Thanks much - I concluded as much about the roll axis. I don’t think the frame is very flexible, but perhaps the vibration damping mount that I’m using is a little soft. I’ll take a look at the filter settings as well.
I think this probably concludes the discussion required for my copter in this thread - I have another thread dedicated to this bulid where I will post any further results.
A quick follow-up - you can pretty much disregard all after bonjour from me in this thread. I learned a ton about copter tuning, and my mistake was exactly what @Quadzilla suspected.
After a crash (completely unrelated to the tune) and subsequent repairs, I hard mounted the carrier board and got it in the air again. This time the entire autotune routine was much faster with zero errors displayed.
Lesson learned, the Cube series have internal IMU vibration damping, and it is likely counterproductive to add more. Just mount it fast to a rigid part of the frame and tune away!
And to back up what you say, see this pic I posted in the vibration thread: A Cube Orange hard-mounted on the mini-carrier with the GPS unit stuck right to the top of it ! And yes it flies fine, vibes are no problem.
Installed a Cube Black on 2mm 3M pads , flashed V4.2.0-dev (e6fb4798) & setup & tried autotune with defaults settings… and get the failing to level, manual tune may be req message
I am willing to go into the Rabbit Hole -no problem with this- but my question is:
Why do we have to get into manual setting with a frame that is pretty standard ?
I am asking the question with the new user perspective in mind, expecting autotune to be an easy step to get into ‘‘ReadyToFly’’ and NOT having to get into complex manual PID tuning
Agree with that but can’t not note that 99% of people flying arducopter are below 25kg (private and companies), so maybe 3-4 different base setup divided by weight class would be a great help.
Autotuned 3 different copters lately, 2 in the 10kg class and one in 25kg and all three told me to go by hand because failing to level.
If you are a professional and consider the aircraft tuned after starting from the defaults and running auto-tune then I have some bad news, you are not a professional (too many barely rate as novice hobbyist).
Perhaps you should be talking to the manufactures of these aircraft and suggesting they take the time to have these kits professionally tuned so that they can provide a standard tune for their customers…
@Leonardthall I agree with your statement and as a member of dev team I can understand the scope and depth of the tuning process.
But my question is related to new user experience and trying to make it easy for them to get started. Allow me to repeat the question : What is the default vehicle target for the default PID as implemented in the Copter Firmware ?
And why I experience an issue with what I always considered as the standard model: 1-2Kg Quad - 500 frame 9-10inch propellers (That I had no problem autotuning until 4.x)
I can open a new thread on this if you wish but I consider that this question has quite essential to have a starting reference to the wiki
There is no “default vehicle target”. The default parameters are chosen to be safe for a wide range of aircraft. The goal is not to let a few people with a particular frame to have a good tune out of the box. The goal is to minimise the chance of injuring a person or damaging an aircraft on the first arm. Given the range of aircraft this alone is a difficult proposition.
Have you considered the possibility that the problem is this airframe, or the way you built it?
Have you went back to 3.x and tested autotune on this airframe?
By the time you get to the “AutoTune: failing to level, please tune manually” message. Autotune has already relaxed the level requirements by a factor of 2. I suspect a log with ATTITUDE_FAST turned on will show high vibration levels, oscillation, or some other serious problem. Of course you may have just been trying to autotune in too much wind with a sloppy tune.
But to be honest, jumping on the forum to blame autotune, 4.x, the default parameters with complete confidence that the aircraft and your build is perfect… well… I tend to work out why I am seeing something before I start telling other people they have got it wrong.
Fair enough, as I wrote initially I don’t mind going down the Rabbit Hole searching for the root cause and report back.
And please don’t take it as a blame but as constructive comment on how to make the ArduPilot experience easier and fun.
I’ve been watching this closely, as I’m very interested in the topic and Copter tuning in general. Is it naive of me to ask if you’ve used the Alt-A plugin yet?
The documentation of that feature is quite lacking, as I’m sure you know, although I am aware that it should be made more readily accessible in Mission Planner if it isn’t already.
Yes, that’s the one. And I think there’s a pull request to make it a button on one of the tuning pages instead of an obscure key combo. I’ll admit that I haven’t checked to see if it’s been incorporated that way or not yet.
EDIT: Ok! The “easy button” has been released. Thanks for the update.
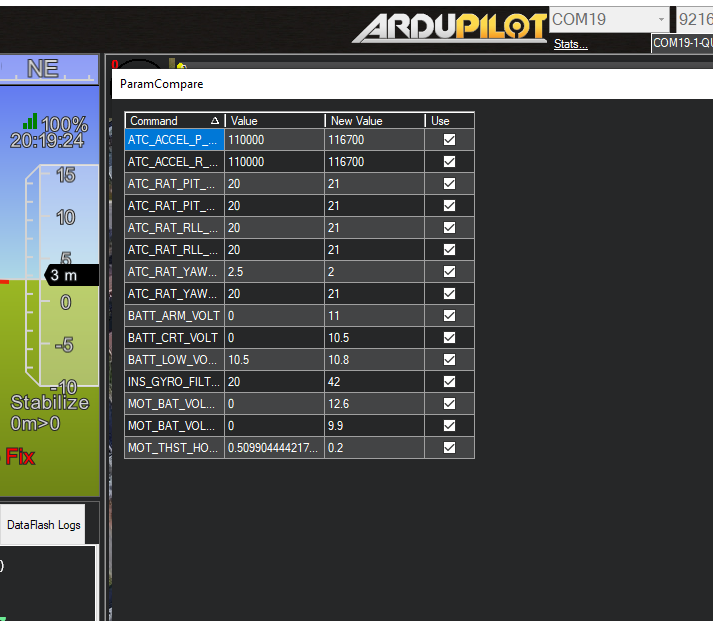
I’ve been meaning to go back and use it for the Copter I mentioned earlier in this thread, since I was unaware of the plug-in at the time. Still, my own problem wasn’t initial parameters so much as a misunderstanding of vibration damping. Incidentally, that Copter is very similar in size to the one you have, and the defaults worked well for me to get started.