I have just finished assembling and configuring a quadcopter with the following:
500 mm across between motor centres
Pixhawk 2.4.8 FCU
900 kV motors & 1045 props
3S 5,200 mAh battery
Arducopter v3.6.11
AUW 1,480 grams
I have successfully flown it several times now, but it needs a completed Autotune to be more responsive and crisp. However, every time I enable Autotune (in Altitude Hold Mode), there is no “twitching” until I move a control stick. The first pass of Autotune is in the roll direction, but if I manually move the copter in any direction (roll, pitch or yaw) the Autotune will then give one twitch in the roll direction and nothing more until I move a stick again …
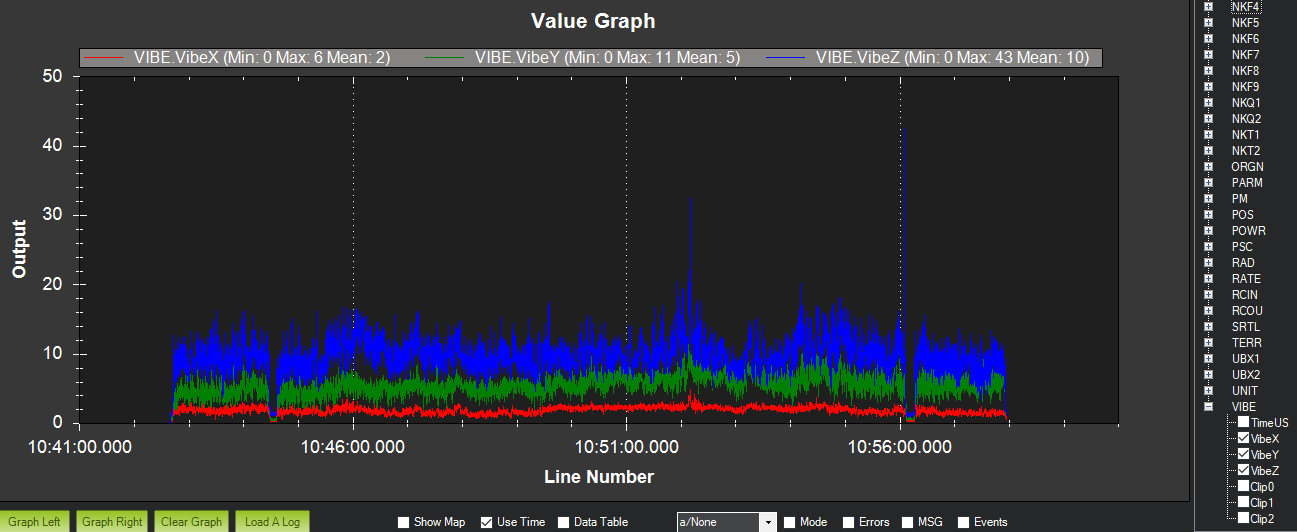
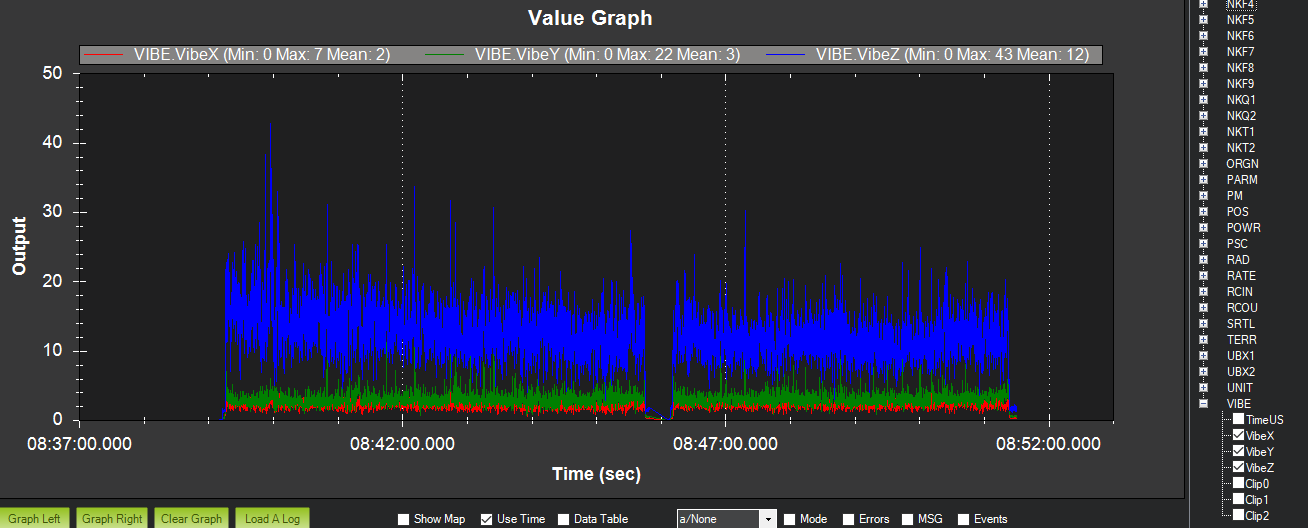
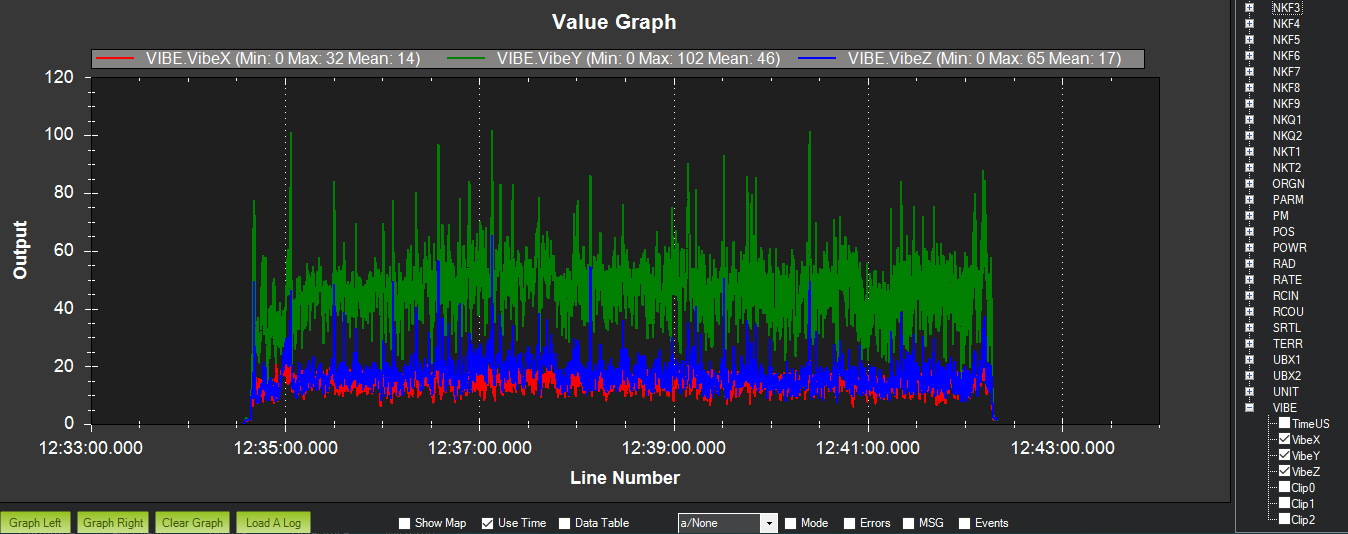
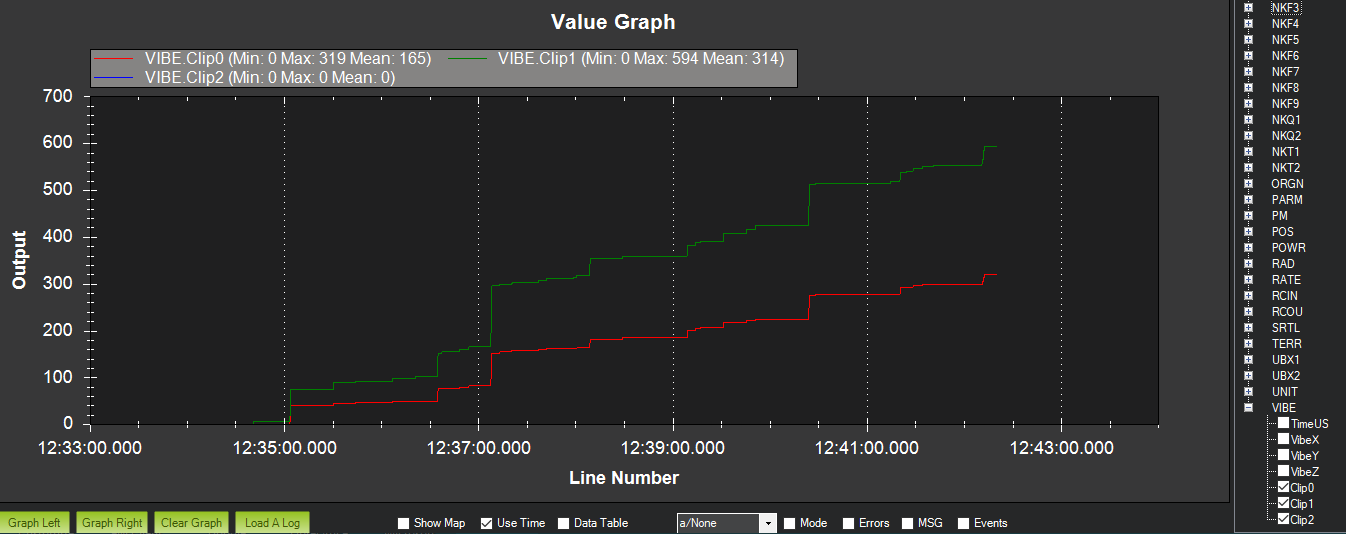
I have spent hours plowing through the log files but cannot find any clues as to what is wrong. I suspected excessive vibration, but the vibration levels appear to be OK?
I thought that the Ch1,2 or 4 dead zone might be too small (20) so I increased them to 40.
I then suspected the the 12" props were too flexible, so replaced then with much stiffer 10" props.
Then, I suspected the anti-vibration mount as described here (Autotune does not function unless input is given) so I removed the anti-vibration mount and fixed the FC with 4 small pieces of double sided foam tape. But, that didn’t help either … 
I have previously built a similar sized Hexacopter and it performed Autotune perfectly. So I am at a loss to figure out what is wrong with this build.
Here is the most recent log file (https://drive.google.com/open?id=1NRnF0DAhdgLW1xIs4tTt_nBmgVO1o6rA) - I would welcome any suggestions or advice as to what I need to change or fix. This issue has me really puzzled …

 Moreover the notch filter its working very narrow in that, I m using high value for amplitude, also more than 100 db is working good for me, and already 50 db and less is making the autotune working, but fine tuning it make you finetuning also the low pass filter making it lower in some case if you put more amplitude on the notch. You will have a very good tune, you’ll never have without the notch filter.
Moreover the notch filter its working very narrow in that, I m using high value for amplitude, also more than 100 db is working good for me, and already 50 db and less is making the autotune working, but fine tuning it make you finetuning also the low pass filter making it lower in some case if you put more amplitude on the notch. You will have a very good tune, you’ll never have without the notch filter.