These are two autotune logs:
-First log: using a weak but still usable battery.
-Second log: using a fully charged good battery.
After first, I disarmed with Autotune on (ch7 switch), so for second should be used the modified parameters on first.
Both autotunes were done on AltHold around 3m high (under sonars range). First autotune with first battery (weak) was normal, but a few seconds after starting second autotune with second battery (good) it suddenly started climbing towards selenites.
Hexacopter F550, 10" propellers, 4S, a bit overpowered (without camera and gimbal):
Frame: HEXA
RCOut: PWM:1-8
fmuv3 002F0046 32385108 38383435
ChibiOS: d4fce84e
ArduCopter V4.0.3 (ffd08628)
Frame: HEXA
RCOut: PWM:1-8
fmuv3 002F0046 32385108 38383435
ChibiOS: d4fce84e
ArduCopter V4.0.3 (ffd08628)
First battery (weak) voltage drop was more than 1V during autotune:
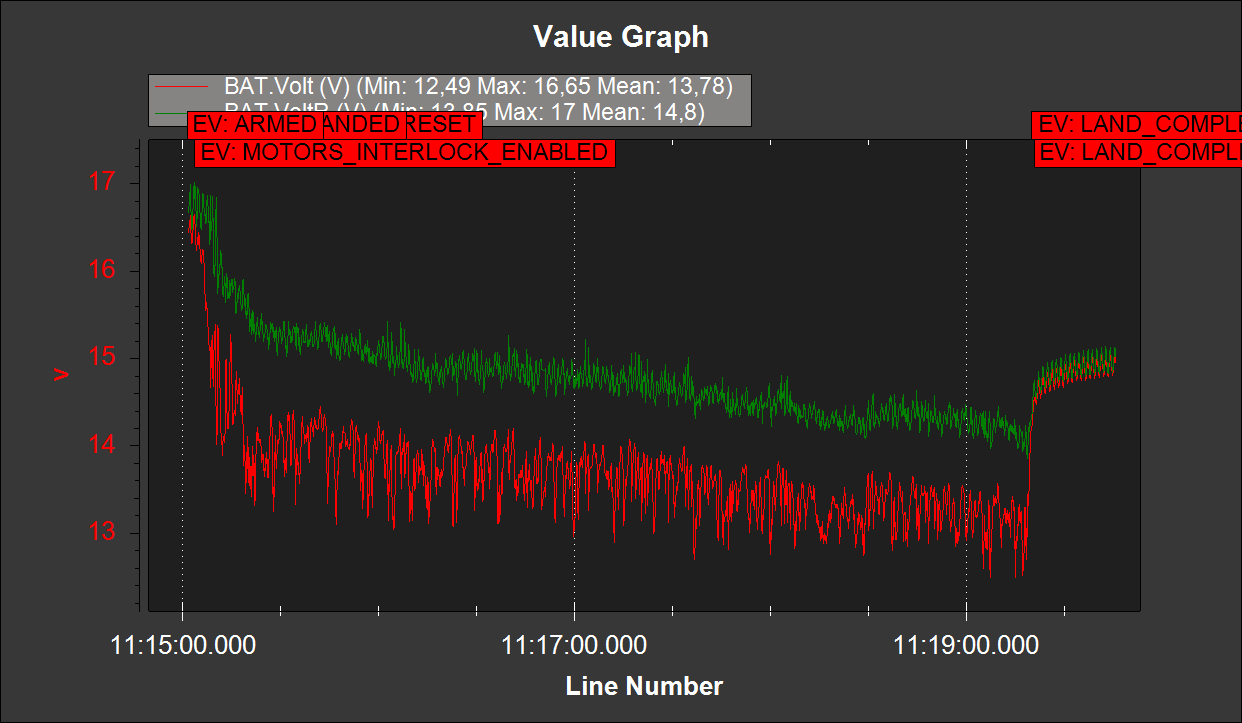
but on the second autotune second battery voltage voltage was higher and voltage drop was less:
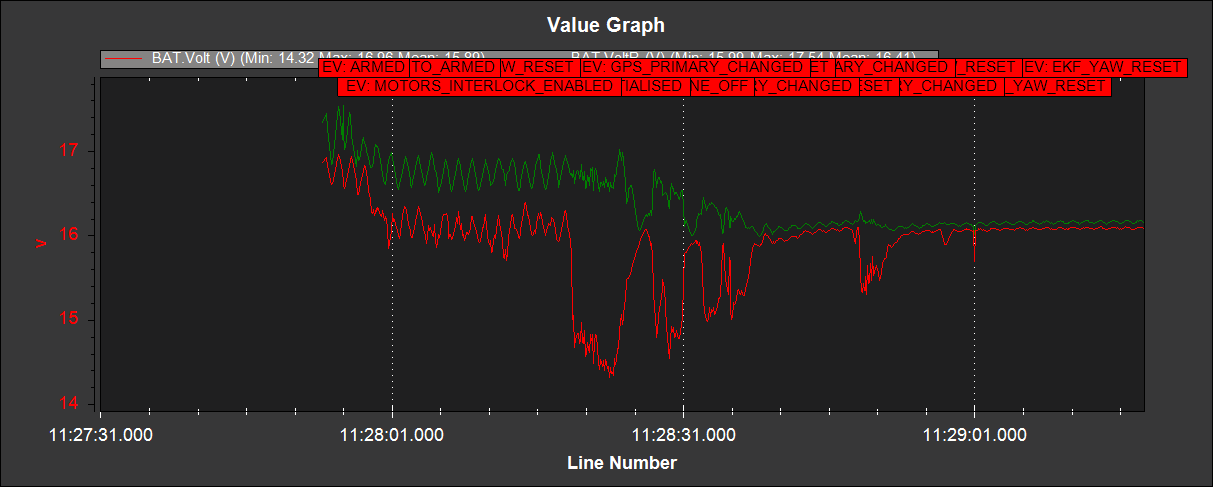
Battery voltage compensation was active on both autotunes:
MOT_BAT_VOLT_MAX,16.94
