@xfacta
i have T.Drone M690 equipped with CUAV V5+ AC 4.1.5 stable.
as per Arducopter tuning instructions I have configured everything like Initial parameters, Hormonic filters.
i just carried out Autotune yesterday and it was completed after 45min of flight ,each axis takes about 15min to complete .but meanwhile autotuning i got HUD message that Autotune:failing to level please tune manually but anyhow finally i got the message Autotune success message finished all Axis.
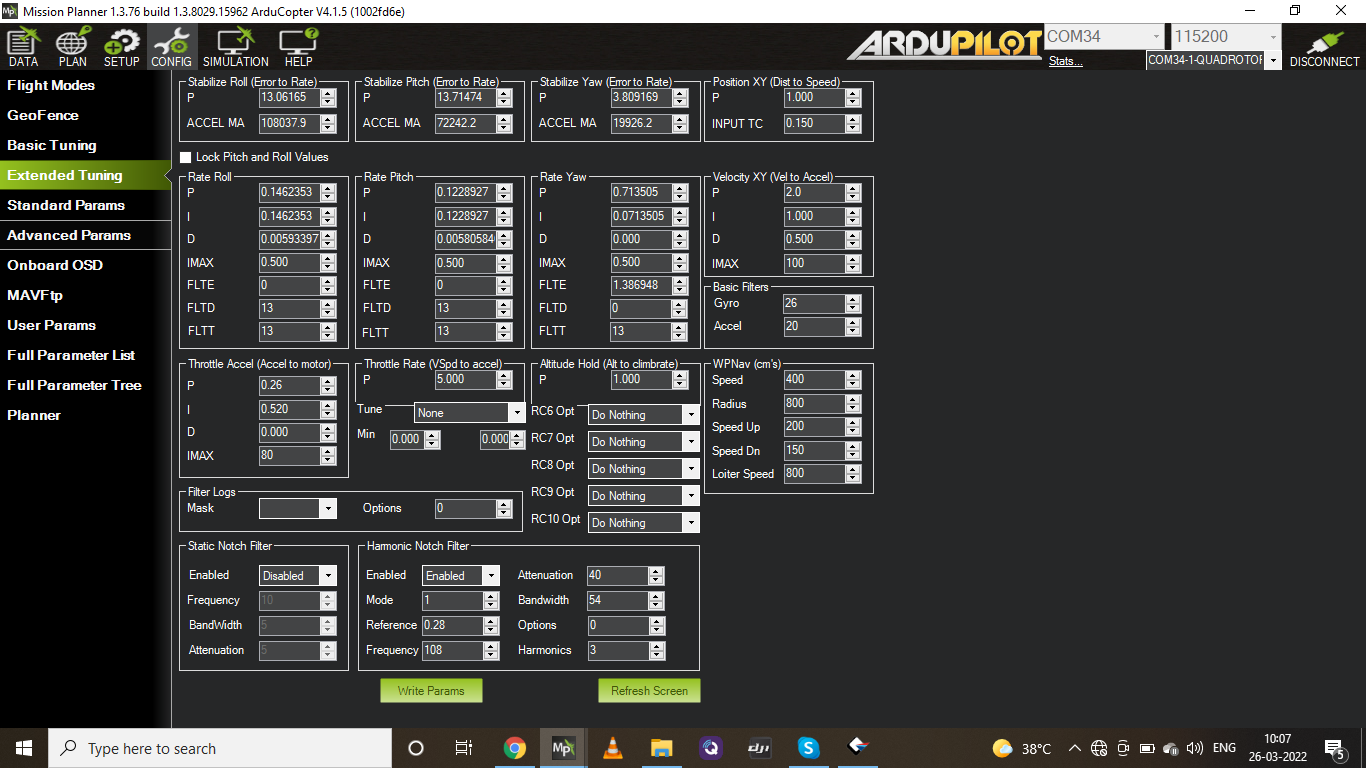
The HNOTCH settings are not typical - I’m not saying you have it wrong though.
Usually I’d expect a frequency around 40Hz for those sized props. When I check the FFT it seems you have good settings.
You might be able to add a static notch at 56Hz, but there isn’t a big peak there anyway.
Have you got a log where you gathered notch filter data before you enabled the HNOTCH?
