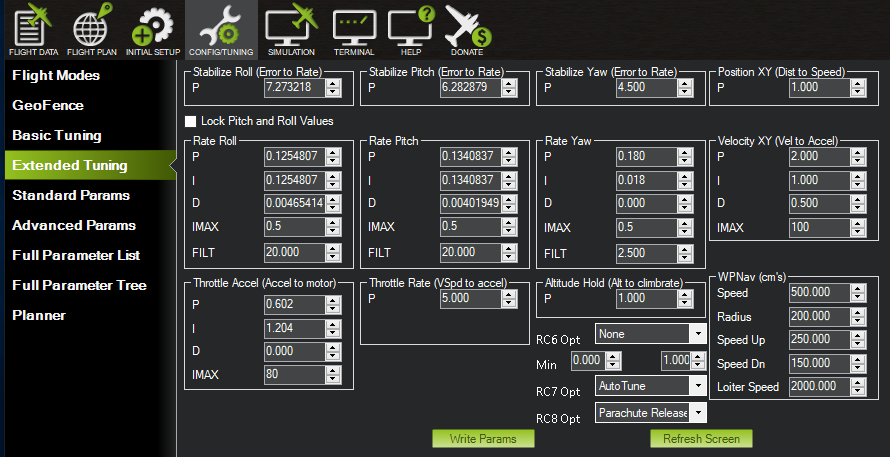
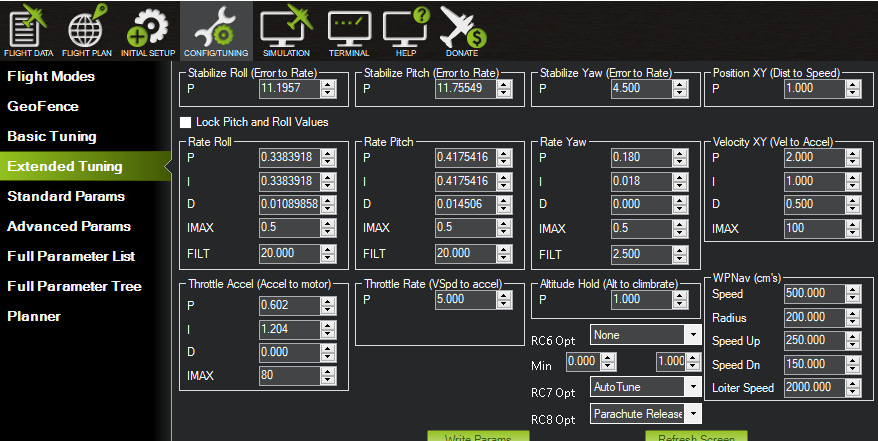
today after upgrading my copter motors from 2212 930KV to 2213 920KV i ran autotune but PIDs are very different than my last motors
now my config is :
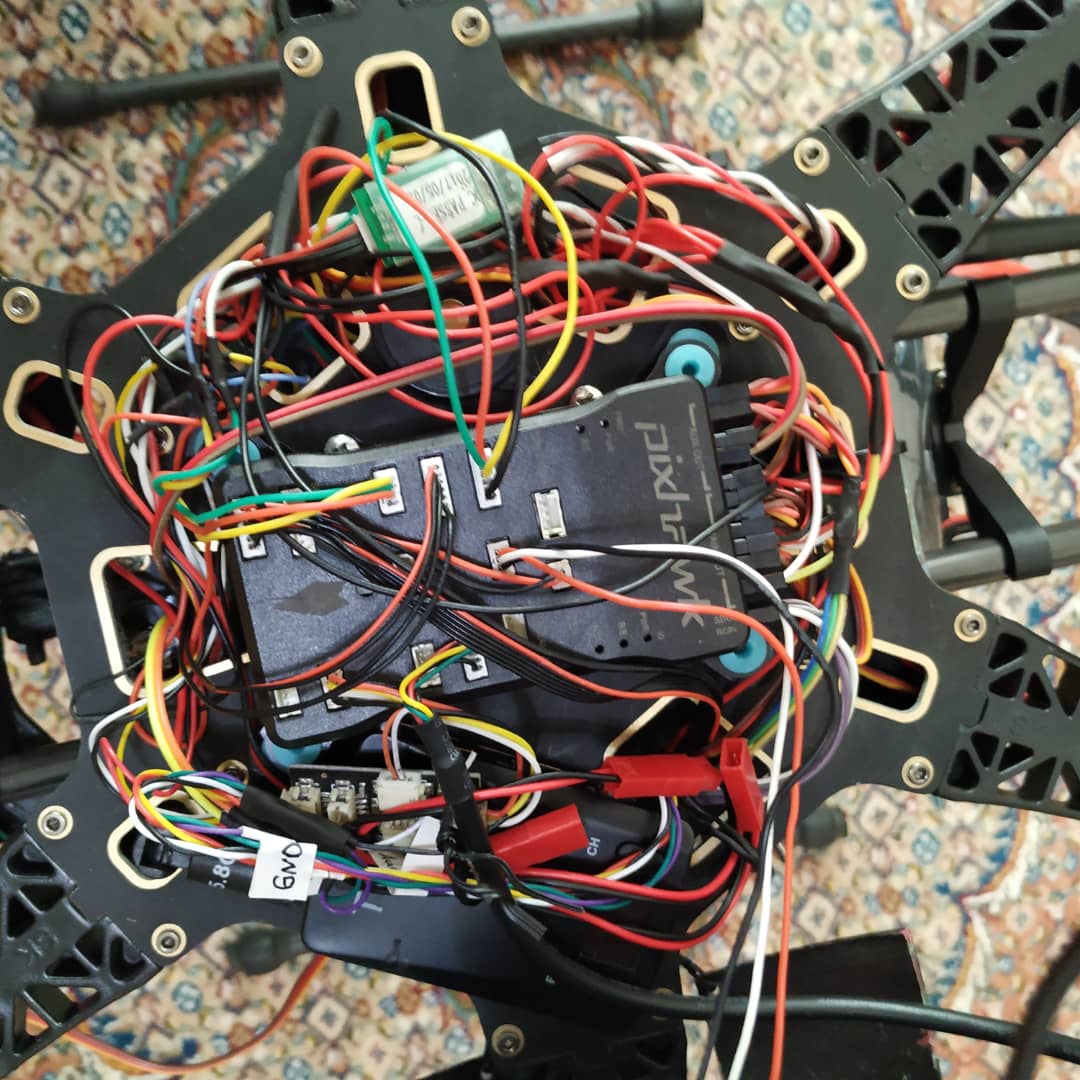
CUAV Pixhawk with Arducopter 3.6.10 on ChibiOS
tarot S550 frame
Air Gear 350 2213 920KV
T9545-A propellers
30A HobbyWing ESCs
10A Tattu battery
today i tested copter in stabilize and after changing ATC_THR_MIX_MAN many time i found that its fly better at 0.5
but problem is another thing copter is shaking a little bit on forward and backward in loiter mode
do i need reduce PID values of pitch ?
ok i got it
it seems that tune is stable because today my copter flies great in the wind (about 20KM/h) with both stabilize and loiter
also i think shaking could because of wind
ok tomorrow wind will stop and after tuning yaw i will send log for a better analysis
ok now tuning all axis has been finished and i did a fly in loiter and stabilize in a clam day
first i want to say thank you for a great tuning instruction my hexacopter fly well in stabilize without any problem