MOT_BAT_VOLT_MIN,13.5
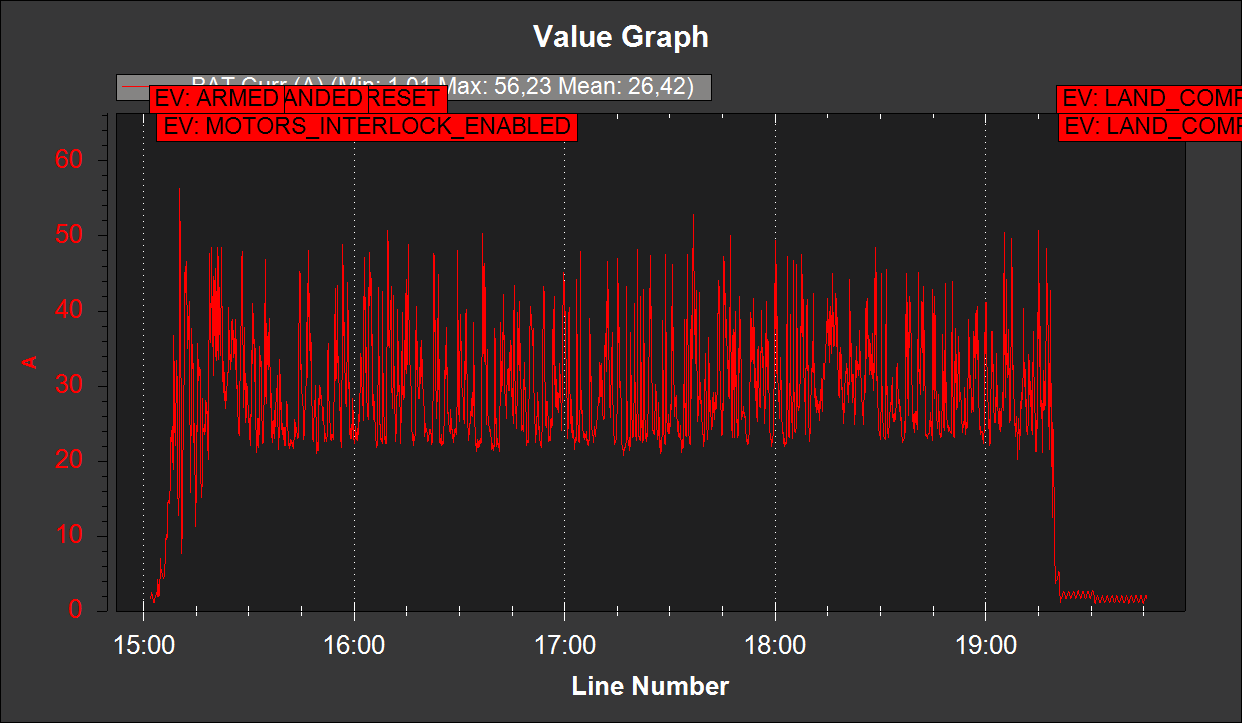
There was also a battery current limit:
MOT_BAT_CURR_MAX,40
MOT_BAT_CURR_TC,3
During first autotune current was around 35A:
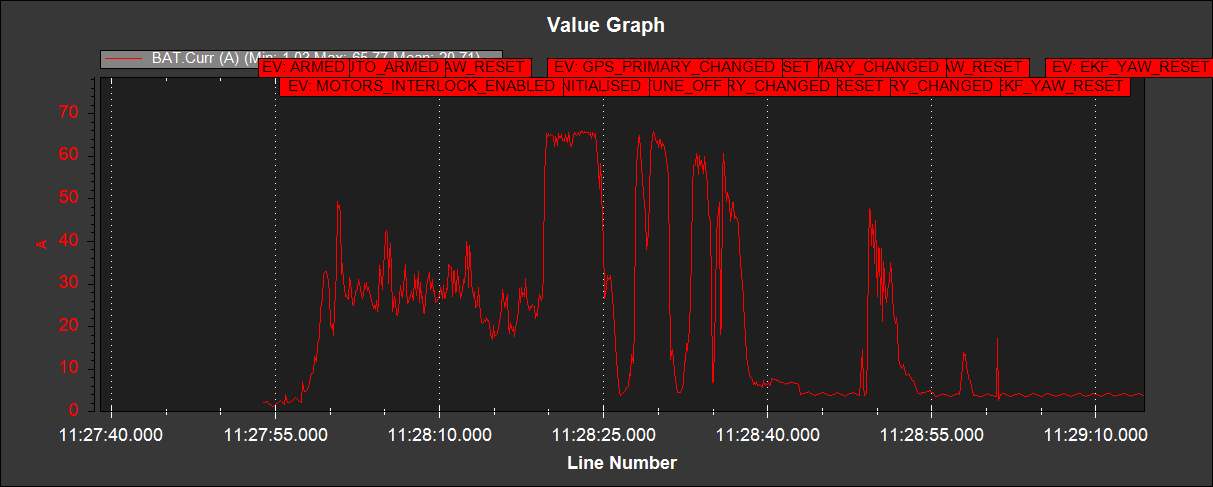
but current was much greater on second autotune while ascending:
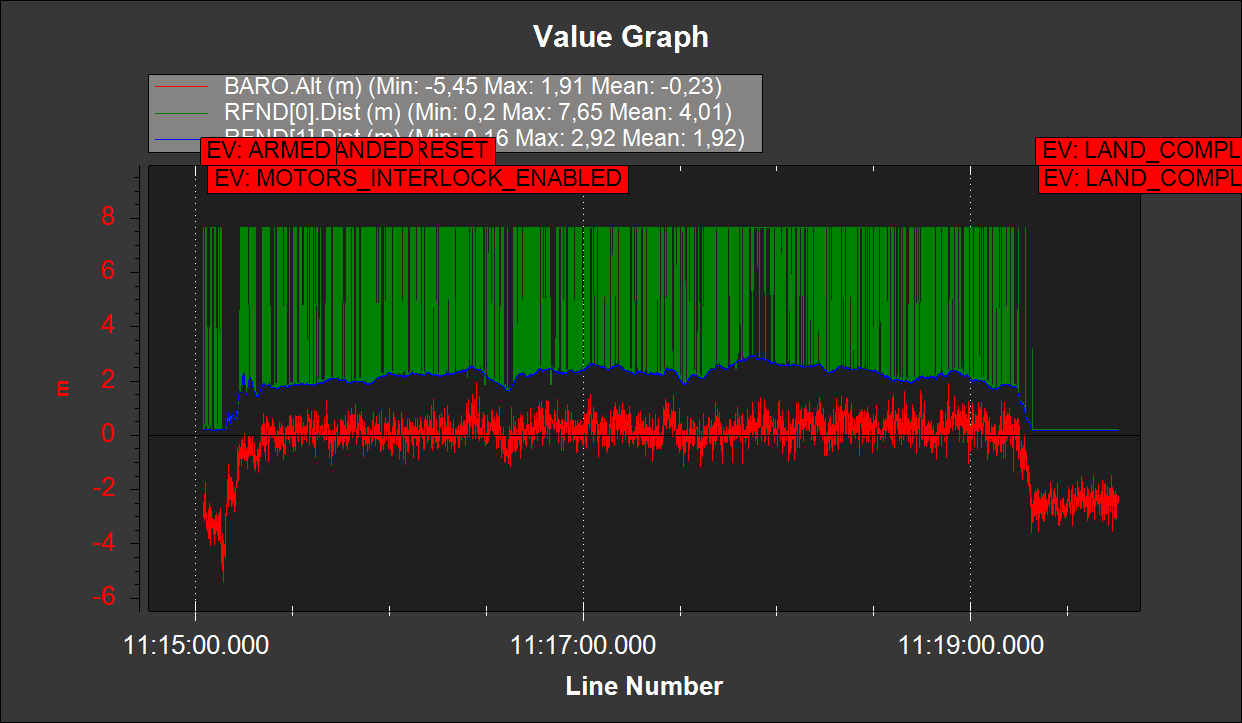
These are barometer and rangefinders altitudes for first autotune:
and these for the second:
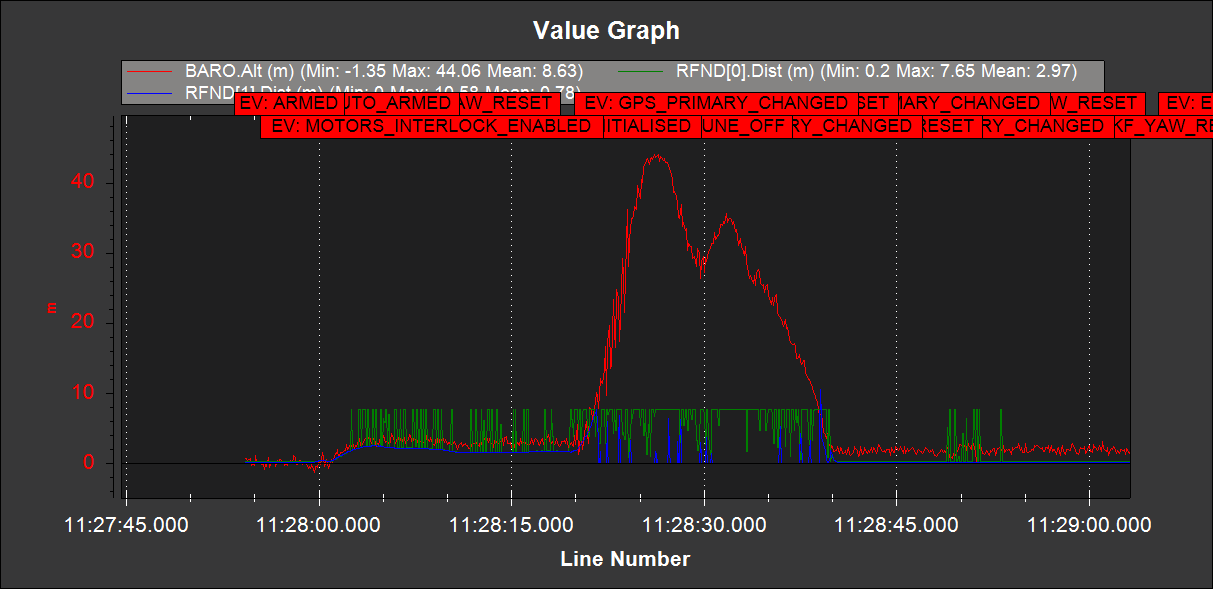
Spikes on rangefinders seem to appear always with bright sun and over dry yellow grass.
