I’m trying to do an autotune using Arducopter 4.1.5, one axis at a time, on my drone. It has a throttle-based notch filter set and initial params set from the MP wizard.
To be honest, the Pitch/DesPitch etc graphs are okay but all the same, I wanted to do a proper autotune having heard it gave the best results.
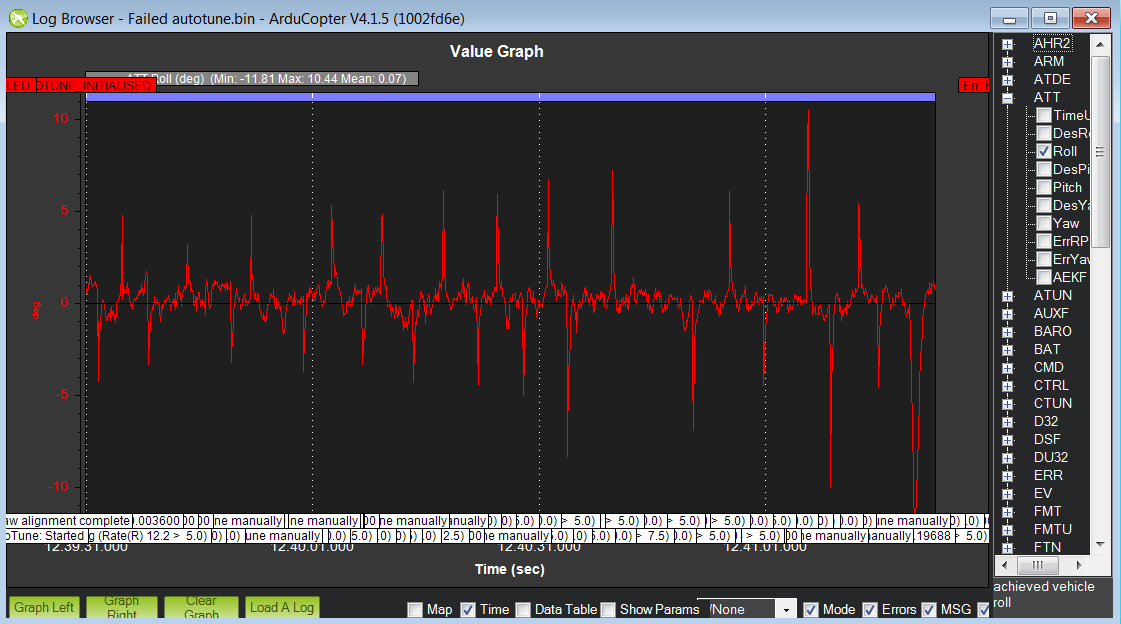
I took off in AltHold and switched to AutoTune, but now am getting the “AutoTune: failing to level, please tune manually” error message. I never saw this when I did AutoTune for all axes at once (I am not doing that because it takes too long and the batteries run out).
Download it first then use my username as the password.
Does anyone know why this is going wrong? I read just one other thread on here on the same issue but it provided no clues. In case it matters, I see that my drone is drifting a bit despite the wind being <5mph.
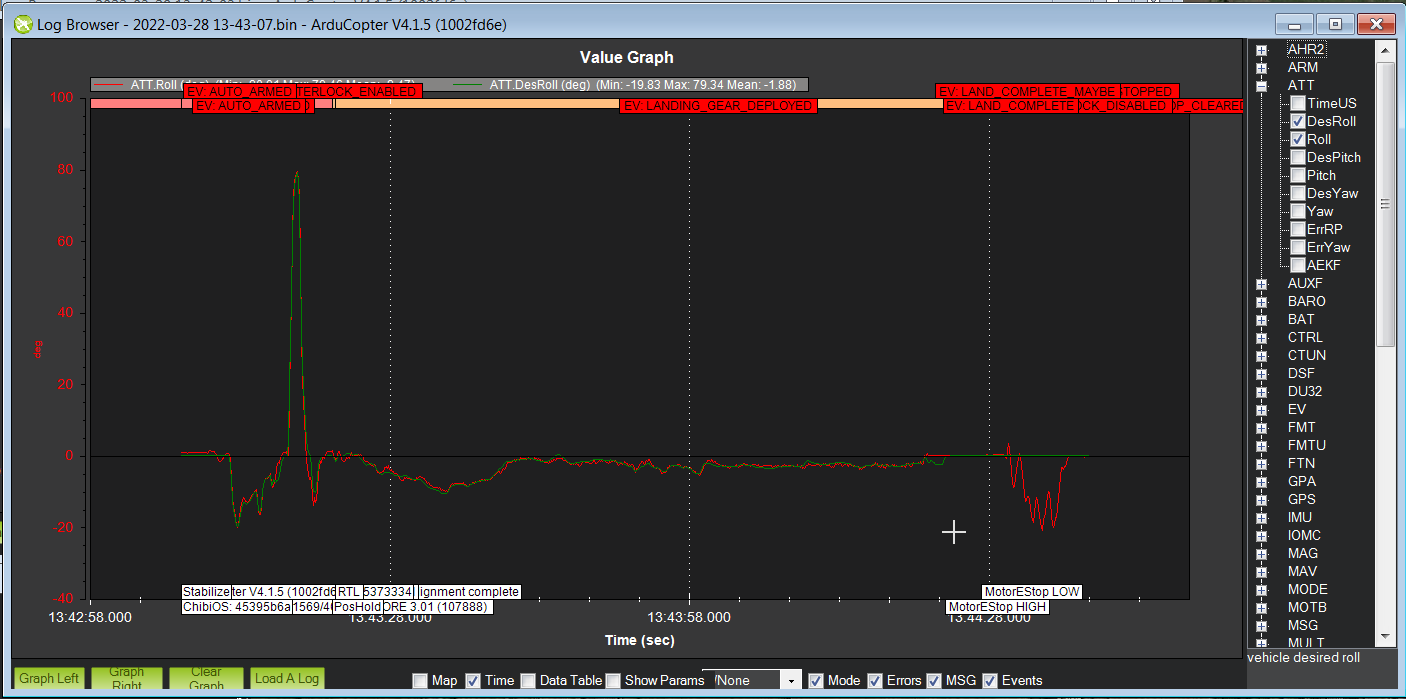
Thanks, I read the link and don’t see any overshoot while flying; I did some quite dramatic flying and there was no oscillation. e.g. flying full stick to the left with ANGLE_MAX at 80 degrees then releasing the stick. (This was a separate log/flight to the autotune one.) Please see graph below of the normal flying:
I had this same issue like Autotune failing level please manual tune while doing all axes at once…during each axis autotune i got this error message but end of flight i got autotune success message. See the thread here.