Following this issue.
Same thing happened to me today but it only happens in Yaw. I normally do my axis calibration seperatly. Using Holyybro durandal an 4.1 copter
Same here on a Pixhawk 4 on a (quad 17 inch 380kv 750 frame) so I don’t know if its related to bigger quads, as low Kv motors tend more vibrations, tried 4.13 and 4.2 master and both with the same issue error. However the quadcopter was able to do autotune in fw 4.07; for now autotune on the older Firmware then update to newer version.
That error message didn’t exist in 4.0.7. It’s produced if it can’t level between twitches which could just indicate a bad initial tune.
Out of curiosity, can the error appear if the wind conditions are too high for tuning?
That’s a good point, I believe so. Not settling within 2.5° in 5s wouldn’t take much it seems to me.
Yes, the community has become more an more lax on only doing autotune in little to no wind conditions. So this is a very real possibility.
So it could be more than one factor than wind? I had under 2 knots wind that day. Also an update, I was able to do the autotune on the 4.13 and latest master, however I redid this with default everything, PID, new Compass and Accel tune, and the Initial Parameter setup.
Maybe an old settings from a previous FW I know the FTLE was at 10 and now its 14?
IMO, it seems most likely a user added error; as the default settings worked to do the Autotune.
I’m making an OCTA QUAD using 22" props.
Alt-A setup is complete. Because stable flight is possible, I tried auto-tuning,
but a failure message appears. Is the workaround going back to 4.0.7?
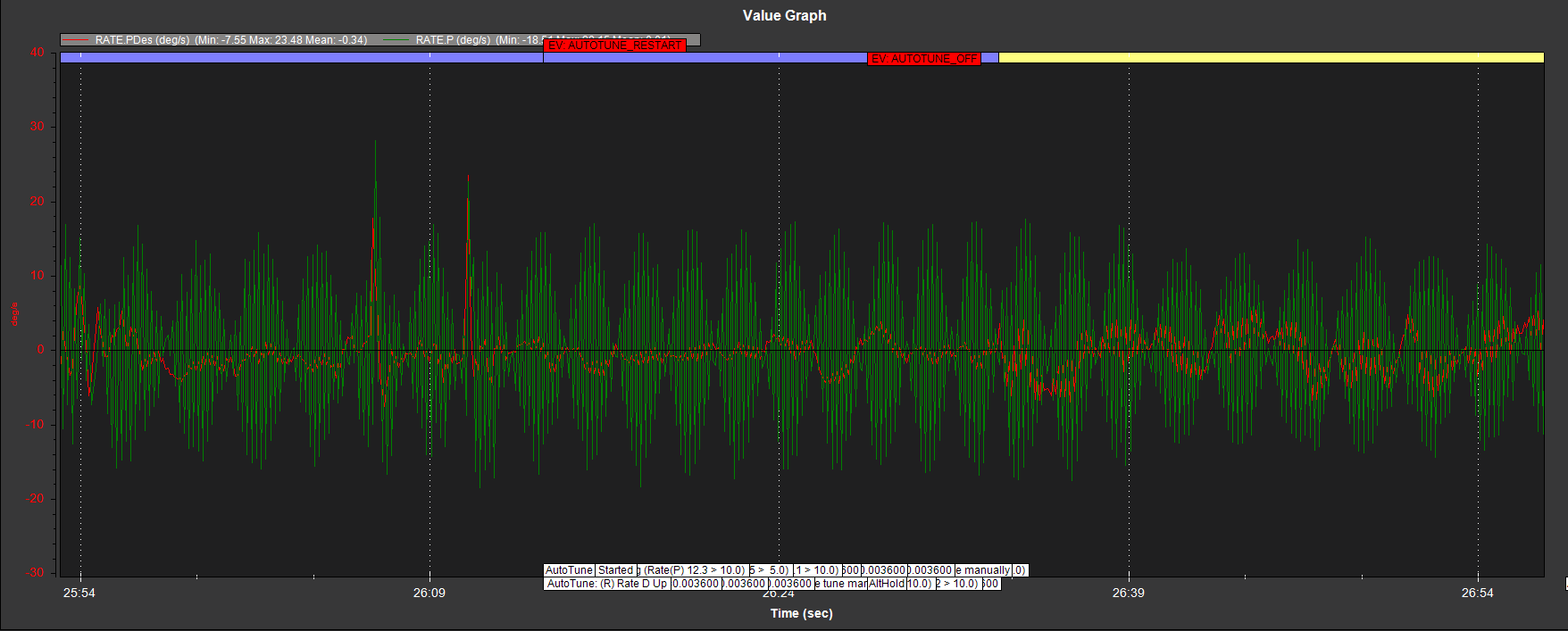
As a result of checking the log, the roll and pitch did not exceed 2.5 while autotune was running.
Here’s a link to the Log
If anyone can help me, I’d really appreciate it.
No the solution is not to downgrade to an older software. The solution is to set the correct parameter values on the latest stable firmware.
Thank you very much for browsing the log.
It seems to be flying stably right now, is it okay if I set all P, I, and D items to half?
When I look at VibeY in my log there is a vibration. Could that be the cause?
I thought it was ok because it was within acceptable range.
Your answer is a big help to me.
@amilcarlucas Thankyou Since we are using the latest stable firmware, we will focus on correct tuning.
I had a question about this - I would guess this set of params is for a S500 exactly as HolyBro recommends it with their kit? I have used their physical kit (frame, ESCs, motors and props) with both a Pixhawk “1”/2.4.8 clone, as well as a Matek F405 FC, and the params preset was unable to take off in both cases until I reduced the PIDs by 50% per the AP Wiki. I am still learning a lot about this, so forgive any ignorance, but the only reasoning I can think of behind this would be a)different flight controller from what was used for the “preset” b) different flight controller mounting configuration (though vibes were under limits in both cases) or c) I am flying with a 3S 5000mAh battery while HolyBro recommends a 4s battery. I would think c) to be the most likely cause, but could anyone with more experience share their thoughts on this? I could post some logs if that would be helpful at all.
Please open the log If you used 3S batteries in the 4S recommended set, it looks like the drone is probably not getting enough thrust to fly.
Have a look at your motor outputs. If they are high or oscillating that would be a clue. I agree that 3S vs 4S is probably part of the issue.
Well, it seems that was the issue! Flew the S500 with the “preset” params and a 4S 5000mAh battery today and it flew very well. Thanks for the pointers @rk2cy_u and @Allister .
It has been flying decently on 3S as well, but only with the adjusted PIDs, which makes me believe it’s just a matter of the motor speed being slower overall on 3S, making the motors’ responses to motor speed changes different, requiring the different PIDs. At least as far as my limited knowledge of PIDs goes, this makes sense to me.
I will be looking at the logs as well to check the thrust issues you both mentioned.
2 Likes
There was a test time, so I reviewed the parameter modification before proceeding, and confirmed that I did not learn about the harmonic notch configuration.
As @Leonardthall advised, is it better to reduce the pitch feed by 50% first?
Or do I have to set up a harmonic notch and tune it automatically?
I’m a little confused. ![]()
In fact, my qudeocta can be controlled stably, but the mount pulled forward to attach the gimbal shakes up and down (low amplitude).
Can you fix the problem by setting the harmonic notch?
It is written in the wiki documentation, and it has been repeated countless times in this forum, the correct way to properly tune a copter is:
Just follow the steps, without skipping a single one, and you are golden.
1 Like
I think there is a bug in new autotune for H-Copters…
I have done manual tune . And drone is flying ok. After that when i try autotune, it shows error, that autotune failed… Unable to level, please tune manually.