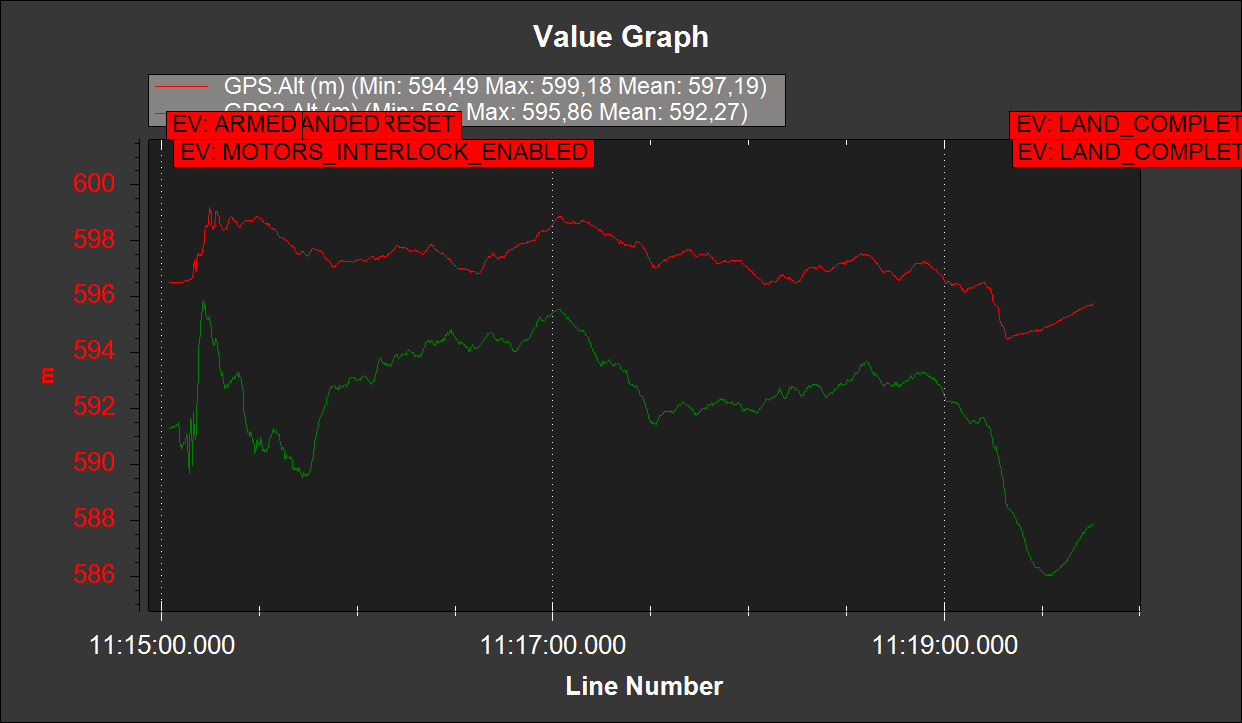
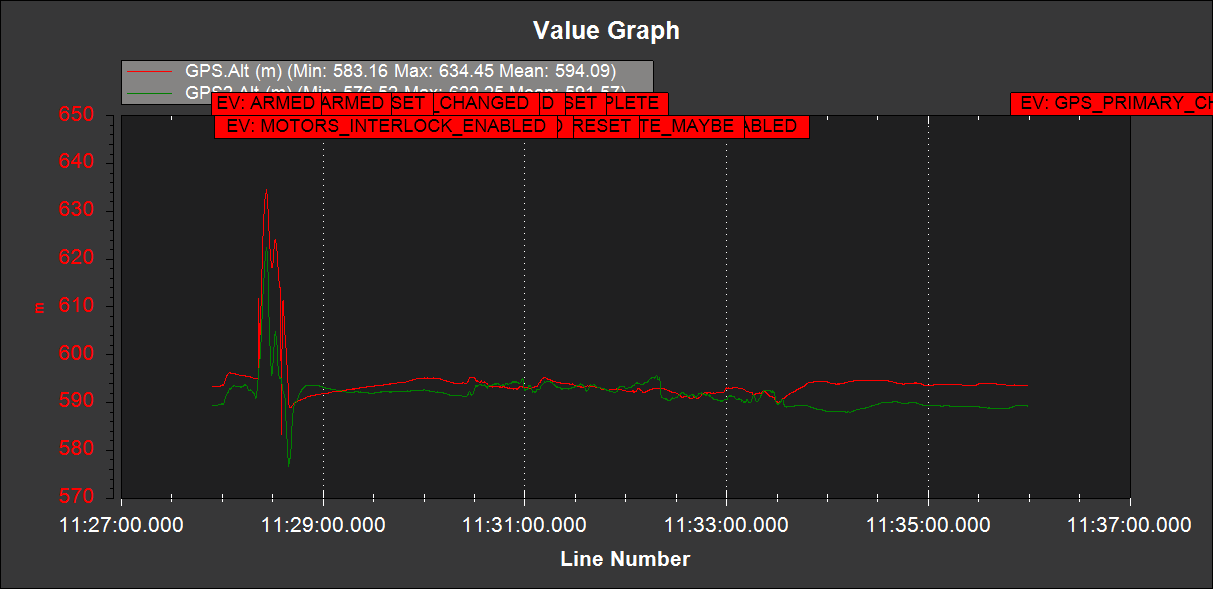
There are two GPS’s, giving similar altitudes.
First autotune:
Second autotune:
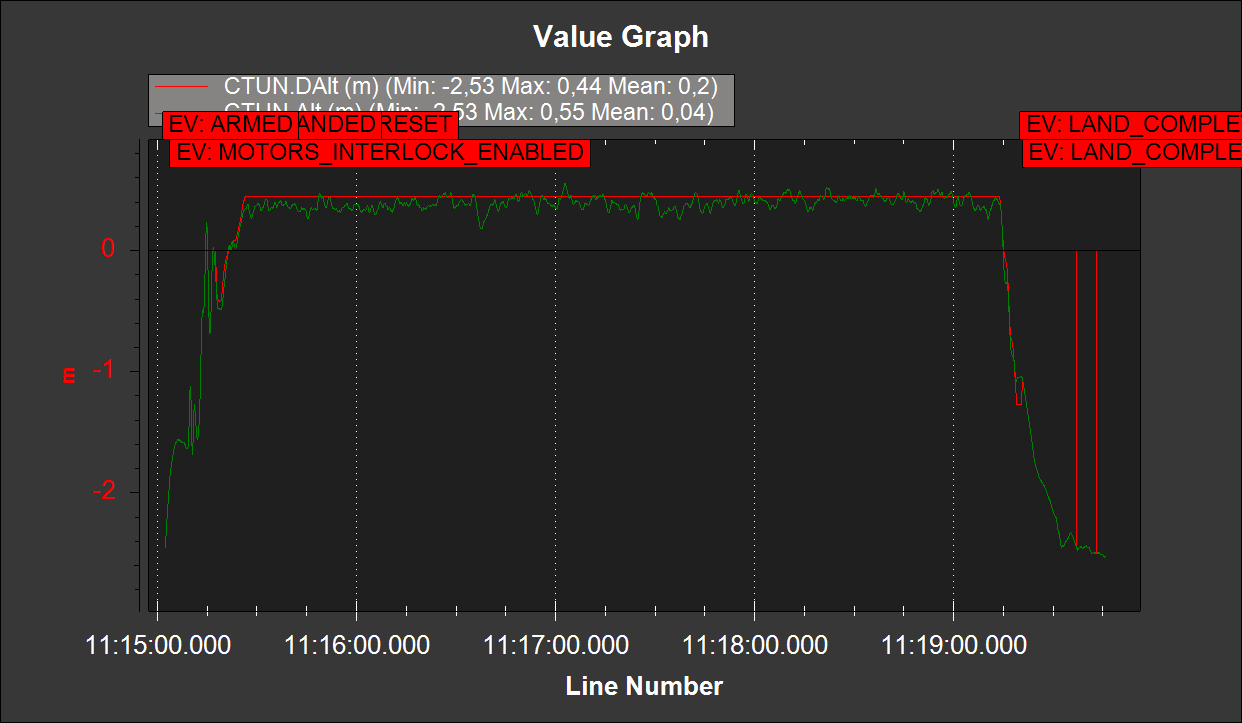