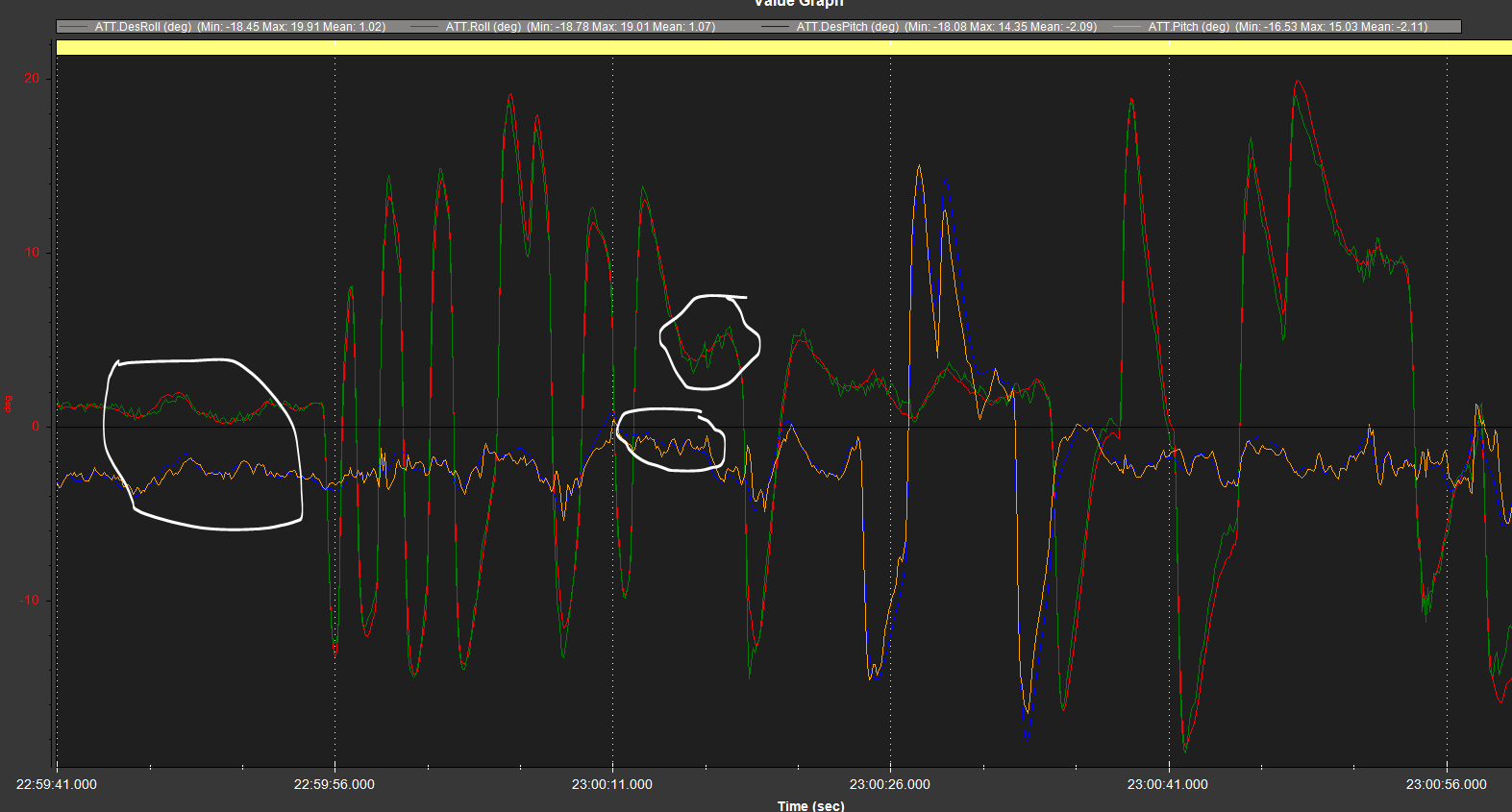
There’s a few of things to try for the instability.
Try lowering INS_GYRO_FILTER,26 to 20
Try lowering INS_ACCEL_FILTER,20 to 18 or 15 (but no lower than 15)
Make these adjustment separately so you know which one is having an affect, if any.
Put these back to how they are now of they do not have any noticeable effect. It’s a good idea to keep checking logs.
If you have good results with a lower INS_GYRO_FILTER value, 20 for example, then also lower ATC_RAT_xxx_FLTx values to half of your INS_GYRO_FILTER value. For example they are 13 now, make them 10. Retest and if flight is good you can always run another pitch and roll Autotune.
Yaw can have another autotune after you’ve sorted out the rest, if it even needs an autotune.
Test different values of MOT_THST_EXPO,0.2
You should be able to use 0.4 with those T-Motor power units.
set too high you can see instability at low throttle
set too low you can see instability at high throttle
Next I would test changing the pitch and roll D terms
ATC_RAT_PIT_D,0.0075
ATC_RAT_RLL_D,0.009
Just do a very short hover test, listen for odd sounding motors, land and immediately check for hot motors. Lower D terms if there is any problem.
If it seems OK do longer and longer flights, checking the motor temperatures regularly.
Check the logs to see if raising the D terms removes these “vibrations” or small movements from pitch and roll
Oh, and I meant to say, always tune without any payload, then adjust these down when you add your payload
new ATC_ACCEL_P_MAX = ATC_ACCEL_P_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_R_MAX = ATC_ACCEL_R_MAX x (min_TOW / max_TOW)
new ATC_ACCEL_Y_MAX = ATC_ACCEL_Y_MAX x (min_TOW / max_TOW)
maybe:
ATC_ACCEL_P_MAX,57000
ATC_ACCEL_R_MAX,86000
ATC_ACCEL_Y_MAX,15000
single digits and decimal places are not critical, these ATC_ACCEL values can all be rounded to the nearest thousand.
I will try to find those log and will send you tomorrow.
If increasing D term futher more will create again more vibration or Oscillation i thing so.it really recommend to increase d term from current autotuned D term…? Its already they about 0.006