Arming check only or also during flight?
Some similarities here:
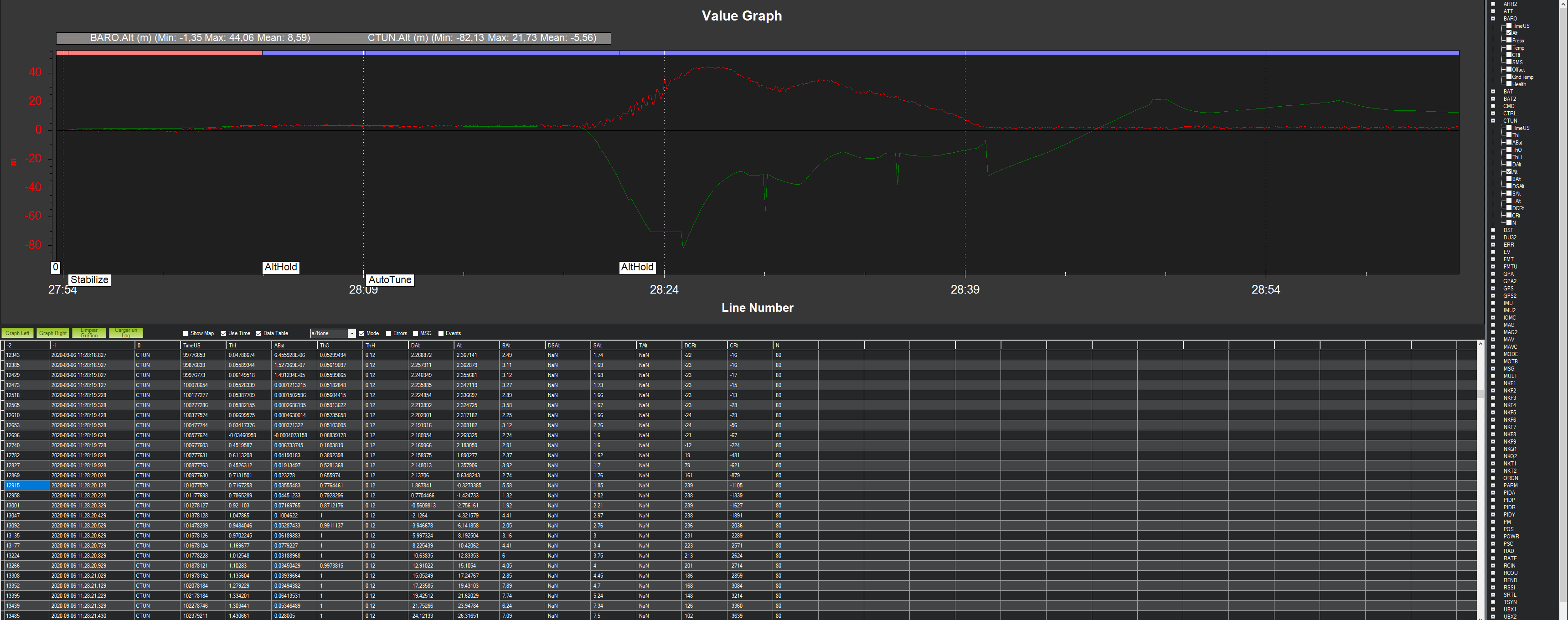

BARO.Alt and CTUN.Alt also very different (with CTUN.Dalt also negative BTW), and similar BARO.CRt/CTUN.CRt evolution.
There were vibrations, that increased suddenly with no apparent reason. Here there are no vibrations, but above graphs are similar.
Flight controller there was a chinese Pixhawk with no known problems. Hardware issue here?