These are CTUN.Dalt and CTUN.Alt for first autotune:
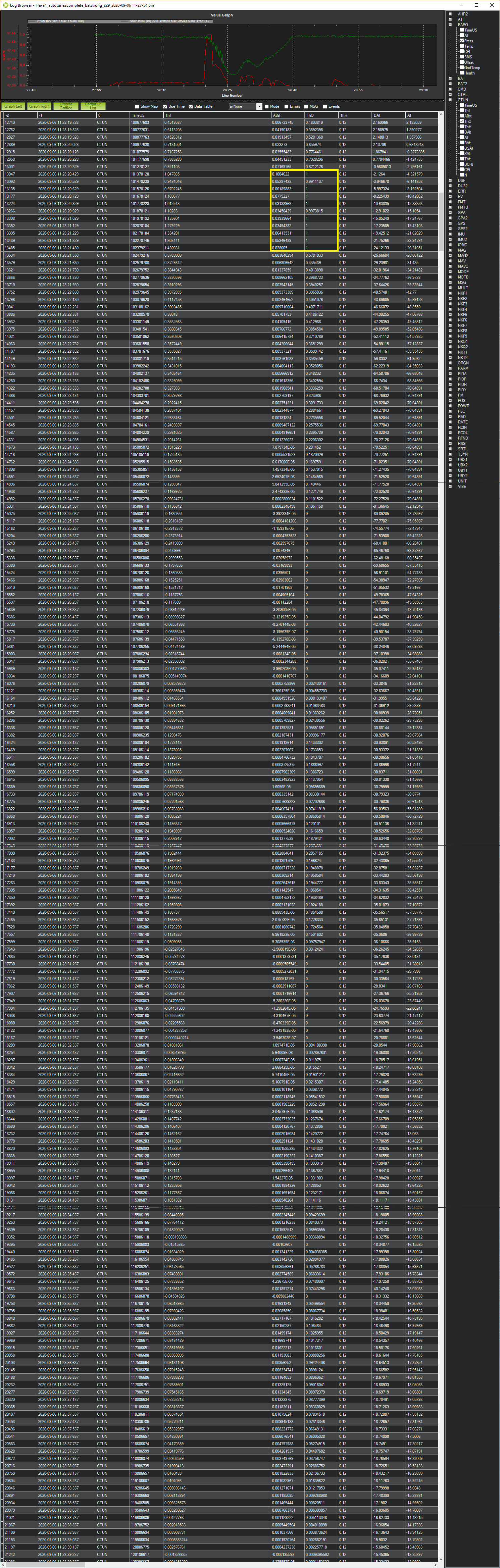
and these for second, very strange:
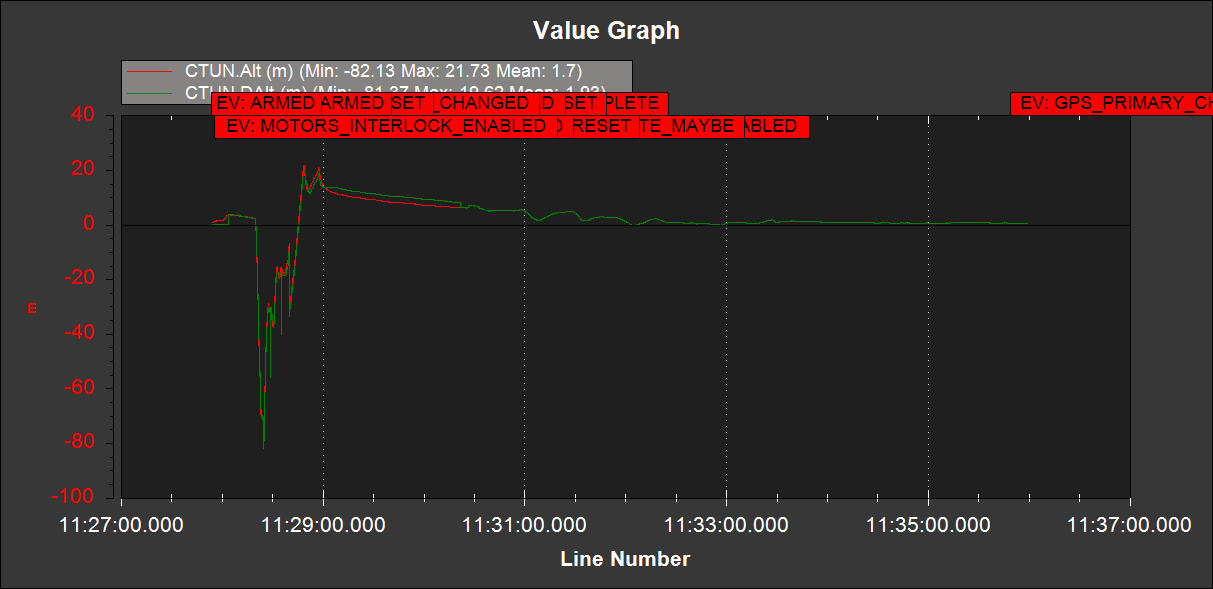
It could happen that if it “thinks” it is at -80m high it would climb immediately.
