For first log:
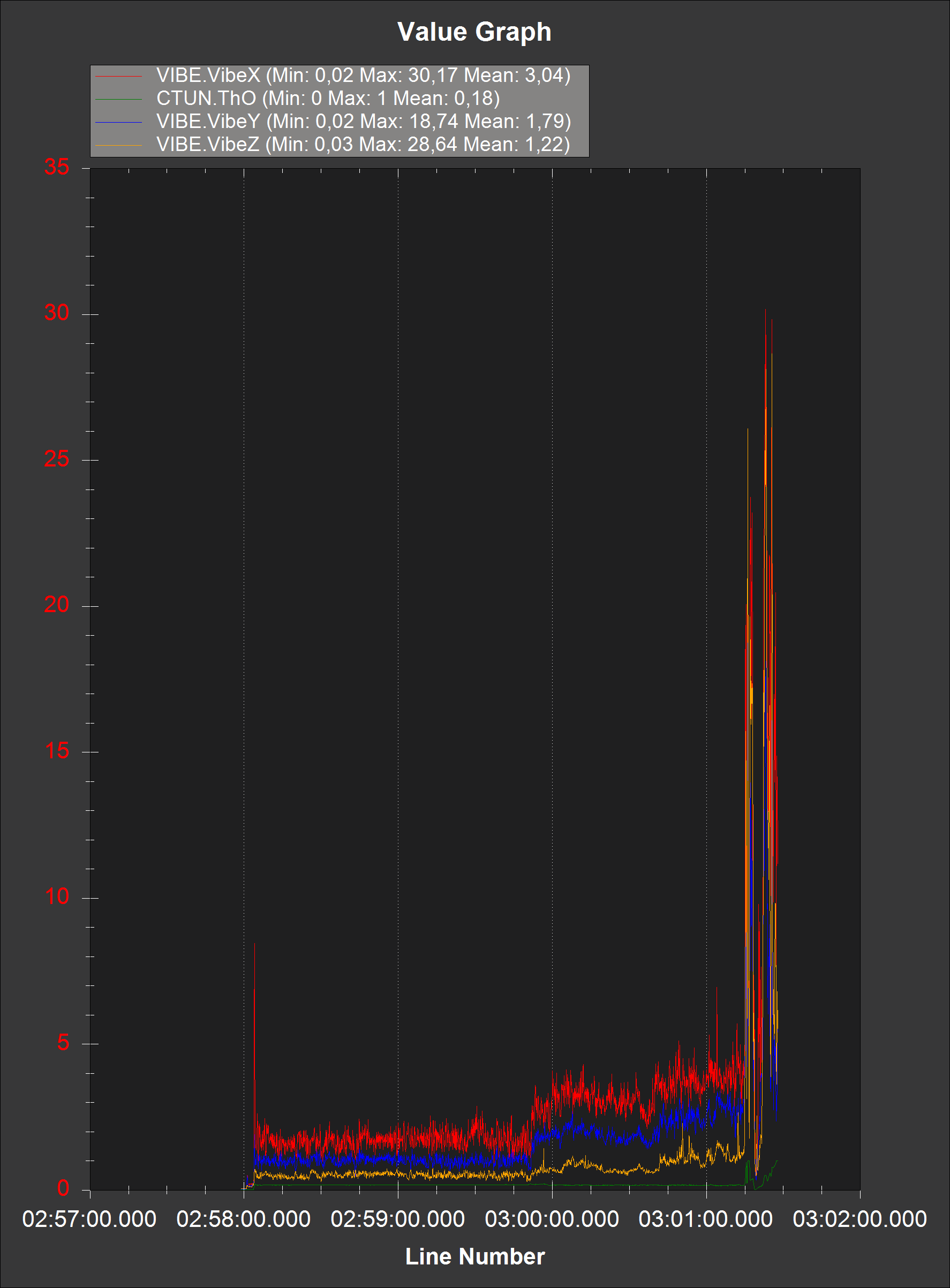
Yes, that is true, but after that vibration levels suddenly seem to increase and CTUN.ThO suddenly incrases from normal values, reaching 1 (green trace):
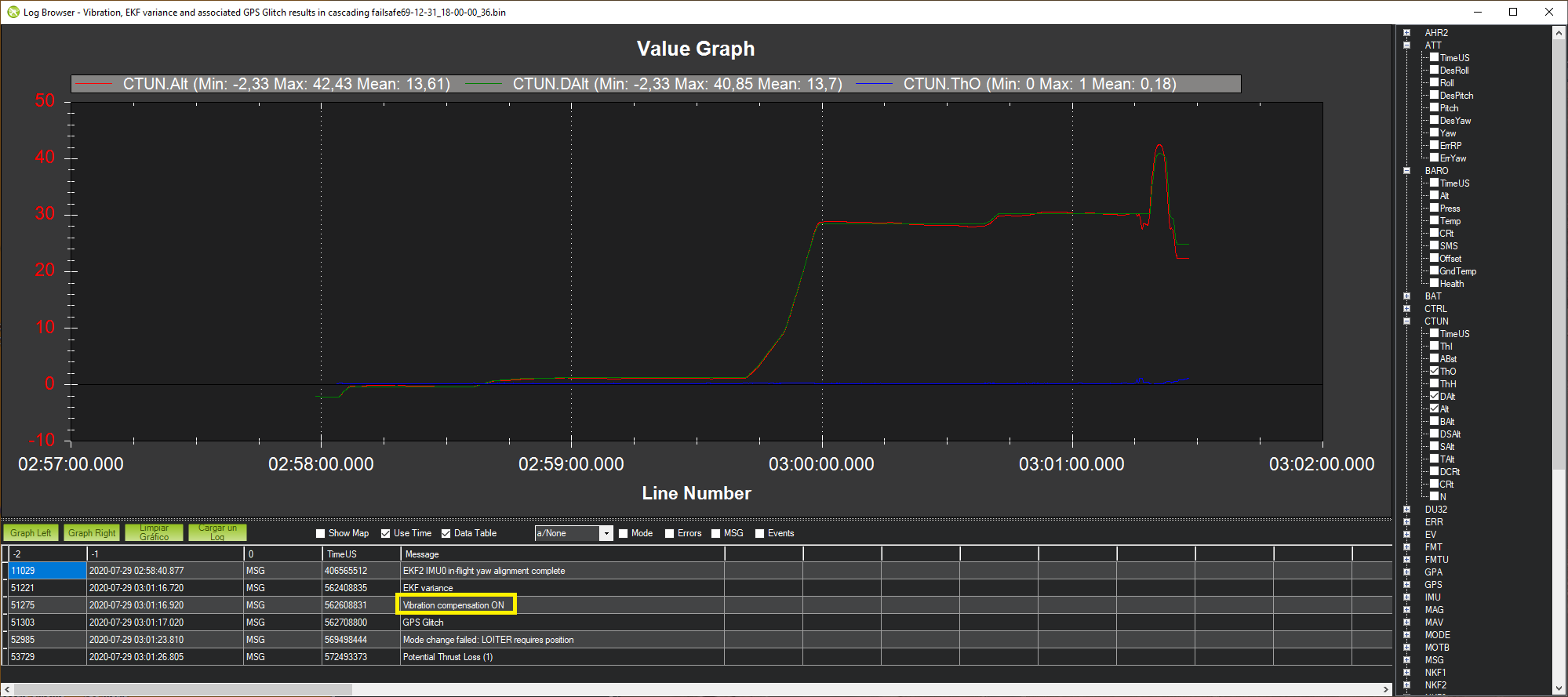
CTUN.ThO, Ctun.Alt and Ctun.DAlt show that you were at 30m high and it climbed, but probably you didn’t want to climb, so CTUN.Dalt is strange. You also have “Vibration compensation on”.
This capture (2142x4673) shows CTUN messages, showing exagerated values for CTUN.ThO:

Now have a look at
Autotune: hexa sudden climb 40m – CTUN.Dalt negative – DANGER
Very similar situation: 11s normal (autotune was on progress with a fully charged battery, but that may be a coincidence), and suddenly it went up.
During those 11s vibration levels were moderate, then seem to increase and copter is suddeny accelerated going up (CTUN.ThO=1 during one second).
On all replies the cause is high vibrations. Perhaps your case shows this is not clear.