but i still have shaking problem in loiter
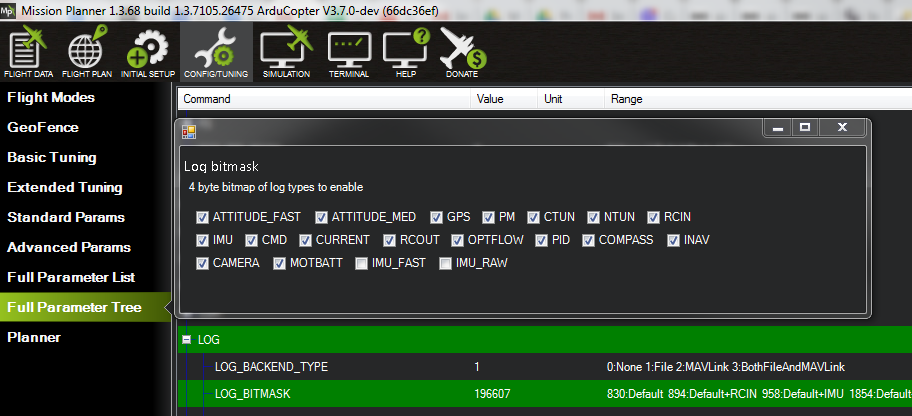
here is log file
what is your idea ?
I am disappointed that I wasted so much time trying to work out what was wrong when you had not taken the time to listen to my advice and read the instructions in the first place.
MOT_THST_EXPO - 0.55 for 5 inch props, 0.65 for 10 inch props, 0.75 for 20 inch props. This parameter should be derived by thrust stand measurements for best results (don’t trust manufacturer data).
Motors setup
Parameters used to define the output range sent to the ESC.
MOT_PWM_MAX - Check ESC manual for fixed range or 2000us
MOT_PWM_MIN - Check ESC manual for fixed range or 1000us
@Leonardthall
ok now i finished tuning and auto tune
copter is flying well at stabilize and i have no any shaking problem at all in this mode so i didnt change input shaping parameters
but it seems that still i have shaking problem on forward move with loiter when i apply small (5 to 10 degrees) control input into roll , with bigger degrees i have no problem