Unfortunately, there was an altitude fence, but it was disabled:
FENCE_ALT_MAX,10
FENCE_ENABLE,0
although if it “thinks” it is at -80m high perhaps would be useless.
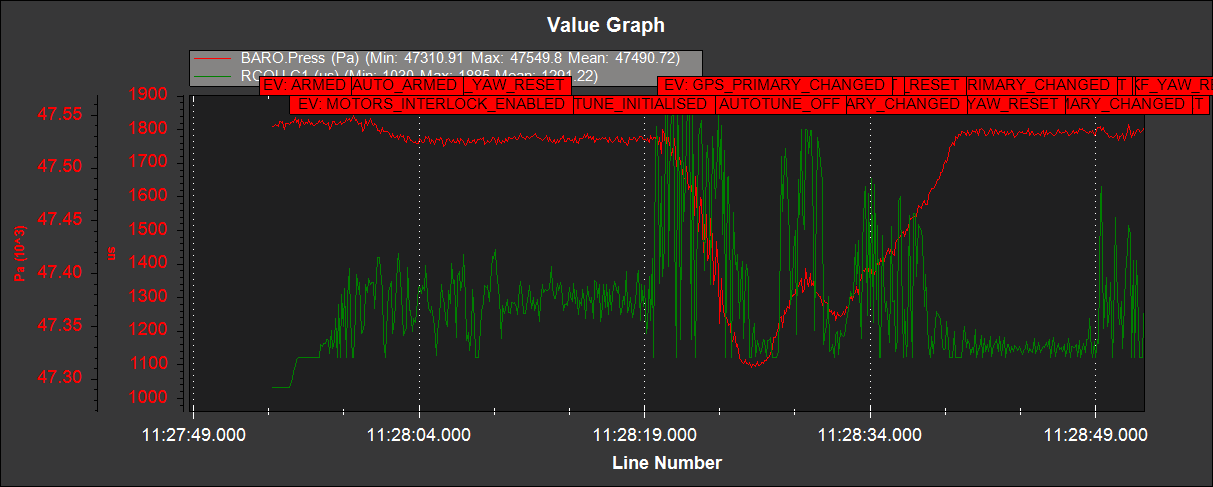
This is the pressure on the barometer for first autotune:
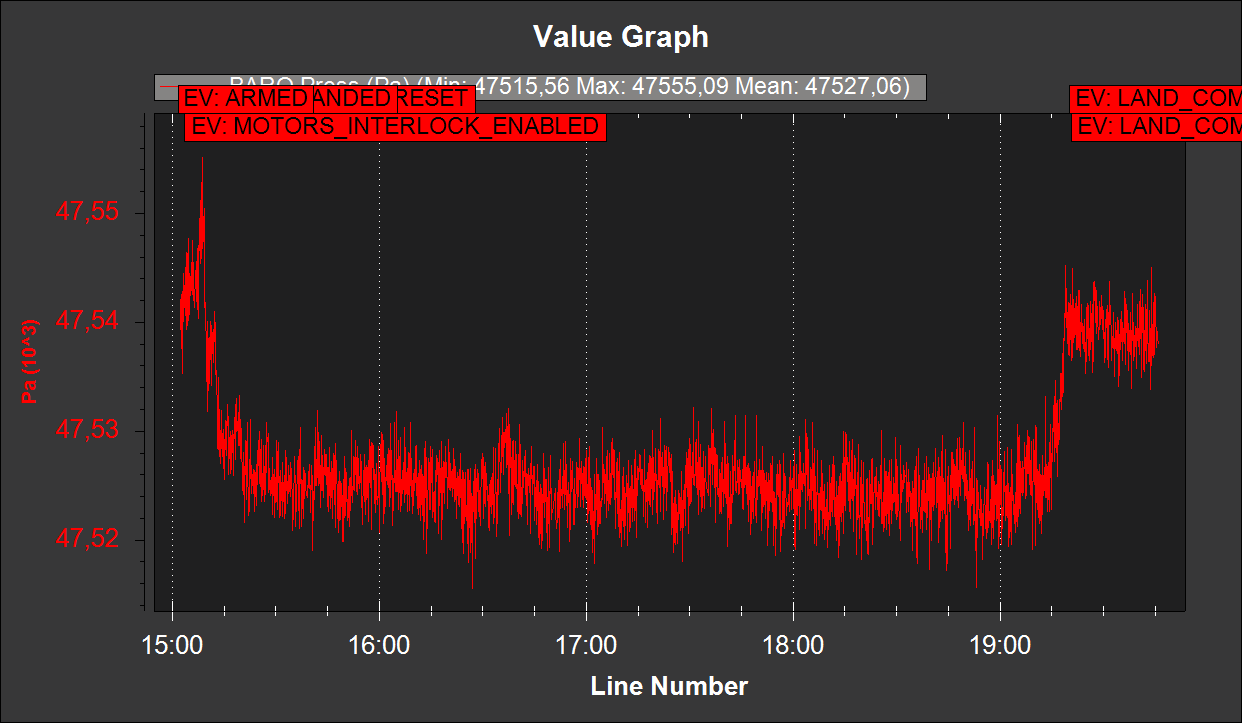
and this for second autotune (with output to first motor):
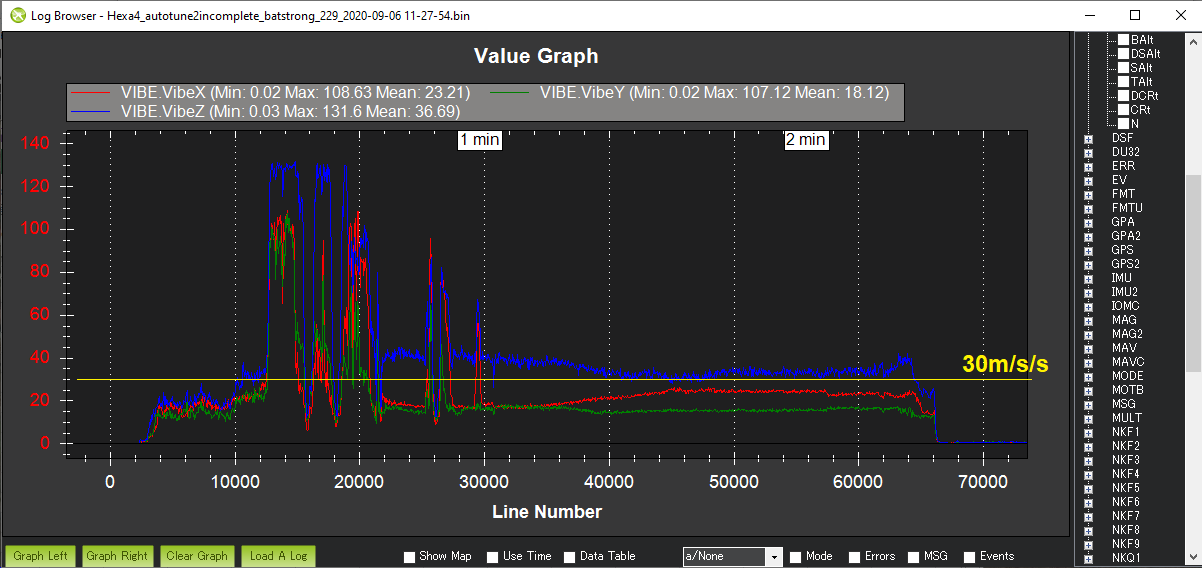
