I am in the process of building a 32" quadcopter. I have already done the initial tuning process, then a manual PID tuning, and finally I configured the harmonic notch filter. After this the quad was already able to fly and navigate on its own, not in the best or most accurate way but in my opinion well enough to be able to proceed with the AutoTune. For this first attempt to perform the autotune I configured the parameter AUTOTUNE_AGGR = 0.05, so that the process would not be too aggressive and could end in a crash. After about 20 minutes the process was successfully completed.
The first indication that maybe something was wrong was when I landed and the autotune parameters were saved, after that a PreArm error started to appear.
To get this PreArm error to clear I had to lower the ACRO_BAL_ROLL/PITCH values from 1 to 0.6.
Next I rebooted the flight controller and took a look at the new PIDs values. At first glance I found them to be very strange, P gains that in my opinion seemed very low and a brutal difference between the Pitch and Roll values, although the frame and the mass distribution is quite symmetrical.
Here is a picture of the PID values before and after AutoTune.

PIDs values pre AutoTune.
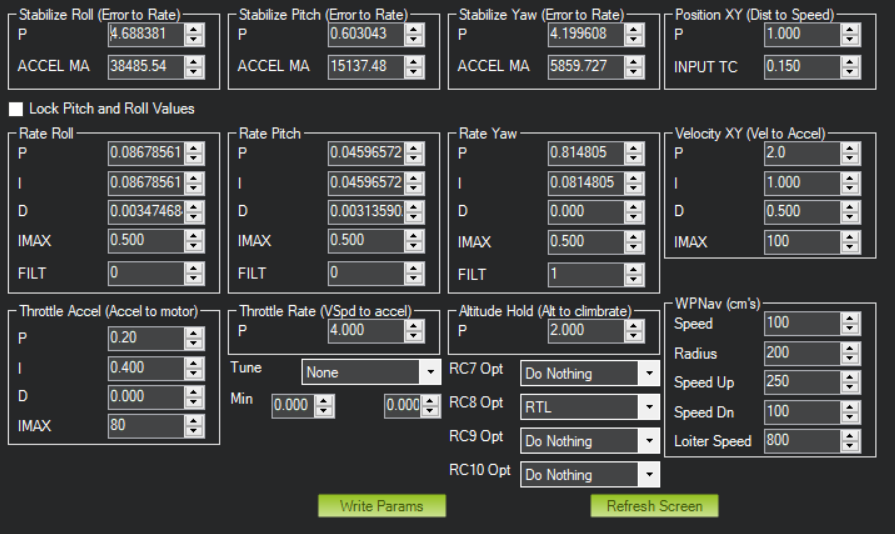
PIDs values post AutoTune.
Despite this I tried flying once again with these values. Just after takeoff the drone tip over an crash.
Any recommendations on how to proceed with the tuning of the drone? Any feedback on the PID values resulting from AutoTune? Could someone confirm that they are too low as I think they are? Should I try to make an autotune with a higher value in AUTOTUNE_AGGR, in order to try to obtain higher gains?
I add below some extra details about the drone and I attach the LOGs .bin corresponding to the flight before the AutoTune, the flight of the AutoTune and finally the flight after the AutoTune in which the crash occurred.
I would really appreciate any feedback on the subject.
Hardaware Specifications:
-
Battery: 12S - 34Ah
-
Motors: 100kv
-
Propellers: 32"
-
Total weight: 17kg
-
FC: Cube Orange
-
AC version: ArduCopter V4.0.7
LOGs: https://drive.google.com/drive/folders/12Xuvm-OGdEj-W3KmyOLHAfsQG-pTV-4F?usp=sharing