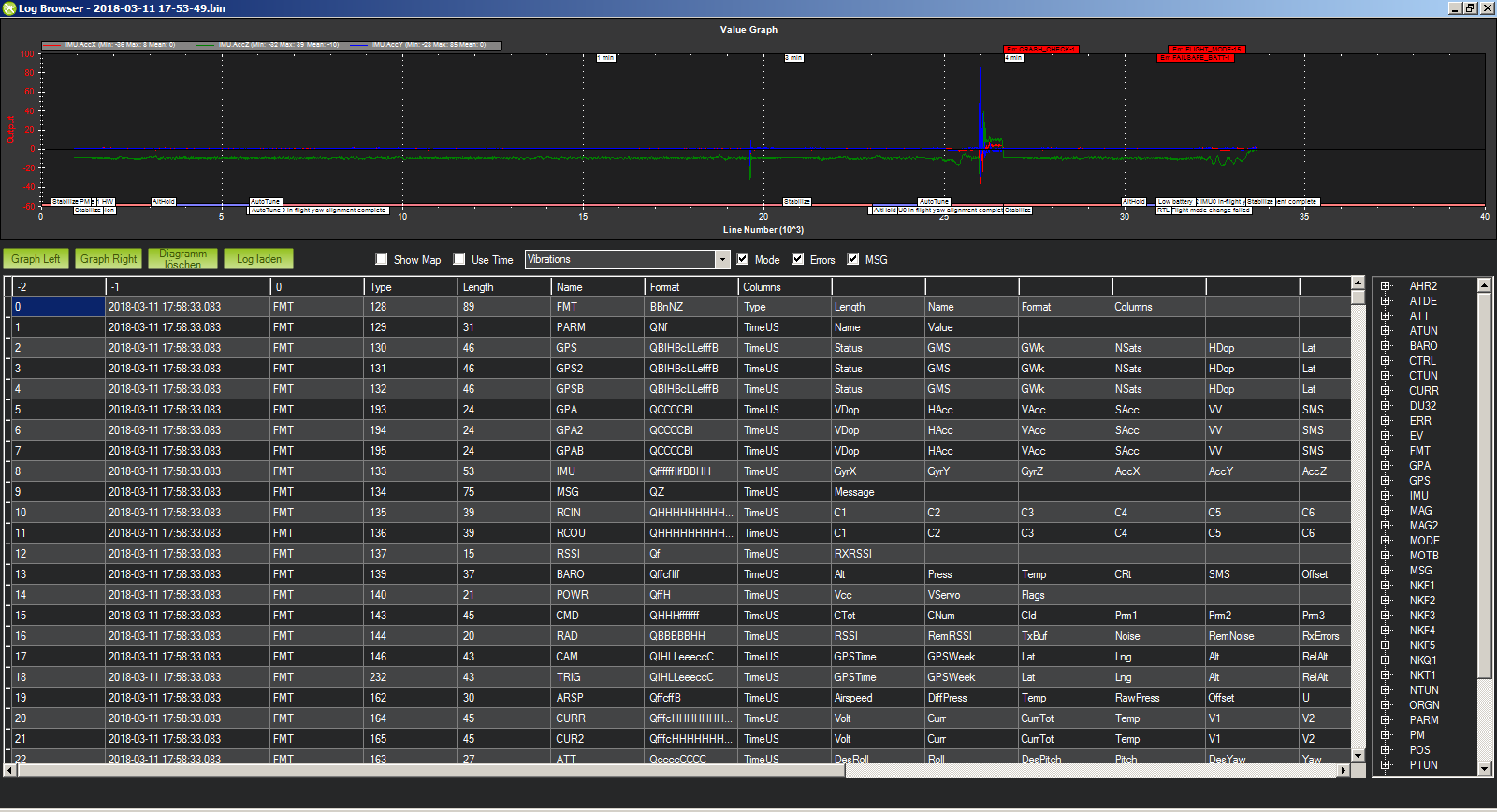
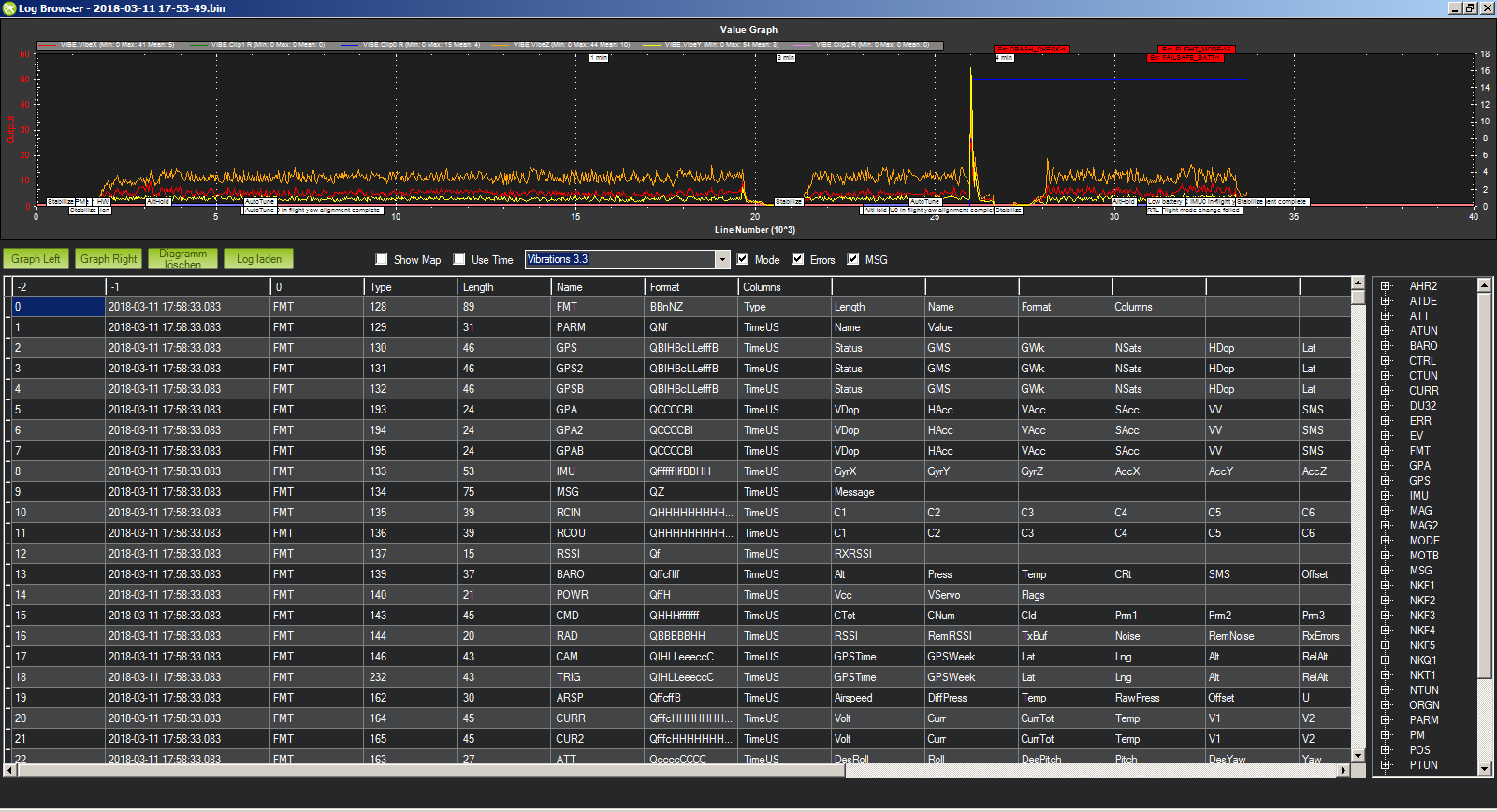
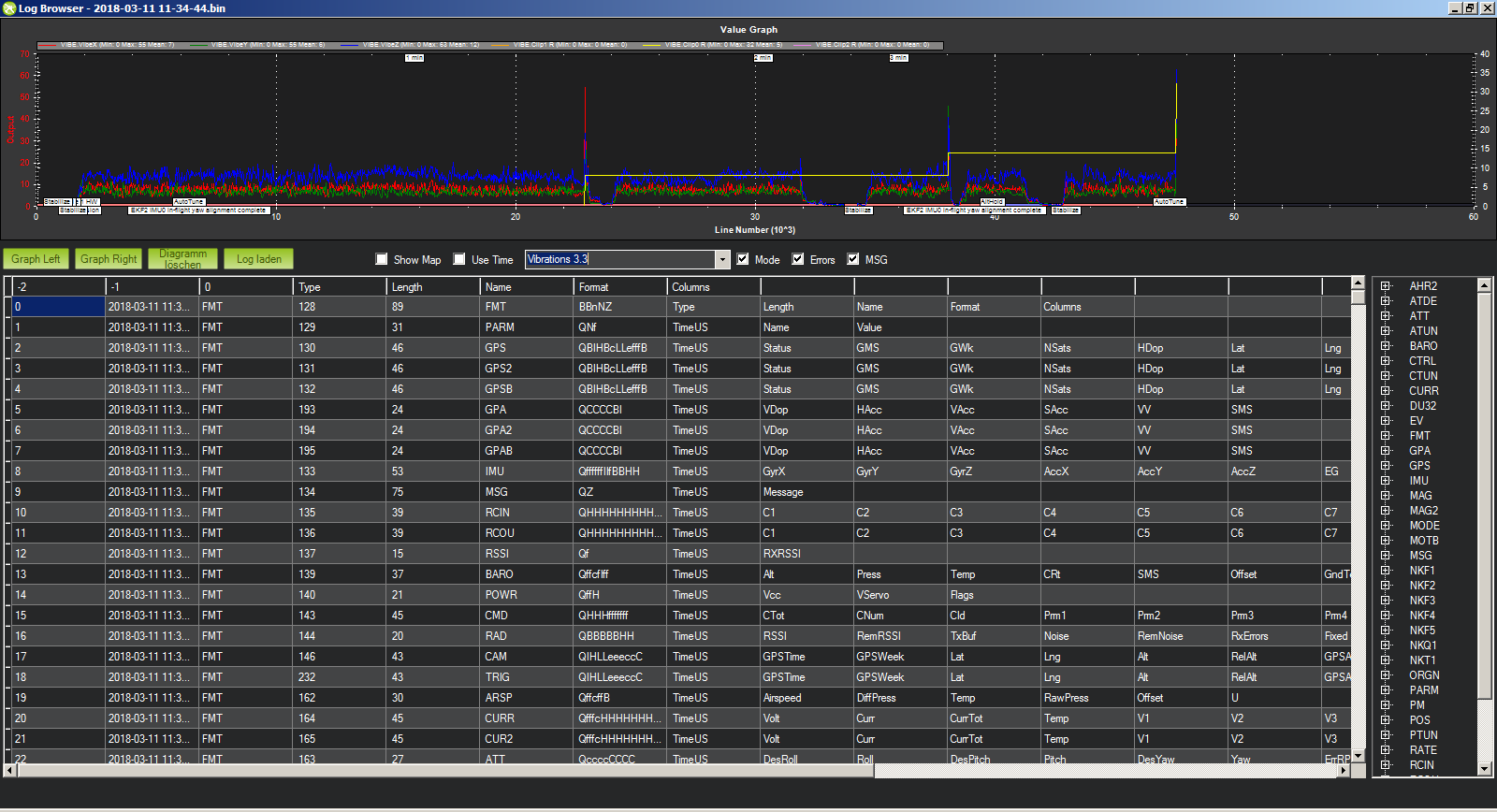
I’ve done some research and read about esc sync failures and crashs, caused by vibrations.
So for now i’m waiting for a new frame (last autotune attempt was followed by a very hard crash), i’m thinking about the problem and how to avoid throw out even more money  )
)
Are my ESCs the reason (they cost about 30 or 40 € on amazon), and if so, which are the recommended ESCs?
Were it just the Vibrations (Flightcontroller was mounted on antivibration board, the one with the blue rubbers), and if so…how to get rid of these vibrations?
Or is it a combination of everything (bad vibrations, bad motors, bad ESCs)?
I would appriciate any help or suggestions, what I can do.
I will try it again (when my new frame arrived) and take a look at the logs. But maybe you can give me a hint, before any missleading autotune attempts, whether I choosed some really bad parts or did another mistake.
Thank you