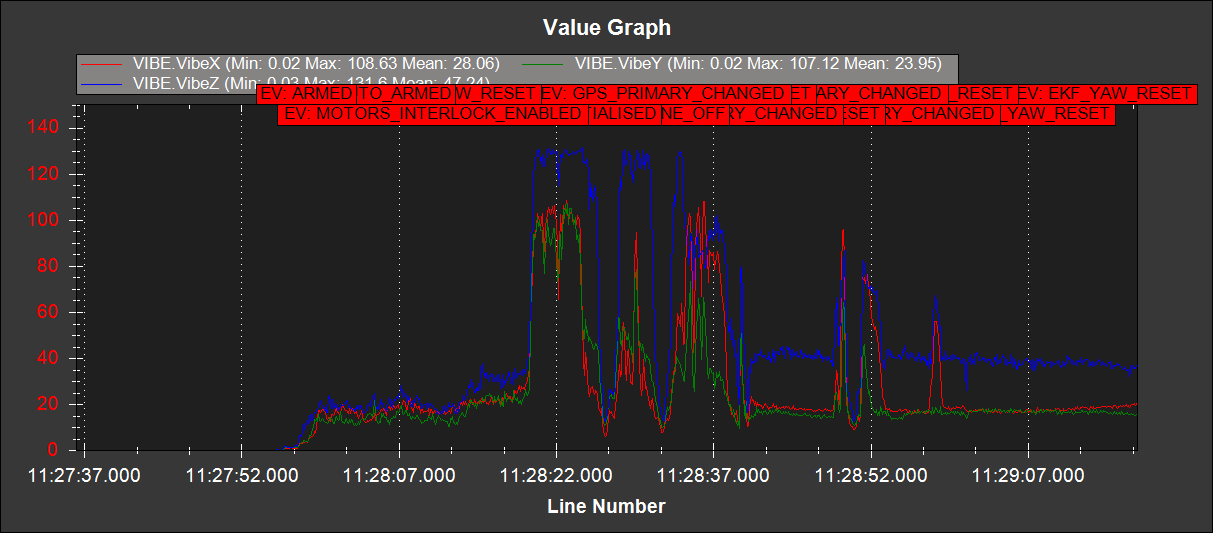
Vibration levels were moderate for first autotune:
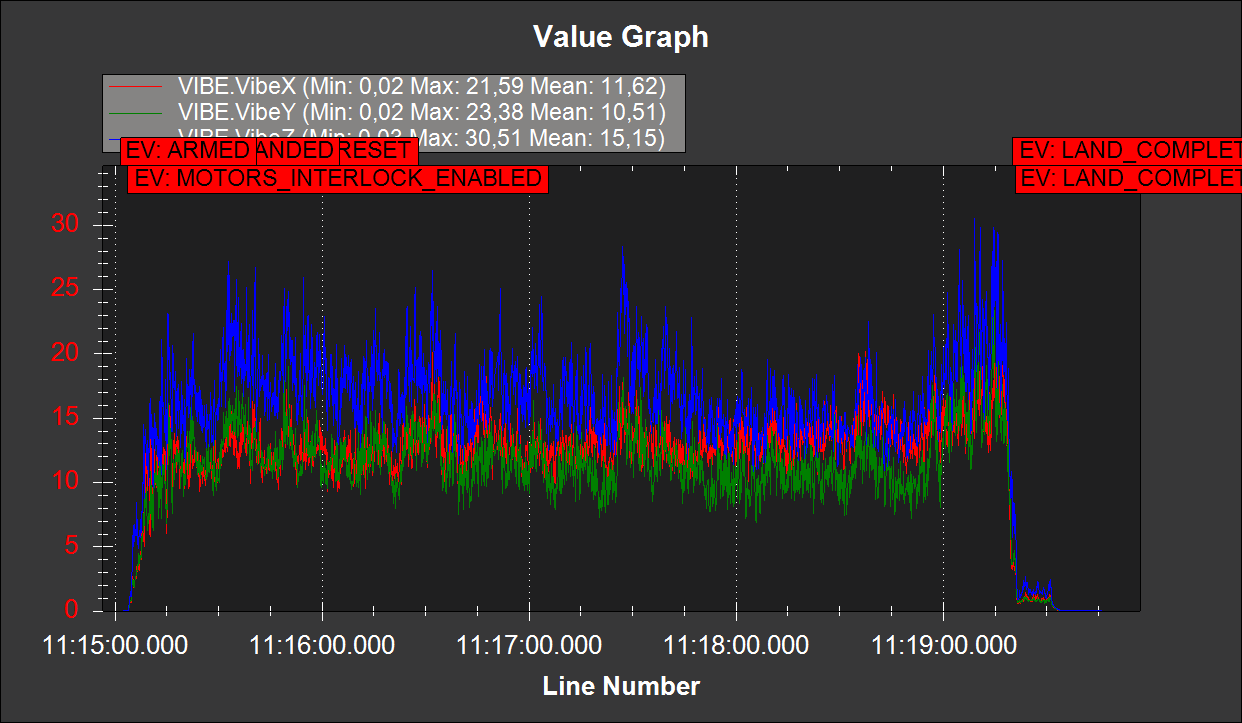
but suddenly exagerated (following 11 seconds of normal autotune) for second while climbing:
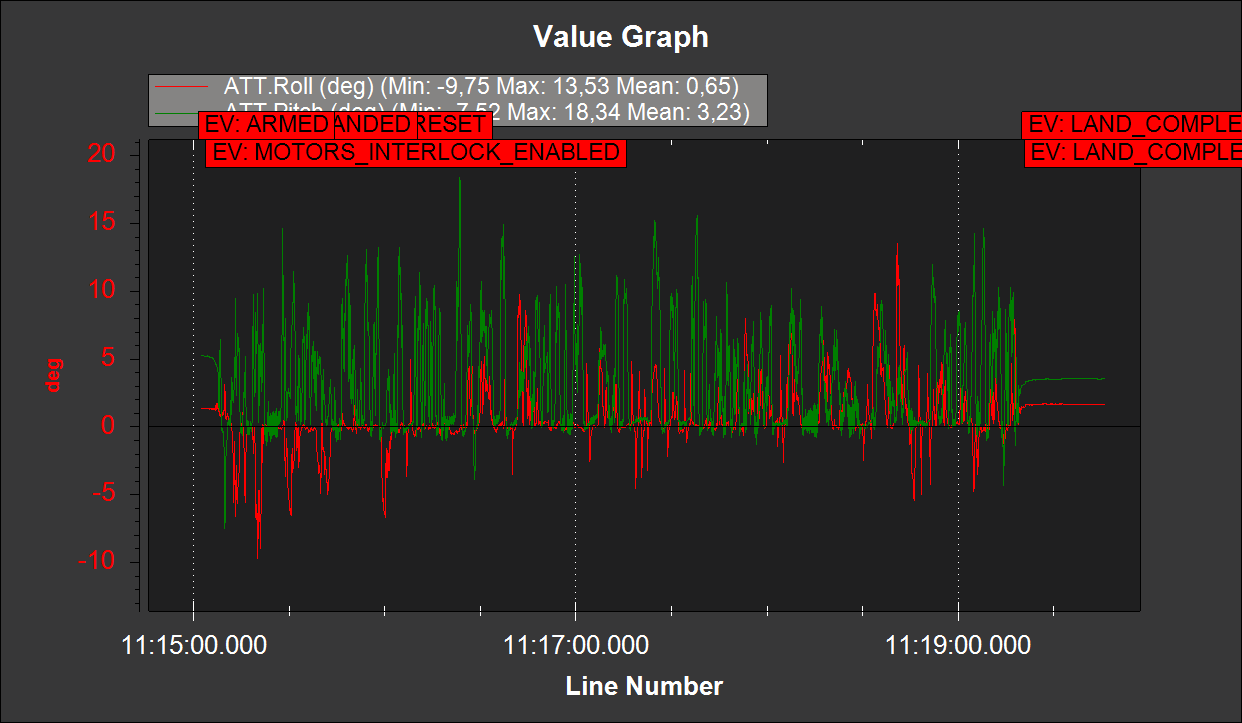
Roll and pitch were maintained on both autotunes (horizontal):
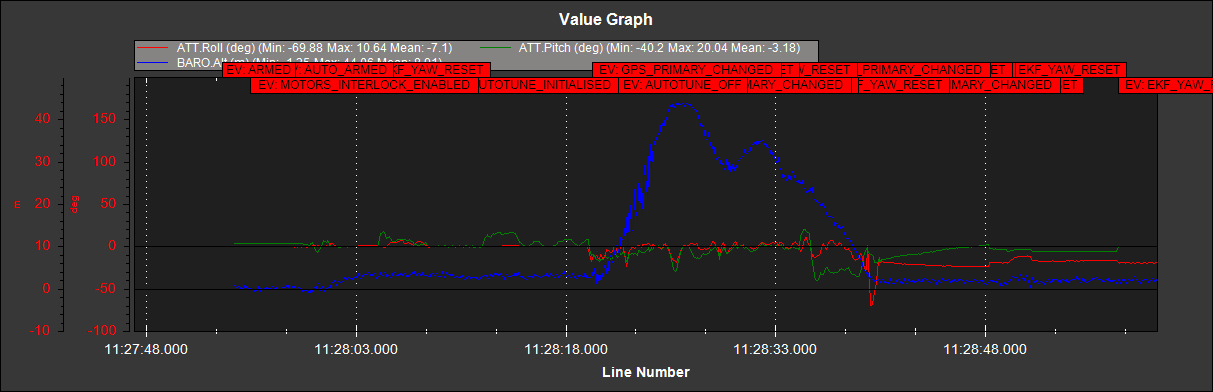
(On second, shown with BARO.Alt to show that it was horizontal during sudden climb)
So what really matters is knowing the initial cause for it to suddenly climb. I am not sure if second autotune higher battery voltage is a cause for it or a coincidence.
Others:
-Why CTUN.Dalt altitude suddenly appears 80m negative in second autotune?
-Why so high vibration levels on second autotune?
-Why 40A current limit not obeyed in second autotune?
Thanks for any help.